局部特征(2)——Harris角点
转载请注明此文来源: http://www.cnblogs.com/jiang1st2010/archive/2013/05/14/3077924.html
在入门篇中偶尔谈到了Harris Corner,在这里我们就重点聊一聊Harris Corner。
Harris Corner是最典型的角点检测子Corner Detector。角点经常被检测在边缘的交界处、被遮挡的边缘、纹理性很强的部分。满足这些条件一般都是稳定的、重复性比较高的点,所以实际上他们是不是角点并不重要(因为我们的目标就是找一些稳定、重复性高的点以作为特征点)。
Harris Corner基于二阶矩阵:
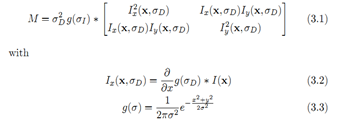
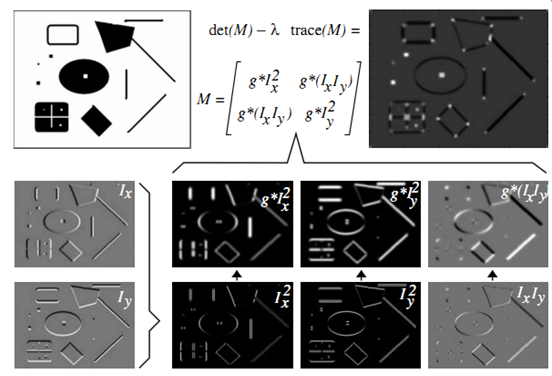
这个矩阵描述了局部邻域内梯度的分布情况。矩阵的两个特征值可以用来描述两个主要方向上信号的变化,因此特征值可以用来判决是否为特征点。Harris采用的判别方法是:

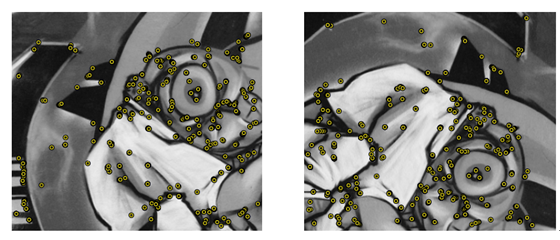
显而易见,cornerness的值越大,对应的两个特征值都应该很大,其中λ取0.04,是为了抑制比较明显的直线。最后对整幅图像得到的cornerness做一个非极大抑制,得到最后的特征点。Harris角点具有的优点是平移不变、旋转不变,能克服一定光照变化。可以先从一个例子上观察Harris Corner实现的过程:
现在有几个问题:首先为什么3.1式矩阵的两个特征值可以用来描述两个主要方向上信号的变化;另外一个问题是为什么3.4式用来决定是否为角点。
要知道为什么3.1可以作为这个矩阵,我们了解一下具体怎么推出这个式子的,那这又要从Moravec算子说起,步骤如下:
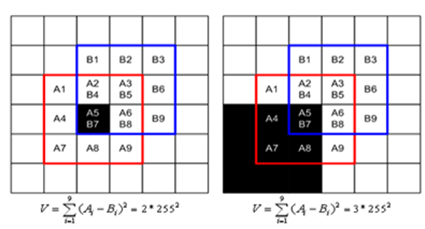
0)将要判断的点置于一个3*3或5*5的图像块的中心,如下图用红色的线环绕的图像块。
1)将红色的框朝8个方向移动一格,得到蓝色的框(下图为向右上角移动)。导致一个缺点:响应是各向异性的(啥意思?)
2)将红色的框和蓝色的框的相同坐标值的点的像素值相减,并求平方和,可以得到8个值。
3)将8个值中的最小的值作为角点像素的变化值。(因为角点应该在x、y方向上变化都比较大;而在边缘上只可能一个方向大、另一个方向小)
4)求出每一个像素点的角点像素变化值,在局部图像块中,该值最大的点为角点。
Harris算子将Moravec算子做了两个推广:
1)用像素的变化梯度代替像素值相减并引入高斯窗函数(举个x方向上变化的例子为证)。
引入高斯窗是为了滤除噪声的干扰。
 [-1,0,1]:x方向上的偏导,[-1,0,1]T:y方向上的偏导。
[-1,0,1]:x方向上的偏导,[-1,0,1]T:y方向上的偏导。
2)推广出了一个公式这样可以计算任意方向上的像素值变化,而不在是8个固定的方向。
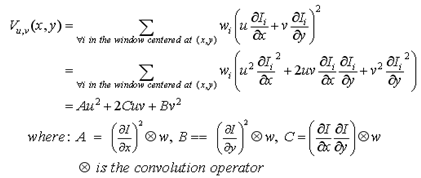
(这里的u、v表示x/y方向的位移)
因为Vuv(x,y)的最小值才是这个点需要被考虑的值,因此我们重写以上表达式:

看到M矩阵的形式了么?这就是Harris算子的那个原始矩阵,我想推到这里,你也就应该了解Harris矩阵为什么是这样子的了。
第二个问题:为什么3.4可以用来描述是否为角点。
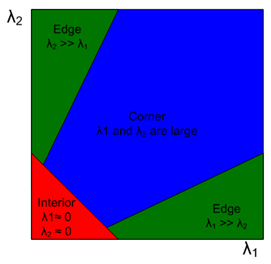
可以参考这样一个图:描述了不同纹理下α和β的取值情况:
a)没有什么纹理的情况下,两个值都很小(很小的正值)
b)边缘的点,一个值大,另外一个值小(由于k取了很小的值,所以3.4的结果为一个小负值)
c)角点:两个值都比较大(比较大的正值)
这样,当我们把目标函数定义为3.4式的时候,得到的结果就会尽力满足两个特征值都比较大了。当然,除此之外,还有Harmonic mean等方式实现更理想的组合方式达到检测出的两个特征值都尽可能大。
检测效果图(右图进行了旋转)