雷达原理-多普勒效应及应用
一、概念
一、多普勒效应及应用
1、多普勒效应
多普勒效应是指当发射源和接收者之间有相对径向运动时,接收到的信号频率将发生变化。
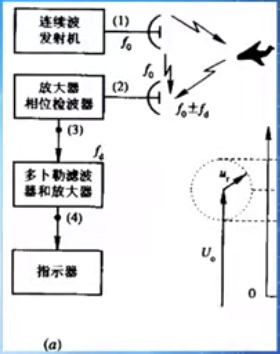
(1)连续波雷达
对于连续波雷达而言,收发天线是无法共用的。
发射信号:
回波信号:
其中,当目标与雷达之间无相对运动时, 为回波滞后于发射信号的时间,
为目标和雷达之间的距离。
当目标与雷达之间有相对运动时,距离 随时间变化。设目标以匀速相对雷达站运动,则在
时刻,目标与雷达之间的距离
为:
其中, 为目标相对于雷达的径向速度。所以有:
代入 有:
所以
进一步将 展开:
其中, 。
(2)脉冲雷达
发射信号:
其中,
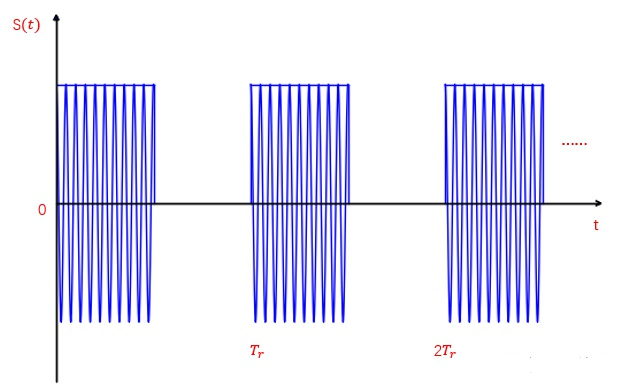
回波信号:
2、多普勒信息的提取
根据前面的分析可知
那么
也就是说,只要设法取得 和
的差频,就得到了
。只要将发射信号
和回波信号
进行混频就可以得到
。这里就需要用到相位检波器。
(1)连续波雷达
为取出收发信号频率的差频,可以在接收机检波器输入端引入发射信号作为基准电压,在检波器输出端即可得到收发频率的差频电压,即多普勒频率电压。这时的基准电压通常称为相参(干)电压,而完成差频比较的检波器称为相干检波器。相干检波器就是一种相位检波器。
从数学模型的角度来说,就是将发射信号 和回波信号
相乘(混频),根据三角公式,将会产生一个高频分量和一个低频分量,然后进行低通滤波就可以得到
。
最后得到的多普勒频率信号为:
(2)脉冲雷达
利用多普勒效应的脉冲雷达框图及各主要点的波形,如下图所示。
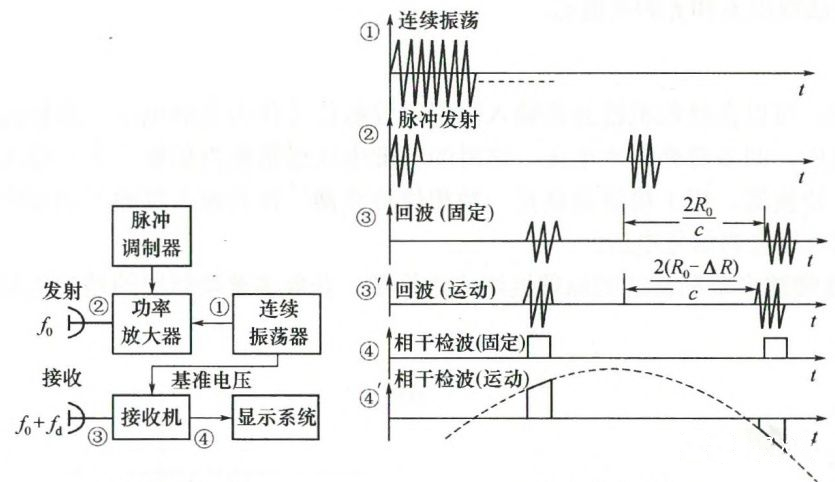
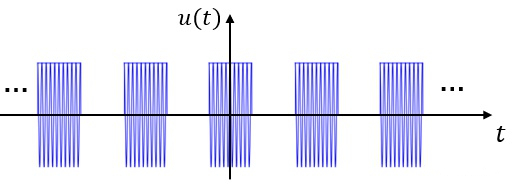
脉冲雷达接收信号:
连续波信号(基准电压):
将脉冲雷达接收信号和连续波信号通过相位检波器进行混频,得到:
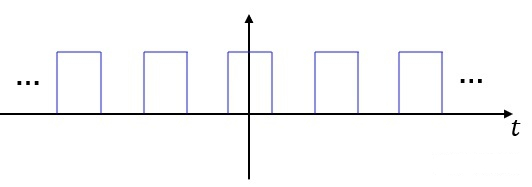
对于固定目标, ,输出结果为等幅脉冲序列,见上图右边波形 ④ 。
对于运动目标, ,
相对于
比较小,
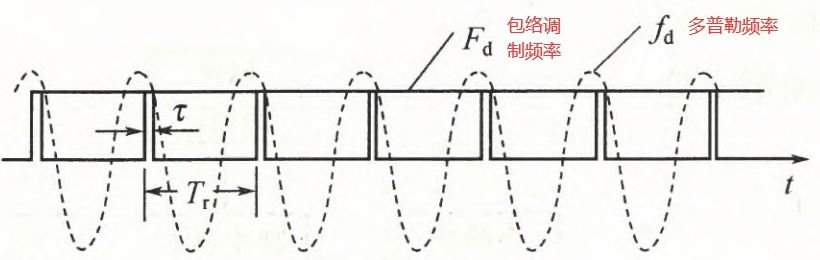
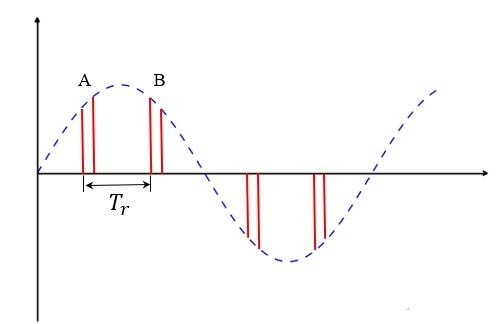
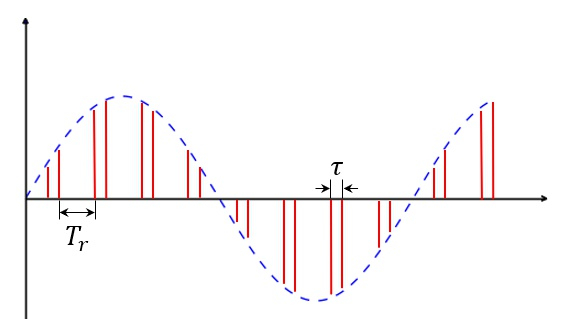
为脉冲重复周期。整个表达式可以看作,连续波充当了周期脉冲的包络,也就是说回波脉冲的包络调制频率即多普勒频率。如下图所示。
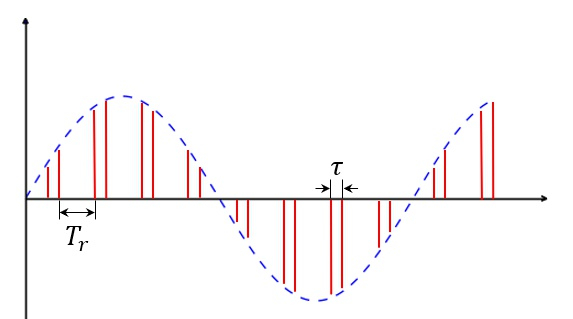
实际上,经过相位检波之后得到的就是图中红色所示的脉冲序列,其包络即为:
对于脉冲雷达,相位检波器输出可以看作是对连续波进行了采样,所以可以通过 FFT 求得 。
3、盲速和频闪
当雷达处于脉冲工作状态时,将发生区别于连续工作状态的特殊问题,即盲速和频闪效应。
(1)盲速
所谓盲速,是指目标虽然有一定的径向速度 ,但若其回波信号经过相位检波器后,输出为一串等幅脉冲,与固定目标的回波相同,此时的目标运动速度称为盲速。如下图所示。
当 ,
时,就会出现盲速。
当 ,即
,第一盲速
。
当存在盲速时,就需要采取相应的方法消除盲速。但我们所说的消除盲速,并不是指完全将盲速消除,而是增大第一盲速,只要目标速度小于第一盲速,就不会出现盲速。这和前面讲的解距离模糊类似,采样重频参差是为了增大最大无模糊距离,并不是完全消除距离模糊。
(2)频闪
当 时,就会出现频闪现象。直观来讲就是脉冲包络存在多种拟合方式,如下图中的实线和虚线所示。
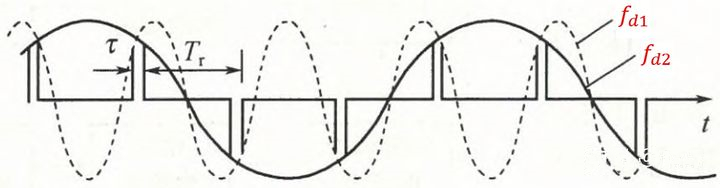
那么如何避免频闪呢?只需要满足
其中, 可以看作是对连续波进行采样的频率(图中脉冲),
可以看作是连续波的频率(图中实现或虚线所示的连续波)。也就是说,只要满足奈奎斯特采样定理就不会出现频闪。
二、动目标显示雷达
1、基本工作原理
经过相位检波之后,去除固定目标的回波,只保留运动目标的回波。
2、中频部分进行相检的原理
相位检波通常是在中频进行的。
发射信号的相位:
回波信号的相位:
本振信号的相位:
发射信号和本振混频之后的相位:
回波信号和本振混频之后的相位:
相位检波器就是将发射信号的中频和回波的中频再进行混频,再通过低通滤波器就得到 。
相位检波之后得到:
3、消除固定目标回波
在相位检波器输出端,固定目标的回波是一串振幅不变的脉冲,而运动目标的回波是一串振幅调制的脉冲。据此,将相位检波器输出通过相消器,就可以消除固定目标回波,保留运动目标回波。
由相位检波器输出的脉冲包络为:
一次相消器:输入为相位检波之后的输出。如下图所示。
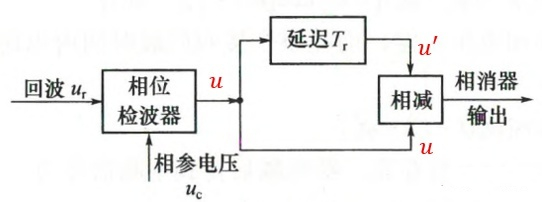
相消器是想把固定目标的回波消除掉。
对于固定目标的回波,脉冲多普勒雷达经过相位检波之后的输出为一串等幅脉冲,脉冲间隔为 。如果脉冲序列足够长,将其迟延
之后得到的脉冲序列,和原来的脉冲序列将会重合到一起,将两个相减输出
。
对于运动目标,除开盲速的情况,输出 。
从信号与系统的角度来分析:
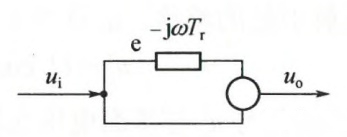
传递响应函数:
幅频特性:
如下图所示。
从幅频特性角度来看, 就是一个滤波器,相当于将
的固定目标,及以盲速运动的目标就全部过滤掉了。
三、盲速、盲相的影响极其解决途径
1、盲速
所谓盲速是指,目标实际上有运动速度,但对于雷达来说经过相检之后的输出和固定目标相检之后的输出都是等幅的脉冲串,导致无法区分。
根据前面的推导可知,当目标的多普勒频率满足:
就会产生盲速。
第一盲速,即 ,再根据
,有:
要想不出现盲速,并不是要彻底消除盲速问题,是要想办法将第一盲速的值扩大。
从公式可知,只要增大 就可以增大
,但是,
增大,
就减小,就与前面讲到的无模糊距离矛盾了(根据第六章目标距离测量相关内容,雷达的最大无模糊距离为
)。增大
虽然使第一盲速增大了,但是最大无模糊距离就减小了。
那么如何解决盲速问题呢?
可以采用重频参差的方法。
对于两重频:
实际上就是将第一盲速的值扩大了。
2、盲相
盲相也是有脉冲多普勒雷达引发的问题。
(1)点盲相
如图所示, 点和
点幅度相同,经过相消器处理,就是将上述图形迟延
,从图上来说,就是将
点移到了
点,然后再相减,
点就减为 0 了,这一点的相位信息也就损失掉了。这种情况称之为点盲相。
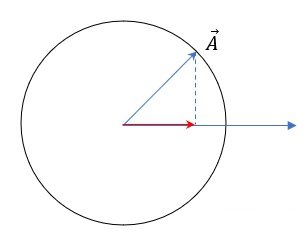
从矢量分析的角度来看,对于余弦信号 ,可以看作是矢量
以角速度
运动,在水平轴上的投影。
(2)连续盲相
回波叠加在很强的杂波上,可能产生连续盲相。
(3)解决办法
a)中频对消
不通过相位检波器,直接将中频输出结果进行对消。
中频输出 :
为中频角频率。注意,这里只写出了连续波信号部分,实际上这里应该是以该连续波为包络的一个个脉冲串。
将 迟延
之后得到:
将 和
进行对消得到:
对消的目的是想将固定目标回波消除掉,也就是说要在 的时候,使对消器输出
。
对于固定目标而言 ,想要在中频进行对消(即消除固定目标回波),
就不能随便选,需要满足如下条件:
如此,对于固定目标, 的前一项
,即相消器输出为0,固定目标回波就被消除掉了。
对于盲速运动的目标, ,得到的
,也就是说将盲速运动的目标也消除掉了。
b)零中频
即 双通道处理。也可以解决盲相的问题。
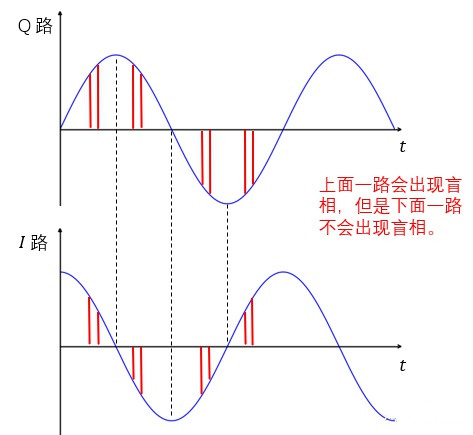
正交双通道由两路相同的支路组成,差别只是其基准的相参电压相位差 90°,这两路分别称为同相支路( 支路)和正交支路(
支路)。
四、回波和杂波的频谱及动目标显示器
运动目标检测的任务就是根据运动目标回波和杂波在频谱结构上的差别,从频率上将它们区分,以达到抑制固定杂波而显示运动目标回波的目的。为此,应首先弄清目标和杂波的回波特性,以便采用正确的措施。
1、回波信号和杂波的频谱
(1)雷达回波信号的频谱
雷达回波:
回波频谱:
我们分析频谱,往往分析的是其幅频特性。假设目标不动,将上式两边取模,这时你会发现接收信号的幅频特性和发射信号的幅频特性基本相同,只是优于回波多了一个 导致其幅频特性的高低有差别。如果目标运动,接收信号和发射信号的载频就相差一个多普勒频率
。所以,只要将发射信号的频谱分析清楚就能得到接收信号的频谱。
雷达发射相参脉冲串,其脉冲宽度为 ,脉冲重复频率为
。当天线不扫描而对准目标时,所得脉冲为无限脉冲串。雷达发射信号:
其中,
雷达发射信号 如下图所示。
实际上雷达不可能发射从负无穷到正无穷的信号,这里只是为了理论推导方便,假设 是从负无穷到正无穷。
那么, 的频谱怎么求呢?可以先不考虑后面的余弦项,只考虑 rect 项,如下所示。最后乘以 cos 项,相当于将 rect 项的频谱进行搬移即可得到
的频谱。
根据信号与系统理论可知,周期函数的傅里叶变换是通过傅里叶级数来实现的,周期函数的傅里叶级数是一根根离散的 delta 函数,delta 函数的间隔就是周期的倒数。这些 delta 函数的包络就和一个周期内部的信号的傅里叶变换有关。门函数的傅里叶变换是一个辛克函数,所以这些 delta 函数的包络就是辛克函数。如下图所示。注意,幅频特性是取了绝对值的,所以图中只有正值没有负值。
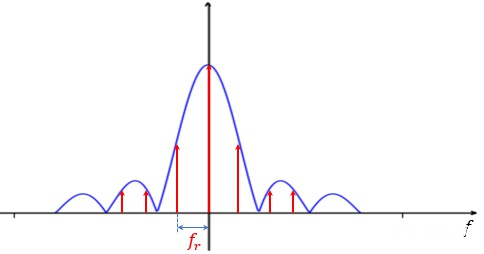
最后,将 rect 项乘以 cos 项,相当于将上述频谱往左右搬移,得到:
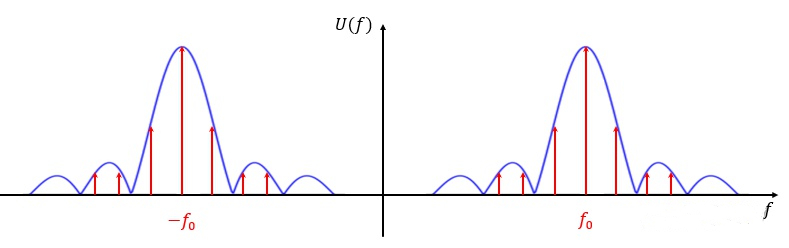
在没有多普勒频移的情况下,接收信号的频谱和发射信号的频谱形状类似。
雷达工作时,天线总是以各种方式进行扫描。这时收到的回波脉冲为有限数,且其振幅受天线方向图调制。雷达实际的接收信号可表示为:
其中, 为天线的扫描函数,实际就是一个高斯函数,图形如下所示。注意,天线方向图是角度
的函数,扫描的过程就是
随
线性变化的过程。
所以,回波信号 的频谱:
表示卷积。这里的
实际上可以用发射信号的频谱
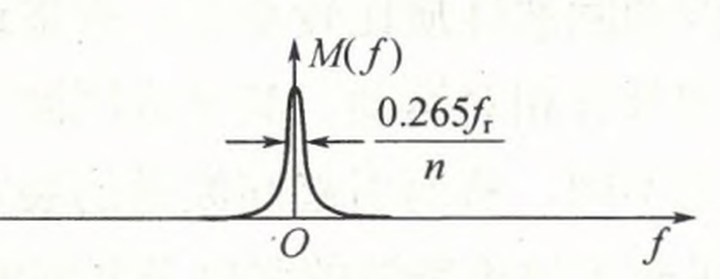
代替,因为从前面的分析可知,接收信号的频谱和发射信号的频谱基本相同。其中,天线的扫描函数
的频频为:
表示在天线扫描期间收到的回波脉冲个数。
图形如下所示:
因此,回波信号的频谱就是 和一串 delta 谱线的卷积,相当于将
搬移到每根 delta 谱线位置。结果如下图所示。
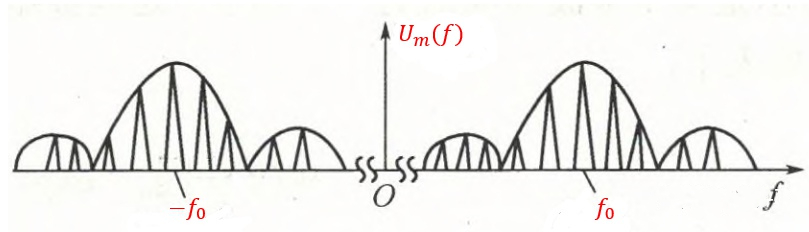
以上均假设是建立在目标不动的条件下进行的推导,此时接收信号和发射信号的频谱形状可以近似认为是相同的。
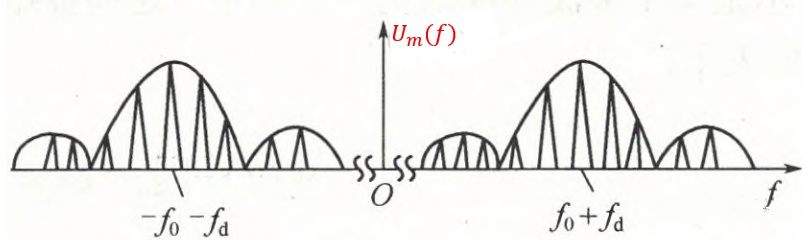
如果目标在运动,接收信号相对于发射信号就会存在一个多普勒频率 ,因此,对于动目标接收信号频谱如下所示。
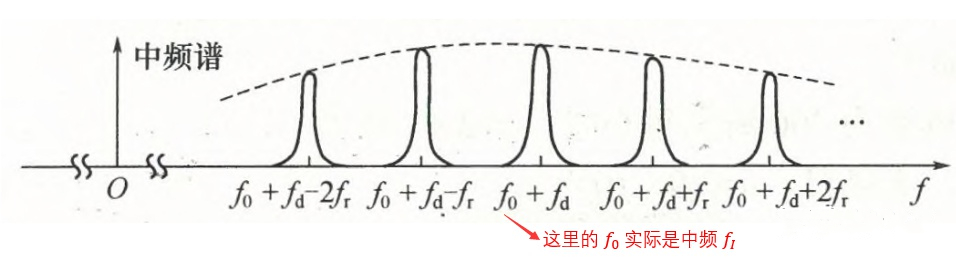
回波中频对应的频谱如下图所示,图中 实际上是射频
经过下变频之后的中频频率,两者之差一个本振频率。
对中频信号进一步进行处理,相位检波器将中频回波和相干电压(如下图所示)进行相干检波。可以参见前面中频部分进行相检的原理一节。

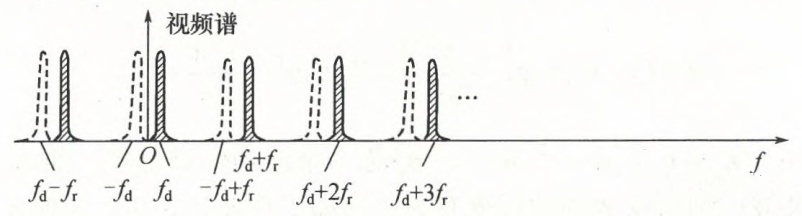
中频回波信号经过相位检波器后(就是将中频回波和相干电压做相位检波,实际就是进行混频过低通),相当于把中频信号的频谱搬到零频率附近,根据目标多普勒频移 的不同,相位检波后谱线
的具体位置也有差异,每根谱线均按脉冲串包络的频谱形状展宽。天线扫描时,回波频谱的形状见下图。图中虚线表示单路相位检波所产生的频谱折叠情况,是由负频率轴频谱差拍而产生的(也就是负半轴和相干电压混频得到的)。
如何做到不要虚线部分的频谱呢?
对于下图而言,只要没有负半轴就可以到达上述目的。实际上,根据《随机信号分析》的理论可知,解析信号就没有负半轴。 频谱包含正半轴和负半轴;
就只有正半轴,没有负半轴。
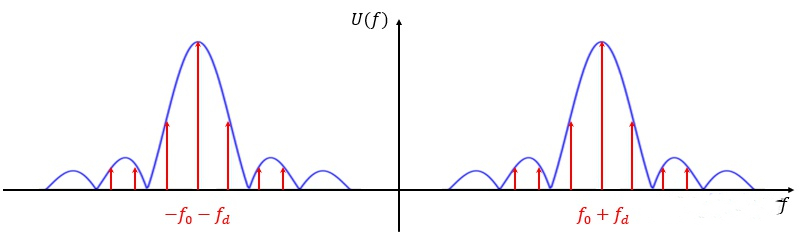
实际在处理的时候,如何得到如 这样的信号呢?可以利用
双路处理。一路
表示信号的实部,另外一路
表示信号的虚部,就可以得到
。再进行相干检波出来的结果,就只有
。
(2)杂波的频谱
雷达工作时可能碰到的杂波包括地物、海浪、云雨及敌人施放的金属箔等。
杂波的频谱和前面分析的固定目标的频谱类似。
2、动目标显示滤波器
动目标显示滤波器利用运动目标回波和杂波在频谱上的区别,可有效地抑制杂波而提取信号。
跟前面讲的概念类似,需要使用相消器。当用 Z 变换进行分析时,可将它画成如下图所示的样子。
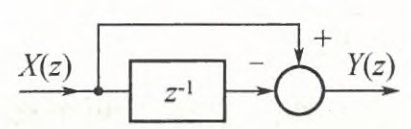
传输函数为:
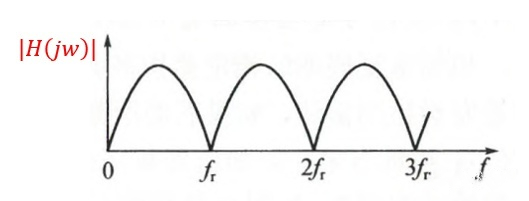
根据前面消除固定目标回波一节的知识,可知幅频特性为:
其图形如下:
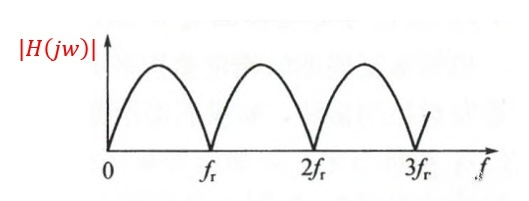
该线性系统将频率为 处的回波滤除掉了。当
时,对应的就是固定目标的回波。当
时,对应以盲速运动的目标的回波。
五、动目标检测(MTD)
MTD 与 MTI (动目标显示雷达)是有区别的,MTD 是在 MTI 的性能基础上进一步完善和提高了。
1、动目标检测的特点
(1)动态范围更大
(2)改善因子提高
需要和噪声系数的定义区别开,噪声系数的定义是输入的信噪比与输出的信噪比的比值。改善因子的定义是,输出信杂比与输入信杂比的比值。主要体现在对杂波的改善上。通过动目标检测雷达合理的设计,可以使得输出的杂波比输入的杂波要小,即将杂波消除的更多一些。
(3)增加多普勒滤波器组
对动目标检测雷达来讲,通过滤波器组将运动目标多普勒频率测量出来。
(4)抑制地杂波
(5)增加杂波图
不同地方的地物杂波是不一样的。相当于把不同区域的地物杂波的特性存储下来,对于杂波比较强得地方,把杂波门限提高,对杂波比较弱的地方门限降低,有了杂波图之后,相应的门限就不再是一个固定门限,检测起来就有一定的灵活性。
2、多普勒滤波器组
具有 个输出的横向滤波如下图所示。
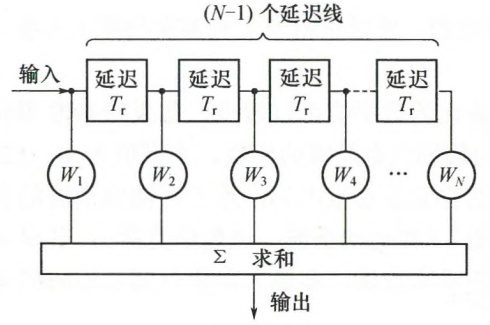
其输入就是相位检波之后的输出信号。相位检波之后的输出信号如下图所示,回波脉冲的包络调制频率即多普勒频率。多普勒滤波器组就是用来测量多普勒频率的。
前面已经讲过,对于脉冲雷达,相位检波器输出可以看作是对连续波进行了采样,所以可以通过 FFT 求得 。该横向滤波器就是用硬件实现了一个类似于 FFT 的结构。
权值:
表示第
个抽头,
表示从 0 到
的标记,每一个
值对应一组不同的加权值
,相应地对应于一个不同的多普勒滤波器响应。也就是说每一个横向滤波器对应一个固定的
值,输出一个相应。
的取值从 0 到
,表示实际上需要搭
个横向滤波器。
横向滤波器的总输出(对应于傅里叶变换的公式):
式中的 的取值如下所示,有多少个脉冲
就等于几。
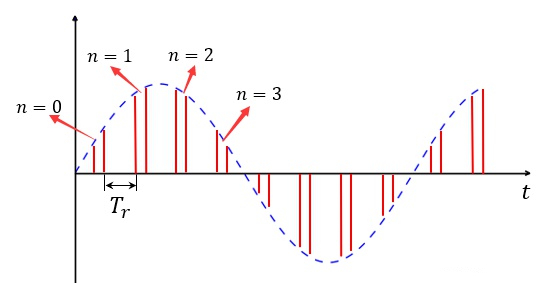
每一个值实际上对应的是一个频率,0 对应的频率是
, 1 对应的频率是
,2 对应的频率是
以此类推。
求出所有 之后,找出
里面哪一个
对应的值最大,频率就是
对应的频率,该频率就是回波脉冲的包络调制频率即多普勒频率,根据多普勒频率就可以求得目标的速度。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具