雷达原理-绪论
雷达原理
一、概念
radar->radio detection and ranging无线电探测和测距
雷达是radar的音译
雷达发射的是电磁波信号
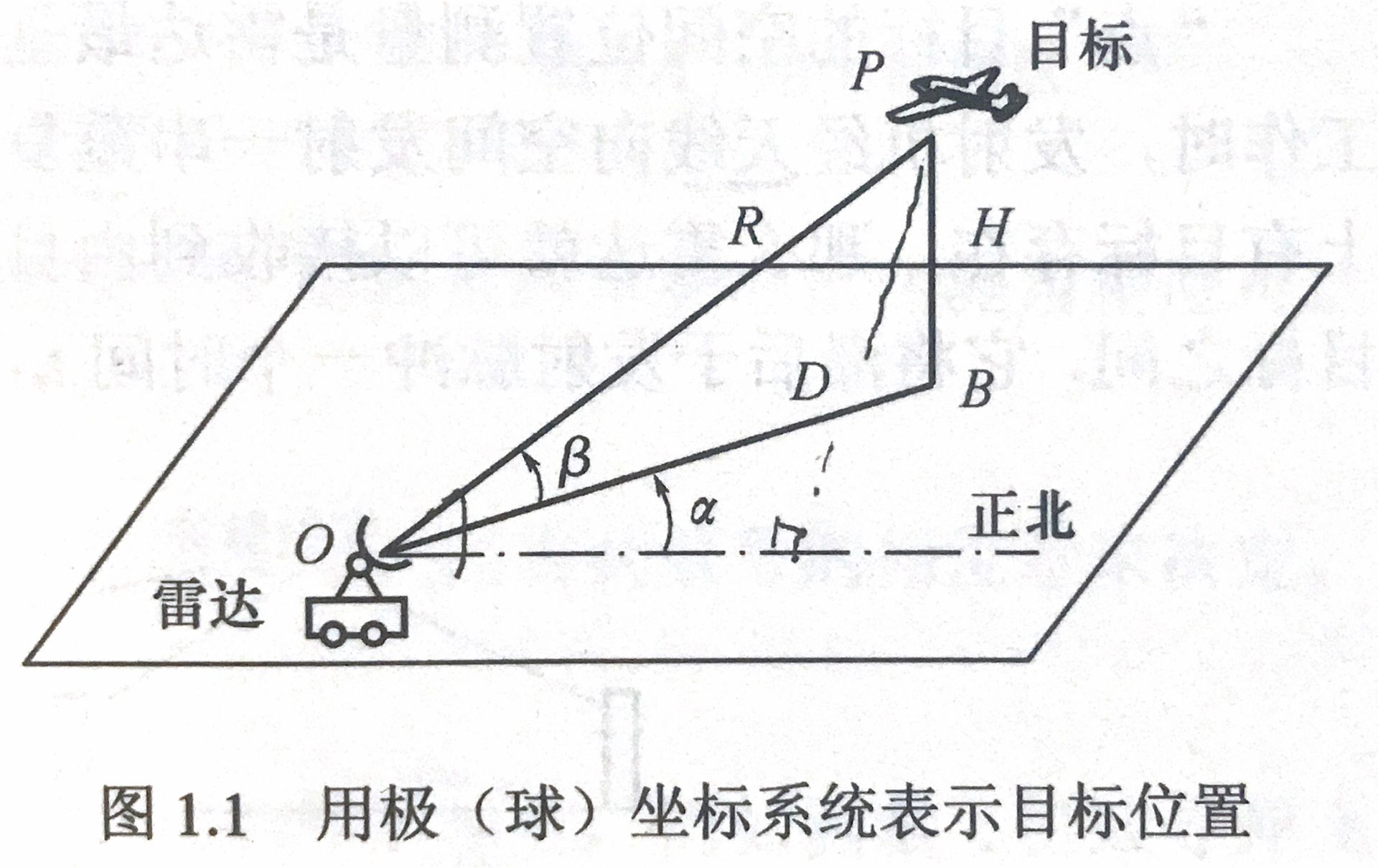
雷达探测目标原理如下图所示
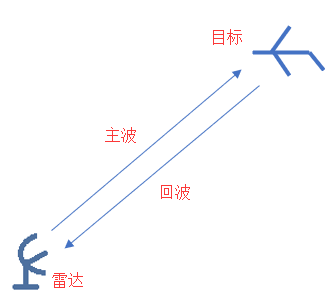
雷达发射机产生射频信号,经雷达发射天线辐射到空间,当电磁波遇到目标发生反射,回波信号经雷达接收天线,到达接收机,经接收机处理后,送给信号处理机进行处理,获得目标参数:距离、方位、速度和形状等。
二、任务
早期:测距。
现代:测距、测角度、测速度、测形状。
三、基本组成
天线
将射频信号辐射到空间,接收回波信号。
发射机
产生雷达信号。
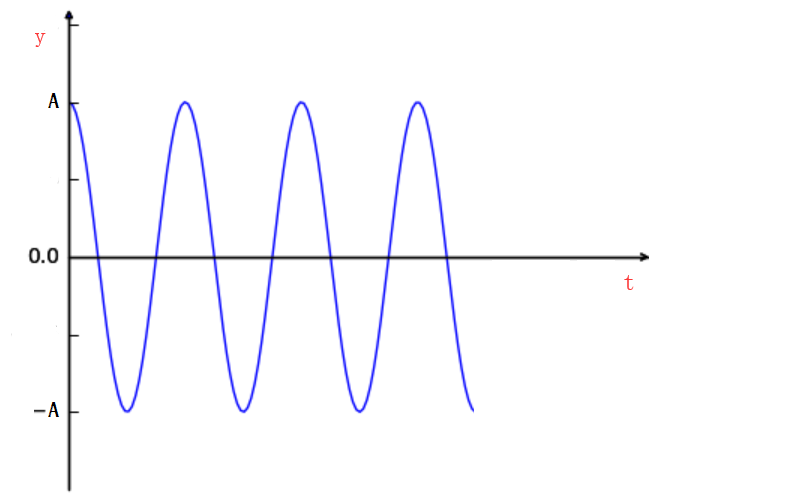
雷达发射的信号一般可分为连续波信号和脉冲信号。
[1] 连续波信号
其中,\(s_{t}(t)\)代表发射的信号,下标 t 表示 transmit,参数 t 表示 time。
\(f_{0}\):表示信号频率(射频信号,即发射信号的频率),即单位周期内波的个数,与信号周期的关系可表示为 \(T=1/f_{0}\)。
\(\lambda\):表示波长(电磁波在一个周期内走的长度),\(\lambda=TC=C/f_{0}\)。
其中\(\lambda*f_{0}=C\) \(\quad C=3×10^{8}m/s\)
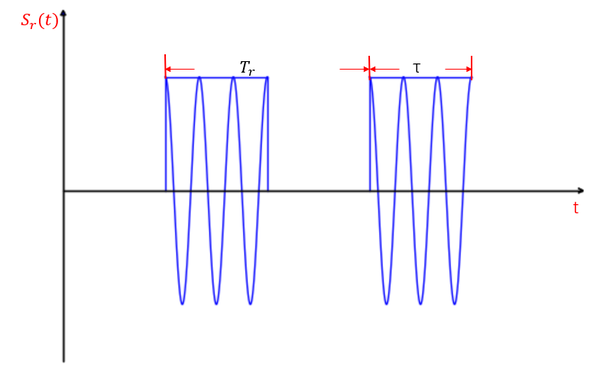
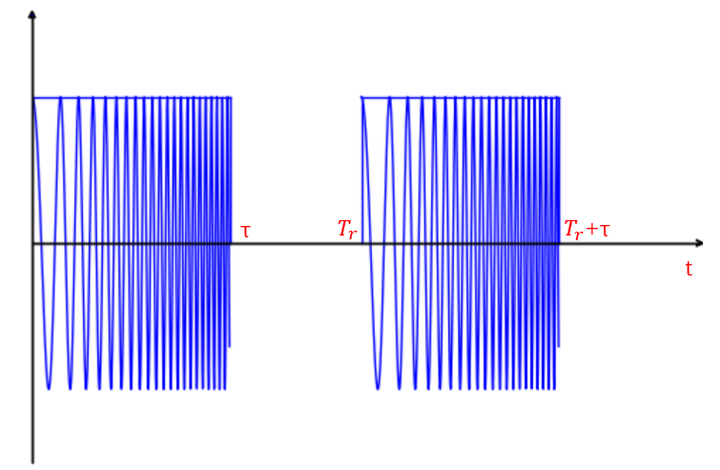
[2] 脉冲信号
脉冲发一会 休息一会 这样需要的能量不会特别多
发射信号(主波):
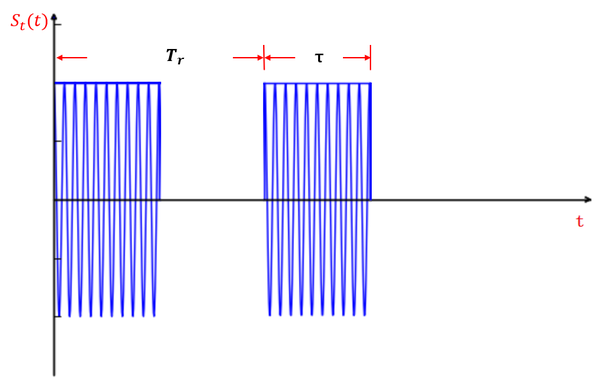
图中变量含义如下。
: 脉冲宽度 单位是秒
:脉冲重复周期 单位是秒 。与\(T\)区分开\(T\)指的是\(\tau\)内电磁波的周期
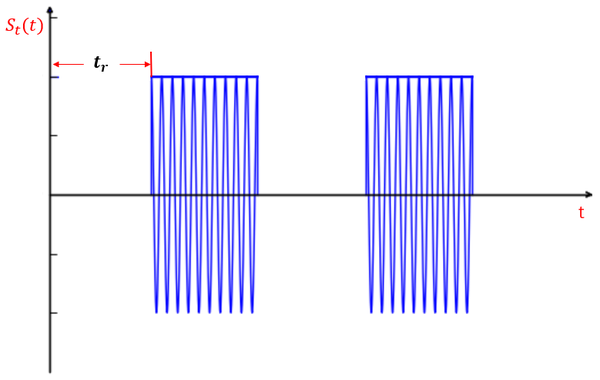
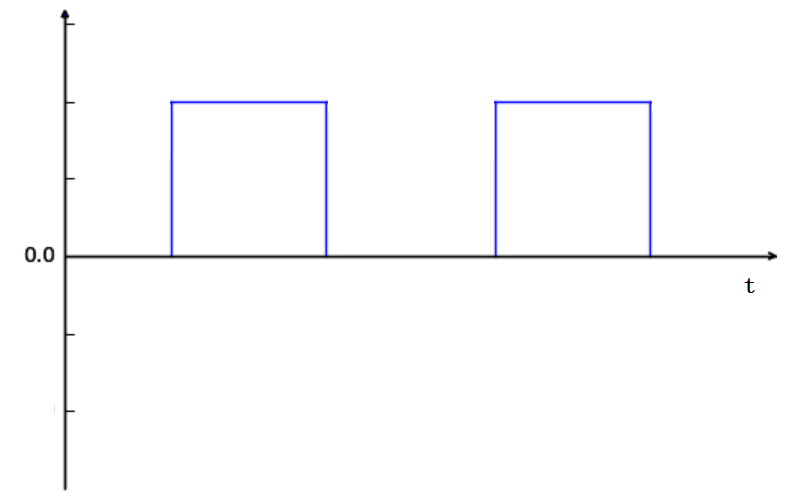
回波信号:
接收机
接收回波信号,并进行处理。一般会经历射频 -> 中频 -> 视频的处理过程。
接收机收到的是射频信号,频率本来就比较高,如果直接在射频上进行采样,根据奈奎斯特采样定理,采样频率需要大于信号频率的两倍,才能将采样后的信号无失真的还原回去。直接在射频上进行采样,成本就会很高,所以就需要对射频信号进行混频处理,变到中频,这样对采样率的要求就降低了。
混频,从数学上讲就是求频率差。
表示射频信号对应的频率,R 表示 receive;
表示本振信号对应的频率,L 表示local;
表示中频信号对应的频率。
从图中可知,中频信号,频率虽然变低了,但是包络还是原来的包络。
视频
中频信号经过包络检波处理,就得到视频信号。
那么,是否所有的接收机,都需要按照射频->中频->视频的过程进行处理呢?答案是否定的。实际上,这和雷达的具体应用有关。
一般来说,如果要测距就需要做视频处理,根据发射信号和回波信号脉冲前沿的时间差,就可以计算得到目标距雷达的距离。
如果要测速,就需要在中频进行处理。因为测速需要利用多普勒效应,需要获取发射频率和接收频率的频率差。视频信号已经丢失了载波信息,就无法获取频率信息了。
信号处理机
信号处理机所能处理的是数字信号,这就需要对模拟信号进行采样[奈奎斯特采样定理]。理论上,一方面我们希望采样点越少越好,同时又希望尽可能将信号对应的信息都保留下来。根据奈奎斯特采样定理,只要采样频率大于信号频率的两倍,就可以将采样得到的信号,无失真的还原回去。
终端显示设备
将雷达探测到的目标信息,以可视化的方式显示到屏幕上。
伺服系统和同步设备
伺服系统:控制天线转动,使天线指向不同角度,以探测不同方位的目标。
同步设备:雷达的频率和时间标准。产生各种频率振荡;提供统一的时钟。
四、目标参数测量
坐标系
测定目标坐标常采用球坐标系统\((R,\alpha,\beta)\),其中\(R\)代表斜距,\(\alpha\)代表方位角,\(\beta\)代表仰角
距离测量
脉冲信号测距公式:
式中 表示主波和回波之间的时间差,即延时。
若回波脉冲滞后于发射脉冲为1us的时候,对应的目标斜距为\(R=\frac{c}{2}t_{r}=150m\)
连续波信号也可以测距,但是和脉冲信号测距原理不同[调频法测距]。
角度测量
测方位角和俯仰角。
雷达测角的物理基础:
[1]电磁波是直线传播的;
[2]雷达天线具有方向性。
天线分类:
[1]有方向性天线:各向异性天线;
[2]无方向性天线:各向同性天线。
可以通过天线方向图来衡量。
天线方向图:指有方向性天线相对于无方向性天线,在某个方向上功率增加的倍数。
对于无方向性天线,到各个方向径长相等,在平面上就是一个以天线为圆心的圆。各个方向的增益都是 1。
典型雷达天线方向图如下。
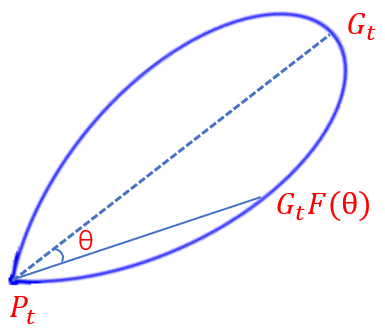
:发射机功率;
:最大增益; (增益是由天线的方向图来提供)
:与最大增益方向夹角为
的方向对应的增益;
假设 表示天线增益,则天线辐射到空间中的功率为
。
如何获得天线方向图呢?
通过测量得到。电磁场看不见,摸不着。天线哪个方向增益大,哪个方向增益弱,是在天线设计的时候通过试验测得的。
副瓣:天线方向图实际在360°方向都有值,如下图。
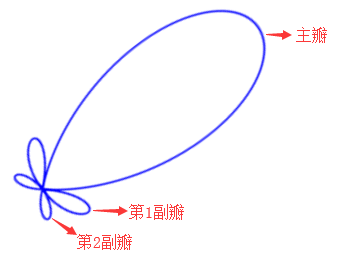
主瓣单调性:与最大增益方向夹角越大,增益越小。只在主瓣范围内有效。
第1副瓣和第2副瓣又统称为副瓣。
前面给出的是极坐标下的天线方向图,直角坐标系下的天线方向图,如下图。
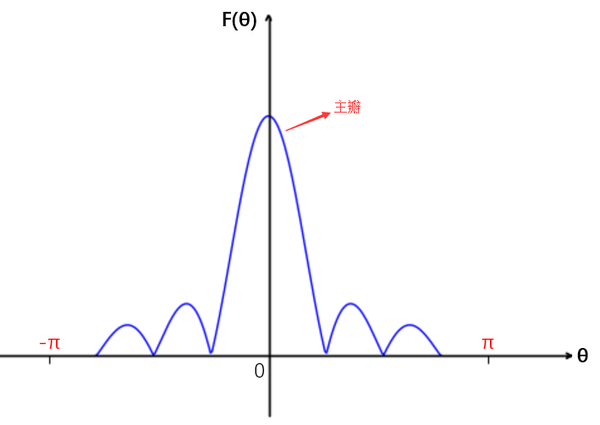
天线在某个方向上的增益是通过天线方向图来确定的。增益就是指有方向性天线相对于无方向性天线,在某个方向上功率增加的倍数。这个倍数可能大于 1 [主瓣方向],也可能小于 1 [副瓣方向]。从能量守恒的角度来讲,主瓣获得的功率增益,是以牺牲副瓣增益得到的。
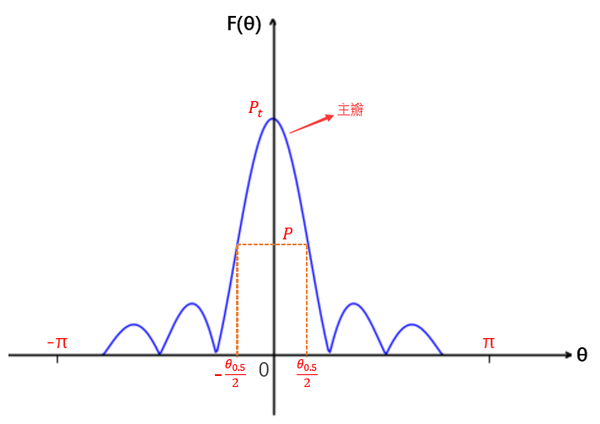
波束宽度
主瓣的宽度称为波束宽度,是衡量天线方向图胖瘦的指标。定义为主瓣功率下降到波束中央 1/2 功率处的宽度,即半功率点。用分贝表示的话,1/2 是 -3dB。因此,又称为 3dB 波束宽度。即波束宽度就是图中\(\theta_{0.5}\)
若天线作为发射用途,则天线方向图就是发射天线方向图;若天线作为接收用,则是接收天线方向图
速度测量
测速原理:利用多普勒效应。实际测量的是径向速度,目标和雷达之间必须有径向速度分量。
多普勒效应:当目标与雷达之间存在相对速度时,接收到的回波信号的载频相对于发射信号的载频会产生一个频移 。
:回波信号的频率;
:雷达发射信号的频率;
:目标相对于雷达的径向速度;
:信号波长。
频率与相位的关系:角频率 = 相位的导数
对普通连续波信号:
若目标相对于雷达不动,则雷达发射信号的频率与回波信号的频率都是\(f_{0}\),此时多普勒频率\(f_{d}=0\)
角频率为:
对于线性调频信号:
频率:
其中\(\mu\)为调谐率
频率随时间线性增加(下降),一般用于脉冲雷达。线性调频信号波形如下图。
测速公式推导
回波信号:
回波信号的相位对时间求导,就得到接收信号的频率:
其中\(f_{0}*\lambda=c\) 波长*射频=光速
所以,
其中, 为径向速度,如下图所示。
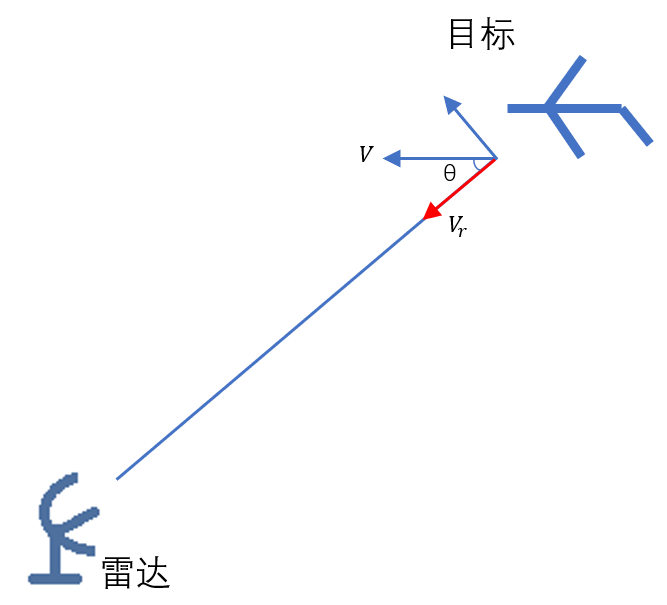
若飞机饶雷达做匀速圆周运动,则没有径向速度,此时多普勒频率也为0;所以当飞机不动或者做匀速圆周运动的时候,都测不出飞机的速度。且多普勒本身的大小可以判断径向速度是向着雷达飞行还是远离雷达飞行,若多普勒频率为正,则向着雷达飞行,若为负,则远离雷达飞行。
目标形状测量
SAR:Synthetic Aperture Radar,合成孔径雷达;
ISAR:Inverse Synthetic Aperture Radar,逆合成孔径雷达。
统称成像雷达。
SAR雷达一般装在运动的载体上,比如飞机、卫星等,对地面目标成像。google earth就是这个原理。
ISAR雷达一般在地面相对静止的载体上,对空中的飞机,海面的舰船等目标成像。

