

论文笔记:Selective Search for Object Recognition
与 Selective Search 初次见面是在著名的物体检测论文 「Rich feature hierarchies for accurate object detection and semantic segmentation」,因此,这篇论文算是阅读 R-CNN 的准备。
这篇论文的标题虽然也提到了 Object Recognition ,但就创新点而言,其实在 Selective Search 。所以,这里只简单介绍 Selective Search 的思想和算法过程,对于 Object Recognition 则不再赘述。
什么是 Selective Search
Selective Search,说的简单点,就是从图片中找出物体可能存在的区域。
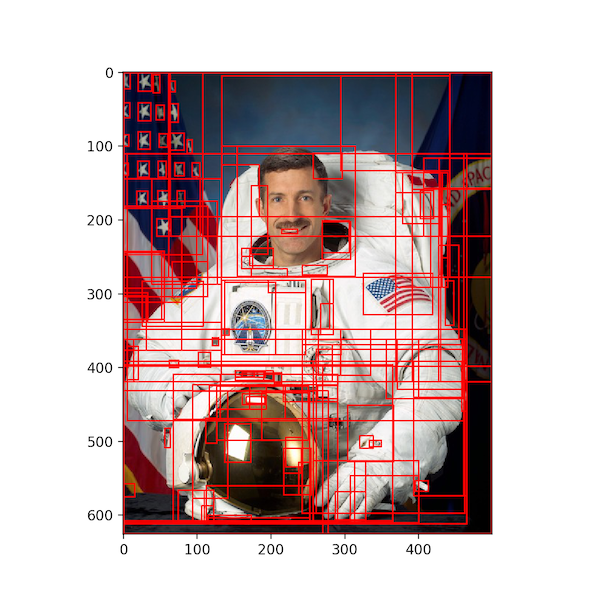
上面这幅宇航员的图片中,那些红色的框就是 Selective Search 找出来的可能存在物体的区域。
在进一步探讨它的原理之前,我们分析一下,如何判别哪些 region 属于一个物体?
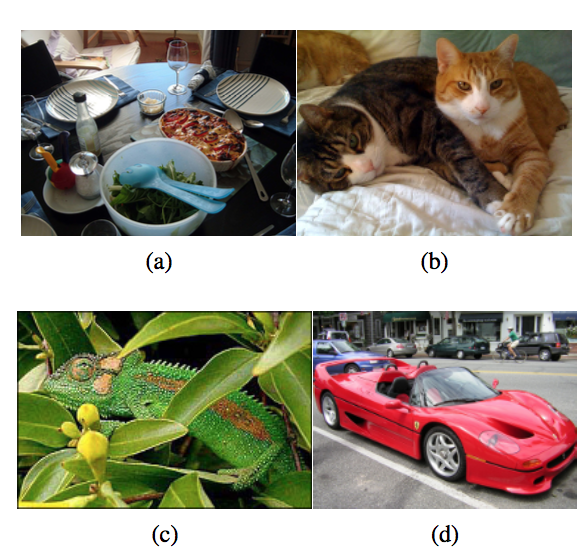
作者在论文中用以上四幅图,分别描述了四种可能的情况:
- 图 a ,物体之间可能存在层级关系,比如:碗里有个勺;
- 图 b,我们可以用颜色来分开两只猫,却没法用纹理来区分;
- 图 c,我们可以用纹理来区分变色龙,却没法用颜色来区分;
- 图 d,轮胎是车的一部分,不是因为它们颜色相近、纹理相近,而是因为轮胎包含在车上。
所以,我们没法用单一的特征来定位物体,需要综合考虑多种策略,这一点是 Selective Search 精要所在。
需要考虑的问题
在学习 Selective Search 算法之前,我曾在计算机视觉课上学到过关于物体(主要是人脸)检测的方法。通常来说,最常规也是最简单粗暴的方法,就是用不同尺寸的矩形框,一行一行地扫描整张图像,通过提取矩形框内的特征判断是否是待检测物体。这种方法的复杂度极高,所以又被称为 exhaustive search。在人脸识别中,由于使用了 Haar 特征,因此可以借助 Paul Viola 和 Michael Jones 两位大牛提出的积分图,使检测在常规时间内完成。但并不是每种特征都适用于积分图,尤其在神经网络中,积分图这种动态规划的思路就没什么作用了。
针对传统方法的不足,Selective Search 从三个角度提出了改进:
- 我们没法事先得知物体的大小,在传统方法中需要用不同尺寸的矩形框检测物体,防止遗漏。而 Selective Search 采用了一种具备层次结构的算法来解决这个问题;
- 检测的时间复杂度可能会很高。Selective Search 遵循简单即是美的原则,只负责快速地生成可能是物体的区域,而不做具体的检测;
- 另外,结合上一节提出的,采用多种先验知识来对各个区域进行简单的判别,避免一些无用的搜索,提高速度和精度。
算法框架
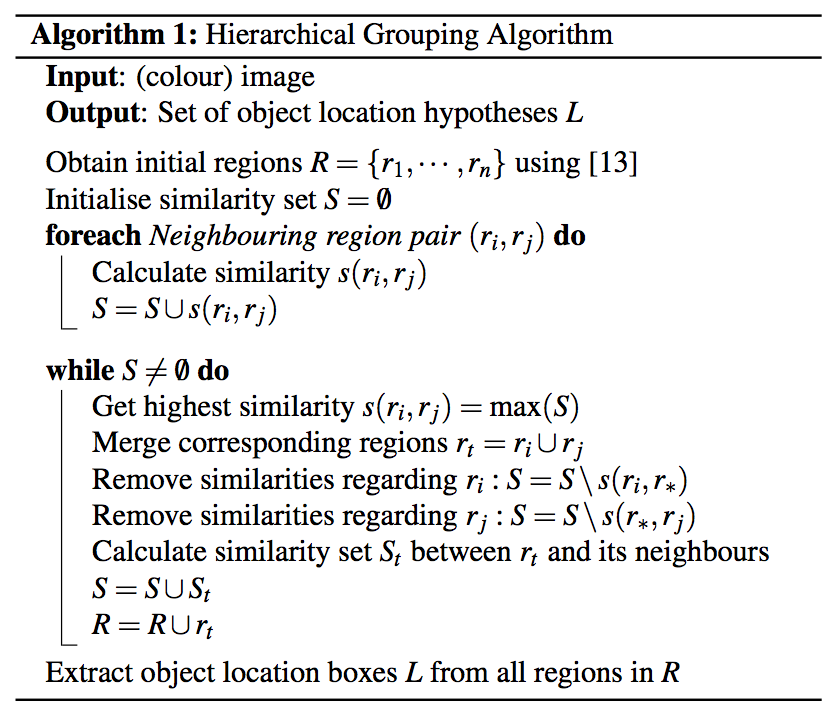
论文中给出的这个算法框架还是很详细的,这里再简单翻译一下。
- 输入:彩色图片。
- 输出:物体可能的位置,实际上是很多的矩形坐标。
- 首先,我们使用这篇论文的方法将图片初始化为很多小区域 。由于我们的重点是 Selective Search,因此我直接将该论文的算法当成一个黑盒子。
- 初始化一个相似集合为空集: 。
- 计算所有相邻区域之间的相似度(相似度函数之后会重点分析),放入集合 S 中,集合 S 保存的其实是一个区域对以及它们之间的相似度。
- 找出 S 中相似度最高的区域对,将它们合并,并从 S 中删除与它们相关的所有相似度和区域对。重新计算这个新区域与周围区域的相似度,放入集合 S 中,并将这个新合并的区域放入集合 R 中。重复这个步骤直到 S 为空。
- 从 R 中找出所有区域的 bounding box(即包围该区域的最小矩形框),这些 box 就是物体可能的区域。
另外,为了提高速度,新合并区域的 feature 可以通过之前的两个区域获得,而不必重新遍历新区域的像素点进行计算。这个 feature 会被用于计算相似度。
相似度计算方法
相似度计算方法将直接影响合并区域的顺序,进而影响到检测结果的好坏。
论文中比较了八种颜色空间的特点,在实际操作中,只选择一个颜色空间(比如:RGB 空间)进行计算。
正如一开始提出的那样,我们需要综合多种信息来判断。作者将相似度度量公式分为四个子公式,称为互补相似度测量(Complementary Similarity Measures) 。这四个子公式的值都被归一化到区间 [0, 1] 内。
1. 颜色相似度
正如本文一开始提到的,颜色是一个很重要的区分物体的因素。论文中将每个 region 的像素按不同颜色通道统计成直方图,其中,每个颜色通道的直方图为 25 bins (比如,对于 0 ~ 255 的颜色通道来说,就每隔 9(255/25=9) 个数值统计像素数量)。这样,三个通道可以得到一个 75 维的直方图向量 ,其中 n = 75。之后,我们用 L1 范数(绝对值之和)对直方图进行归一化。由直方图我们就可以计算两个区域的颜色相似度:
这个相似度其实就是计算两个区域直方图的交集。
这个颜色直方图可以在合并区域的时候,很方便地传递给下一级区域。即它们合并后的区域的直方图向量为:$$C_t=\frac{size(r_i)C_i+size(r_j)C_j}{size(r_i)+size(r_j)}$$,其中 表示区域 的面积,合并后的区域为 。
2. 纹理相似度
另一个需要考虑的因素是纹理,即图像的梯度信息。
论文中对纹理的计算采用了 SIFT-like 特征,该特征借鉴了 SIFT 的计算思路,对每个颜色通道的像素点,沿周围 8 个方向计算高斯一阶导数(),每个方向统计一个直方图(bin = 10),这样,一个颜色通道统计得到的直方图向量为 80 维,三个通道就是 240 维:,其中 n = 240。注意这个直方图要用 L1 范数归一化。然后,我们按照颜色相似度的计算思路计算两个区域的纹理相似度:
同理,合并区域后,纹理直方图可以很方便地传递到下一级区域,计算方法和颜色直方图的一模一样。
3. 尺寸相似度
在合并区域的时候,论文优先考虑小区域的合并,这种做法可以在一定程度上保证每次合并的区域面积都比较相似,防止大区域对小区域的逐步蚕食。这么做的理由也很简单,我们要均匀地在图片的每个角落生成不同尺寸的区域,作用相当于 exhaustive search 中用不同尺寸的矩形扫描图片。具体的相似度计算公式为:
其中, 表示原图片的像素数量。
4. 填充相似度
填充相似度主要用来测量两个区域之间 fit 的程度,个人觉得这一点是要解决文章最开始提出的物体之间的包含关系(比如:轮胎包含在汽车上)。在给出填充相似度的公式前,我们需要定义一个矩形区域 ,它表示包含 和 的最小的 bounding box。基于此,我们给出相似度计算公式为:
为了高效地计算 ,我们可以在计算每个 region 的时候,都保存它们的 bounding box 的位置,这样, 就可以很快地由两个区域的 bounding box 推出来。
5. 相似度计算公式
综合上面四个子公式,我们可以得到计算相似度的最终公式:
其中, 的取值为 0 或 1,表示某个相似度是否被采纳。
Combining Locations
前面我们基本完成了 Selective Search 的流程,从图片中提取出了物体可能的位置。现在,我们想完善最后一个问题,那就是给这些位置排个序。因为提取出来的矩形框数量巨大,而用户可能只需要其中的几个,这个时候我们就很有必要对这些矩形框赋予优先级,按照优先级高低返回给用户。原文中作者称这一步为 Combining Locations,我找不出合适的翻译,就姑且保留英文原文。
这个排序的方法也很简单。作者先给各个 region 一个序号,前面说了,Selective Search 是一个逐步合并的层级结构,因此,我们将覆盖整个区域的 region 的序号标记为 1,合成这个区域的两个子区域的序号为 2,以此类推。但如果仅按序号排序,会存在一个漏洞,那就是区域面积大的会排在前面,为了避免这个漏洞,作者又在每个序号前乘上一个随机数 ,通过这个新计算出来的数值,按从小到大的顺序得出 region 最终的排序结果。



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· AI 智能体引爆开源社区「GitHub 热点速览」
· C#/.NET/.NET Core技术前沿周刊 | 第 29 期(2025年3.1-3.9)
· 从HTTP原因短语缺失研究HTTP/2和HTTP/3的设计差异