SDN上机第五次作业
2019 SDN上机第五次作业
1.浏览RYU官网学习RYU控制器的安装和RYU开发入门教程,提交你对于教程代码的理解,包括但不限于:
-
1.1描述官方教程实现了一个什么样的交换机功能?
答:官方教程实现了一个将接收到的数据包发送到所有端口的交换机功能
-
1.2控制器设定交换机支持什么版本的OpenFlow?
答:控制器设定交换机支持OpenFlow 1.0
-
1.3控制器设定了交换机如何处理数据包?
答:
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER) def packet_in_handler(self, ev): msg = ev.msg dp = msg.datapath ofp = dp.ofproto ofp_parser = dp.ofproto_parser actions = [ofp_parser.OFPActionOutput(ofp.OFPP_FLOOD)] out = ofp_parser.OFPPacketOut( datapath=dp, buffer_id=msg.buffer_id,in_port=msg.in_port, actions=actions) dp.send_msg(out)如上方代码所示,新方法'packet_in_handler'已添加到L2Switch类。当Ryu收到OpenFlow packet_in消息时,将调用此方法。诀窍是“ set_ev_cls”装饰器。该装饰器告诉Ryu何时应调用装饰的函数。装饰器的第一个参数指示应调用此函数的事件类型;第二个参数指示开关的状态。
在packet_in_handler函数的前半部分:
- ev.msg是表示packet_in数据结构的对象;
- msg.dp是代表数据路径(开关)的对象;
- dp.ofproto和dp.ofproto_parser是代表Ryu和交换机协商的OpenFlow协议的对象;
在packet_in_handler函数的后半部分: - OFPActionOutput类与packet_out消息一起使用,以指定要从中发送数据包的交换机端口。该应用程序使用OFPP_FLOOD标志来指示应在所有端口上发送数据包;
- OFPPacketOut类用于构建packet_out消息;
- 如果使用OpenFlow消息类对象调用Datapath类的send_msg方法,则Ryu会生成联机数据格式并将其发送到交换机。
2.根据官方教程和提供的示例代码(SimpleSwitch.py),将具有自学习功能的交换机代码(SelfLearning.py)补充完整
-
原代码链接
完整代码:
from ryu.base import app_manager
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER
from ryu.controller.handler import set_ev_cls
from ryu.ofproto import ofproto_v1_0
from ryu.lib.mac import haddr_to_bin
from ryu.lib.packet import packet
from ryu.lib.packet import ethernet
from ryu.lib.packet import ether_types
from ryu.lib.packet import ipv4
class SimpleSwitch(app_manager.RyuApp):
# TODO define OpenFlow 1.0 version for the switch
# add your code here
OFP_VERSIONS = [ofproto_v1_0.OFP_VERSION]
def __init__(self, *args, **kwargs):
super(SimpleSwitch, self).__init__(*args, **kwargs)
self.mac_to_port = {}
def add_flow(self, datapath, in_port, dst, src, actions):
ofproto = datapath.ofproto
match = datapath.ofproto_parser.OFPMatch(
in_port=in_port,
dl_dst=haddr_to_bin(dst), dl_src=haddr_to_bin(src))
mod = datapath.ofproto_parser.OFPFlowMod(
datapath=datapath, match=match, cookie=0,
command=ofproto.OFPFC_ADD, idle_timeout=0, hard_timeout=0,
priority=ofproto.OFP_DEFAULT_PRIORITY,
flags=ofproto.OFPFF_SEND_FLOW_REM, actions=actions)
# TODO send modified message out
# add your code here
datapath.send_msg(mod)
@set_ev_cls(ofp_event.EventOFPPacketIn, MAIN_DISPATCHER)
def _packet_in_handler(self, ev):
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
pkt = packet.Packet(msg.data)
eth = pkt.get_protocol(ethernet.ethernet)
if eth.ethertype == ether_types.ETH_TYPE_LLDP:
# ignore lldp packet
return
if eth.ethertype == ether_types.ETH_TYPE_IPV6:
# ignore ipv6 packet
return
dst = eth.dst
src = eth.src
dpid = datapath.id
self.mac_to_port.setdefault(dpid, {})
self.logger.info("packet in DPID:%s MAC_SRC:%s MAC_DST:%s IN_PORT:%s", dpid, src, dst, msg.in_port)
# learn a mac address to avoid FLOOD next time.
self.mac_to_port[dpid][src] = msg.in_port
if dst in self.mac_to_port[dpid]:
out_port = self.mac_to_port[dpid][dst]
else:
out_port = ofproto.OFPP_FLOOD
# TODO define the action for output
# add your code here
actions = [datapath.ofproto_parser.OFPActionOutput(out_port)]
# install a flow to avoid packet_in next time
if out_port != ofproto.OFPP_FLOOD:
self.logger.info("add flow s:DPID:%s Match:[ MAC_SRC:%s MAC_DST:%s IN_PORT:%s ], Action:[OUT_PUT:%s] ", dpid, src, dst, msg.in_port, out_port)
self.add_flow(datapath, msg.in_port, dst, src, actions)
data = None
if msg.buffer_id == ofproto.OFP_NO_BUFFER:
data = msg.data
# TODO define the OpenFlow Packet Out
# add your code here
out = datapath.ofproto_parser.OFPPacketOut(datapath=datapath, buffer_id=msg.buffer_id, in_port=msg.in_port, actions=actions, data=data)
datapath.send_msg(out)
print ("PACKET_OUT...")
3.在mininet创建一个最简拓扑,并连接RYU控制器
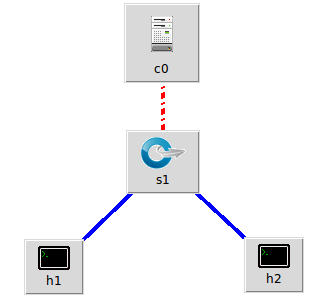
拓扑代码:
#!/usr/bin/python
#Creating Inernet Topo
from mininet.topo import Topo
class MyTopo(Topo):
def __init__(self):
# initilaize topology
Topo.__init__(self)
# add hosts and switches
h1 = self.addHost('h1')
h2 = self.addHost('h2')
s1 = self.addSwitch('s1')
# add links
self.addLink(h1, s1, 1, 1)
self.addLink(h2, s1, 1, 2)
topos = {'mytopo': (lambda: MyTopo())}

使用命令连接控制器
ryu-manager SelfLearning.py
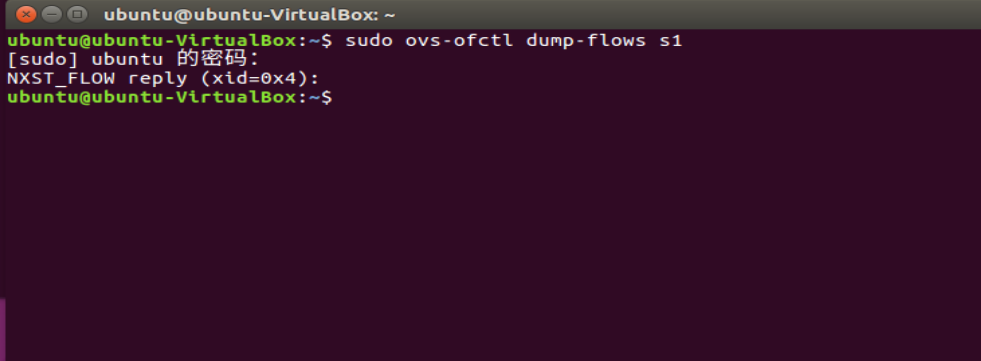
4.验证自学习交换机的功能,提交分析过程和验证结果
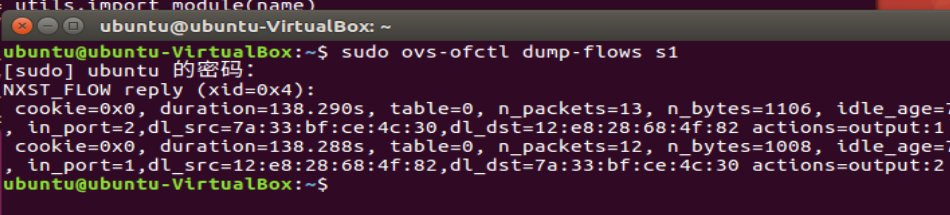
下发流表
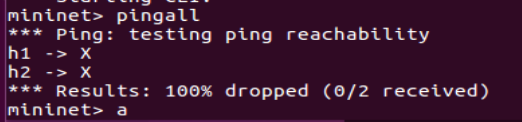
测试能否ping通
连接ryu控制器:
cd ryu
ryu-manager SelfLearning.py
再次测试pingall
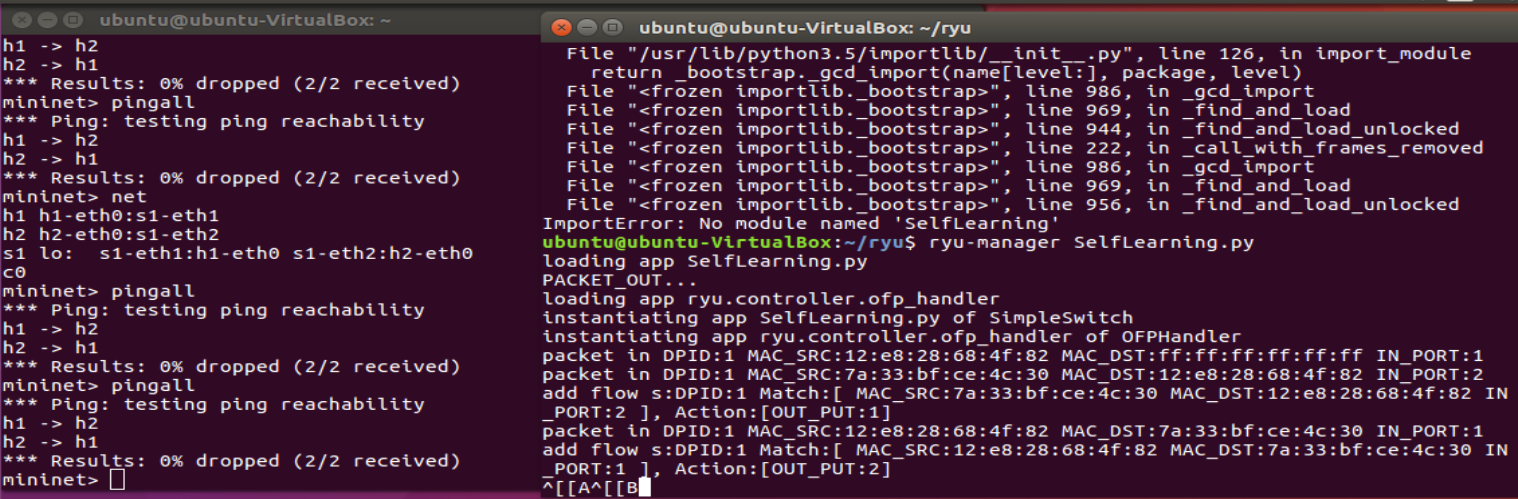
下发流表:
5.写下你的实验体会
感觉自己学的很懵,只能一步步的根据教程做

 浙公网安备 33010602011771号
浙公网安备 33010602011771号