详解Zephyr设备树(DeviceTree)与驱动模型
视频版:
1. 前言
Nordic最新的开发包NCS(nRF Connect SDK)相对于原来的nRF5 SDK来说,最大的更新莫过于采用了Zephyr系统。而Zephyr不单单是一个用来做多线程的RTOS,它更大的价值在于其自带的各种开源的协议栈、框架、软件包、驱动代码等。如果不是为了使用这些现成的协议栈和软件包,只是单纯使用RTOS,就和其他RTOS没有区别了。
Zephyr采用Kconfig对这些软件包进行管理,可以方便地使能或剪裁。而为了使Zephyr自带的硬件驱动代码能够通用,Zephyr采用了DeviceTree来描述硬件。各个半导体厂商把自己的硬件描述成标准DeviceTree,并且按照Zephyr的接口提供驱动代码,然后一起提交给Zephyr。在方便地使用Zephyr中协议栈的同时,用户还能简单方便地使用到各个半导体厂家的硬件功能,这多是一件美事。
但由于目前中文互联网上没有一个很详细的从零开始的教程,导致很多人遇到Zephyr的DeviceTree感到很厌烦:「我之前配一下寄存器、调一下库函数就能操作硬件,怎么现在搞这么复杂?」
但是相信你读完本文后,能够感受到DeviceTree的便利之处。而所谓的复杂与简单,往往是相对的。人的大脑容量有限,所以我们要不断地对做事的方法进行压缩、抽象,充分利用别人已经完成的工作成果。这也是最早从机器码发展到汇编,再到现在各种高级语言的底层逻辑。
下面正式开始。
2. 从一些习惯开始
硬件的抽象
在做传统的嵌入式C语言开发时,我们常会使用宏定义的方式来实现硬件的抽象,例如:
#include <gpio.h>
#define PORT_LED_1 GPIO_PORT_0
#define PIN_LED_1 GPIO_PIN_12
在实际的应用代码中,如果多次使用到这个GPIO,在想要修改IO的时候,只需要修改宏定义即可,而不需要把每一个用到这个IO的地方都改一遍。这种方法的优点很明显:简单直观。
理解这种简单的操作,其实就已经为理解DeviceTree做好了铺垫。
代码的解耦
大家初学代码时,一定有过想要“解耦”开发的想法:把不同的功能写进不同的文件里,封装成模块,然后在主函数里分别调用这些库即可,不同的模块之间完全解耦。
这种想法在做纯软件时是很容易的。但是,遇到硬件时,往往会遇到一些麻烦。这里举一个例子:假设我们有一个按钮和一个sensor,都需要用到GPIO以及中断,并且我们想实现代码的解耦,如下图。初始化、应用代码、中断服务函数均解耦。

看似这种解耦很美好,但是实际上是实现不了的。因为,“认为按钮和sensor之间有区别”,这完全是我们人类的观点。对于MCU来说,它都是在操作外设寄存器,按钮和sensor没什么区别。因此,gpio外设只需初始化一次,并且中断服务函数也不能定义在两处。
> 其实我们写代码,最终都是在CPU上运行,操作的都是外设寄存器,而不是板子上的LED。当我们在代码里写什么LED驱动、屏幕驱动、电机驱动的时候,只是在用面向对象的思维方便开发者(也就是我们自己)而已。CPU是不会理解什么是LED、什么是屏幕、什么是电机的,它只是勤勤恳恳按照指令执行代码,从某些地址读写数据而已。
也就是说,地址、指令和数据才是核心。牢记这一点,才不会被DeviceTree中乱七八糟的硬件节点绕晕。
实际上,现在很多成熟的SDK,简单来说是用下图这种方式进行实现的解耦:
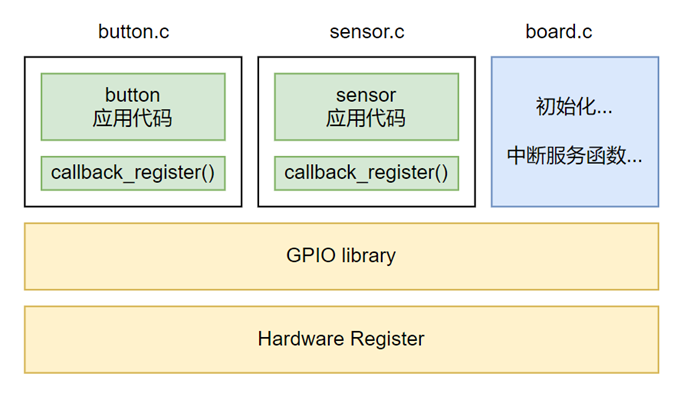
有一个专门的board.c,或者说BSP(Board Support Package,板级支持包),来处理MCU本身的硬件初始化和中断服务函数。然后,剩余的应用代码再做解耦,也可以把回调函数注册进中断服务函数中去。board.c可以说是返璞归真,真正的是在面向MCU编程,而不是面向抽象的对象编程。
DeviceTree与Zephyr驱动的引入
先说硬件的抽象,前面说的这种宏定义的方式虽然方便,但往往只是方便个人开发者,或者是一个项目内几个同事之间口口相传,没有什么规范可言。不同开发者之间定义宏的方式可能差别很大。
Zephyr不会自己再定义一套新的宏用来描述硬件,那样和各个厂商自己的SDK里的宏也没什么区别,徒增麻烦而已。Zephyr的设计思路就是:能用现成的轮子就不自己造。
因此,Zephyr引入了DeviceTree这一成熟的方案,像Linux一样,各个半导体厂商自己出DeviceTree来描述自己的产品,并且自己提供各个外设的驱动代码。用户只需调用Zephyr标准驱动,底层就会根据DeviceTree自动找到对应厂商的驱动代码,然后编译进固件中。
并且,Zephyr支持在系统初始化时就自动初始化好所有驱动。这样系统进入到Application(主线程)时,所有驱动就已经初始化好了,可以直接进行操作。用类比的说法,就是Zephr内置了所有厂商的所有外设的board.c,你只需动动手指改一下DeviceTree,就可以直接做应用开发,不需要自己写这个board.c了。
总的来说,DeviceTree是一个标准的描述硬件的方法,厂商提供了标准的DeviceTree和驱动代码。用户只需配置好DeviceTree,硬件就会自动初始化好。并且只需调用Zephyr通用驱动API,跨平台。
3. DeviceTree的结构和语法
本节参考:Introduction to devicetree — Zephyr Project Documentation
3.1. DeviceTree的层次结构
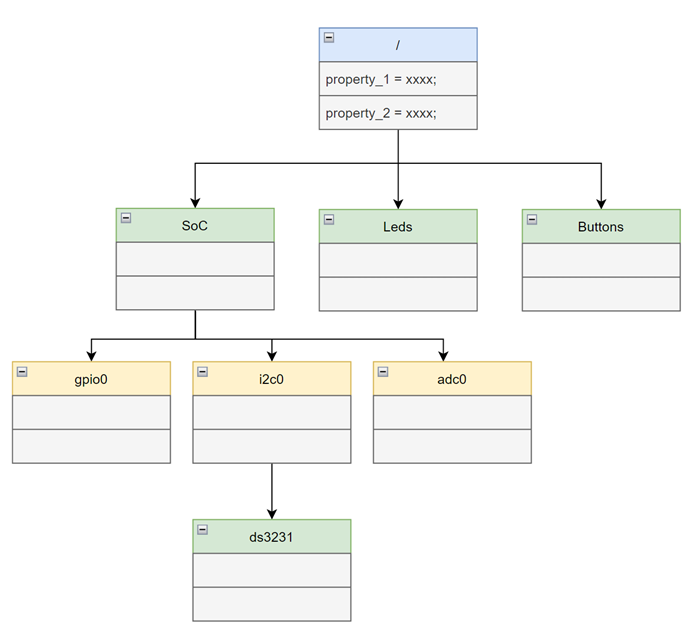
先抛开语法本身,我们先用框图的形式理解DeviceTree表达的是什么。如下图是一个示例,描述了一块板子,上面有一颗Soc、一组LED、一组按钮,还有一个I2C接口的RTC时钟ds3231。
首先,DeviceTree是一个树状结构。那么,树状结构的层次结构是由什么决定的?是什么决定了节点之间的父子关系?
答案是:首先看总线的主从关系、其次看硬件的包含关系。
具体来说,就是:
- SoC的所有外设都在ARM地址空间内可被寻址(AHB总线和APB总线),因此
gpio0、i2c0、adc0等外设节点都是SoC的子节点; ds3231RTC是i2c从机,具有i2c地址,故是i2c外设的子节点;- Button和LED虽然使用GPIO,但GPIO不是总线。并且根据前一章节所述,Button和LED对SoC来说并没有什么意义,它只是便于人类面向对象编程的。因此,这里的
Buttons和Leds就根据硬件的包含关系,直接挂在板子(也就是根节点/)下面即可; - 同理,如果有某种电压表设备用到了ADC的通道,这里,ADC的通道也不是总线,因此这个电压表设备也应该直接挂在根节点下面。
3.2. DeviceTree的适用范围
DeviceTree是为编译固件服务的,描述的是这个固件所运行的CPU,所在的板子的硬件信息。因此DeviceTree描述的是板级信息。再结合「DeviceTree的层次结构是基于总线地址的」,可以得出以下的结论:
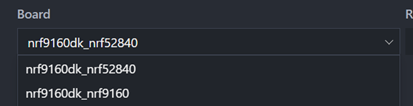
- 如果一块板子上有两颗MCU,则这两颗MCU固件编译时所采用的DeviceTree不相同。
例如nRF9160 DK上有一颗9160,还有一颗52840。在NCS中选择Board时,就有以下两个选项
- 如果一颗MCU具有两个独立运行固件的CPU,则这两颗CPU不能共用DeviceTree
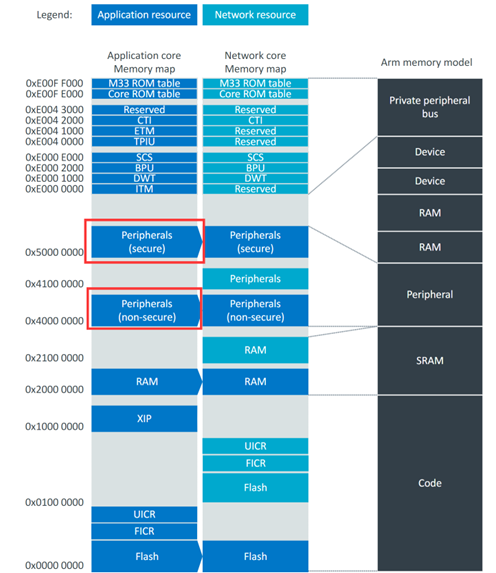
例如nRF5340,具有应用核和网络核,这两颗CPU固件独立。因此选择board时有两个选项。
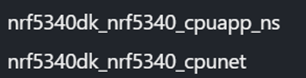
- 如果一颗CPU具有两种不同的地址空间(例如Cortex M33的安全地址空间和非安全地址空间),则这两种情况也不能共用DeviceTree
3.3. DeviceTree的语法
DeviceTree既然是一个标准,那么一定有它的标准文档,如果大家有兴趣可以去官网下载:Specifications - DeviceTree
本文就只捡重点讲:
3.1. DeviceTree基本结构示例
DeviceTree的源码称为DTS(DeviceTree Source),后缀为.dts。
/dts-v1/
/{
a-node{
a_node_label: a-sub-node {
foo = <3>;
};
another-sub-node {
foo = <3>;
bar = <&a_node_label>;
};
};
};
/dts-v1/,指明了DeviceTree的版本;- 设备树具有唯一的根节点
/; - 节点的名称写在大括号之前。如
a-node、a-sub-node和another-sub-node; - 节点的属性写在大括号内,是键值对(Key-Value Pair)的形式。如
foo = <3>;; - 子节点直接写在父节点的大括号内,从而可以表达树状的层次关系;
- 可以给节点写一个标签,例如
a_node_label,标签与节点之间用冒号:连接。
标签(Label)的意义:
- 要指明一个节点,标准的做法必须指明绝对路径,例如:
/a-node/a-sub-node。
有了标签,就可以省略路径,直接用标签表示一个节点,如a_node_label。- 标签可以被作为属性引用,让一个节点成为另一个节点的某个属性的值。注意,这里说的是成为「属性的值」,而不是成为「子节点」。
3.2. DeviceTree节点的名称
DeviceTree中的节点名称遵循以下命名规则:name@address
name:必须以字母开头。长度在1~31子节。允许大小写字母、数字、英文逗号、小数点、加号、减号、下划线;@address:称为「Unit Address」,如果节点有reg属性,则address的值必须与reg描述的第一个寄存器地址相等,可以理解为某个外设在它的总线上的首地址。如果某个节点没有reg属性,则@address必须省略。
值得一提的是,address和reg都是16进制。但address不需要写0x前缀,而reg的16进制值需要写0x前缀。
实际上,Zephyr对address有一些特殊的规则,见:Unit address
这里也说一下:
挂在SPI总线上的设备:address表示片选线(CS)的编号,如果没有片选线,则为
0;RAM:address直接为RAM的物理起始地址,如
memory@20000000,表示0x20000000;Flash:address直接为Flash的物理起始地址,如
flash@800000,表示0x08000000。Flash分区:可以在DeviceTree里存一个Flash分区表,分区的address是相对于Flash物理首地址的偏移量,如:
flash@8000000 { /* ... */ partitions { partition@0 { /* ... */ }; partition@20000 { /* ... */ }; /* ... */ }; };
几个示例:
// address必须和reg首地址相等,无论是ARM地址还是i2c地址
i2c@40003000 {
reg = <0x40003000 0x1000>;
/* ... */
ds3231@68 {
reg = <0x68>;
/* ... */
}
};
// 不带地址的节点,不含@address字段
buttons{
/* ... */
};
// 英文逗号也是name的一部分
zephyr,user {
/* ... */
};
3.3. DeviceTree的属性
DeviceTree中每个节点可以有几个属性来描述这个节点。
属性是键值对。属性的名称可以含大小写字母、数字、逗号、小数点、下划线,加号、减号、问号、"#"号。
属性是有类型的,并且,Zephyr中的属性类型和标准的DeviceTree还有一定的区别,总之是更详细了,见下表:
| 类型 | 属性示例 | 说明 |
|---|---|---|
| string | a-string="hello world!"; |
字符串 |
| string-array | a-string-array="string one","string two"."string three"; |
字符串数组 |
| int | 10进制:an-int = <1>; 16进制: an-int = <0xab>; |
32bit整数 |
| array | foo = <0xdeadbeef 1234 0>; |
整数数组 |
| uint8-array | a-byte-array = [00 01 ab]; |
字节数组,16进制,可省略0x |
| boolean | my-true-boolean; |
无值属性。值存在则表示true,不存在则表示false |
| phandle | a-phandle = <&mynode>; |
节点句柄,指向其他的节点。可以认为是一个指针(p)或句柄(handle) |
| phandles | some-phandles = <&mynode0 &mynode1 &mynode2>; |
节点句柄数组 |
| phandle-array | a-phandle-array = <&mynode0 1 2>, <&mynode1 3 4>; |
见下方详细说明 |
其实最基本的属性就是整数、布尔、字符串。以及由它们构成的数组。
phandle本质也是整数,当给一个节点赋予标签时,其实是给这个节点添加了一个隐藏属性phandle = <n>;。构建系统会确保整个DeviceTree中的n不会重复。所以这里a-phandle = <&mynode>;,&mynode的值就是这个标签指向的节点的隐藏phandle属性的值。
这里其他的都好理解,值得详细说的是phandle-array类型。其实,将其取名为「结构体数组」更加合适。这个数组的每一个元素都是一个特殊的结构体,结构体的第一个值必定是一个phandle,后续的值可以是任意值,数量也可以任意。Zephyr将这种类型用来做硬件通道的配置,例如<&gpio0 1 GPIO_INPUT>表示gpio0,1号引脚,模式为输入。后续的硬件支持章节会更详细地讲解实例。
3.4. DeviceTree的文件引用
.dts可以引用其他的.dts或.dtsi。这样板卡级dts就可以引用厂商写好的芯片级dtsi,从而减少编写dts的工作量。
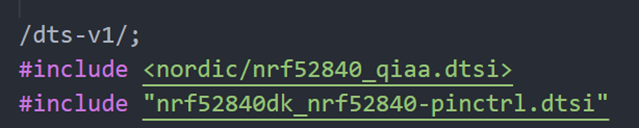
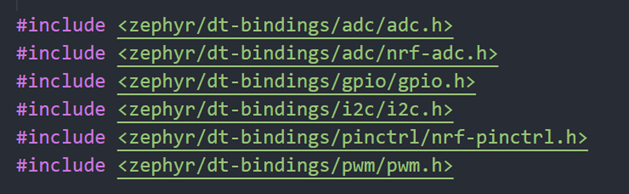
.dts也可以引用C语言头文件,从而使用里面的宏定义和枚举值:
4. Zephyr中的DeviceTree文件
在Zephyr中,在许多地方都保存的有dts文件。
首先,在NCS中创建build时,需要选择board,而板子的一系列文件中就包含了.dts文件。
4.1. dts文件
4.1.1. 芯片级dtsi文件
各个厂商提供的芯片级dtsi文件,对于nordic的产品,其dtsi文件位于${NCS}/zephyr/dts/arm/nordic/中。
4.1.2. 板卡级dts文件
各个厂商可能会推出一些开发板、评估板。这些板子的dts文件位于${NCS}/zephyr/board/arm/${board-name}/中
4.2. overlay文件
4.2.1. overlay文件的位置
在我们开发应用时,往往需要基于厂商的开发板Dts,新增一些功能,或者禁用一些功能。Zephyr提供了overlay的方式让我们可以覆写原始的板卡级dts。
在一些例程中,可以看到boards/<board>.overlay文件:
如果没有看到,说明这个例程无需修改开发板的原始dts就能实现功能。如果用户想修改,也可以自己在应用根目录创建一个app.overlay:

其实添加overlay的方式有很多,并且zephyr会按照一定的顺序找这些overlay,如果在多个地方都定义了overlay,可能zephyr只会使用其中的一部分。具体规则请看:set-devicetree-overlays。
4.2.2. overlay的使用
(1)直接在原有节点覆盖/新增属性,可以从根节点开始写:

也可以直接用label写:
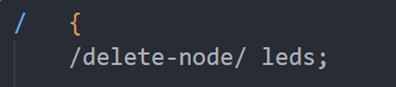
(2)删除原有的属性
(3)删除原有的节点
4.3. 完整的dts文件
每个项目构建时,编译之前,会在构建目录下生成最终的完整dts。位置为${project_folder}/build/zephyr/zephyr.dts
4.4. 最终输出
Linux的DTS会被编译为DTB,然后在启动时由Bootloader传递给kernel。但Zephyr运行在性能较差的嵌入式平台上,故不可能专门运行一个解析器去读DTB。
因此,DTS实际上实在编译时被Zephyr的构建系统(一套python脚本)变成了头文件,这个头文件的位置是:
${project_folder}/build/zephyr/include/generated/devicetree_generated.h
了解即可,实际开发不需要查看这个头文件。
5. 用DeviceTree配置硬件信息
从上一节我们可以知道,DeviceTree本身的结构和语法其实非常简单,只是规定了一个形式而已,跟硬件的配置没有任何关系。
要想了解DeviceTree是如何对硬件配置产生影响的,需要了解一些常见的属性和概念。
5.1. 标准属性
DeviceTree中有一些标准的属性,这些属性和Linux是一样的,在DeviceTree Specification中是有定义的。此处简要介绍一下:
reg, #address-cells 与 #size-cells
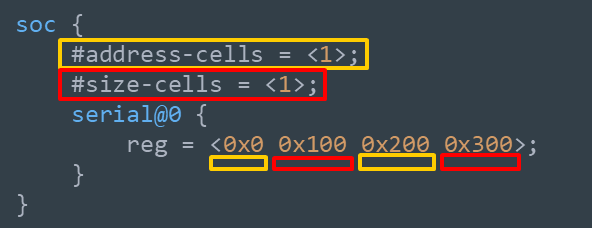
reg属性代表此节点在总线上占用的地址和范围。是由多对 (address, length)组合而成的。而#address-cells 和#sieze-cells则表示了这个总线上的节点的reg属性里,每个address和size要占用多少个uint32单元。
如上图,先看父节点soc,可以得知这条总线上,所有寄存器的address和size各占一个uint32单元。则serial有两个寄存器,第一个寄存器首地址是0x0,长度是0x100;第二个寄存器首地址是0x200,长度是0x300。
如果地址长度为64位或更多(即要占用多个Uint32单元),则reg中的写法为大端模式(Big-Endian ),即高地址在前,低地址在后。
ranges
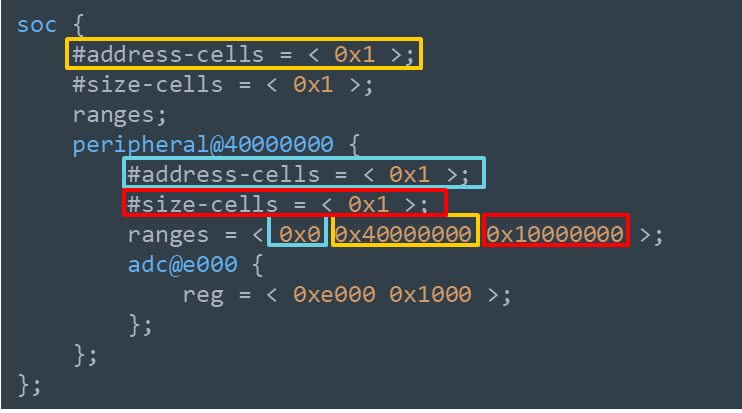
当一个节点定义了ranges属性,那么它的子节点就可以使用相对地址,而非绝对地址。
如上图。peripheral基地址为0x40000000。而ADC的地址从0xe000开始,这是一个相对地址。则ADC在ARM地址空间的绝对地址为0x4000e000。
ranges属性的格式为:
ranges = <子空间首地址 父空间首地址 长度>子空间首地址为0时,子节点的地址就是相对地址。
至于这三个元素分别要占用几个uint32单元,看图中同色的部分即可。
一般用户也用不到,了解即可。厂商才会去改芯片内部的dts。
status

status用来指定是否启用一个设备(节点),根据DeviceTree Spec有以下几个选项:
- "okay" : 设备是可操作的
- "disabled" : 设备目前是不可操作的(但未来可能可以操作,比如设备插入、安装后)
- "fail" : 设备不可操作。设备中检测到错误。
- "fail-sss":设备不可操作。其中sss的部分会根据不同的设备而变换,用于指定特定的错误码
- "reserved" : 设备可操作,但不应该使用。通常用于设备被其他软件控制的情况。
但是实际上Zephyr中基本只会用「okay」和「disabled」 ,用来启用或禁用节点。
compatible



compatible用来说明一个节点设备的兼容性。它的值是一个字符串或一个字符串数组。
Zephyr构建系统就是用它来为每个节点找到合适的驱动程序。其具体的应用后面会讲解。
compatible的每个值的通常命名方式是”vendor,device”,即某个供应商的某个产品。这不是强制的要求,也可以没有vendor。
如果compatible有多个值,zephyr会按顺序寻找驱动。会使用找到的第一个驱动。
5.2. 重要概念——域(Domain)
我们知道,DeviceTree是基于总线地址的层次结构。然而,实际的硬件之间的关系错综复杂,实为网状结构,如何才能简洁地描述好真实的硬件之间的关系呢?
其实,除了DeviceTree本身基于地址的树之外,在逻辑上,还存在一些其他的树,例如GPIO树、中断树、ADC树等等。
我们将这种附加在DeviceTree上的,逻辑上的树称为域(Domain)。如下图,蓝色为一个按照总线地址的层次结构写好的DeviceTree,但是,在这个树上其实附加了其他的包含关系:
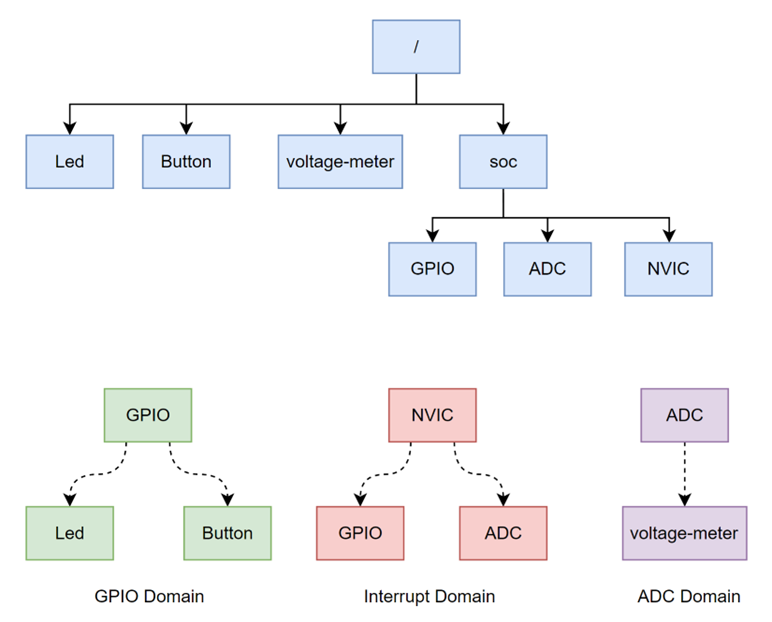
很容易发现,每个域都有一个自己的“根节点”,称为控制器(Controller)。不难发现,其实控制器才是真正的我们编程操作的对象,而域中的子节点,都是我们为了方便理解,而抽象出来的概念,这与本文第2章节的观点是一致的。
域的控制器与子节点
控制器节点通常会有一个布尔类型属性 *-controller,来表示自己是某个域的控制器,如下图:
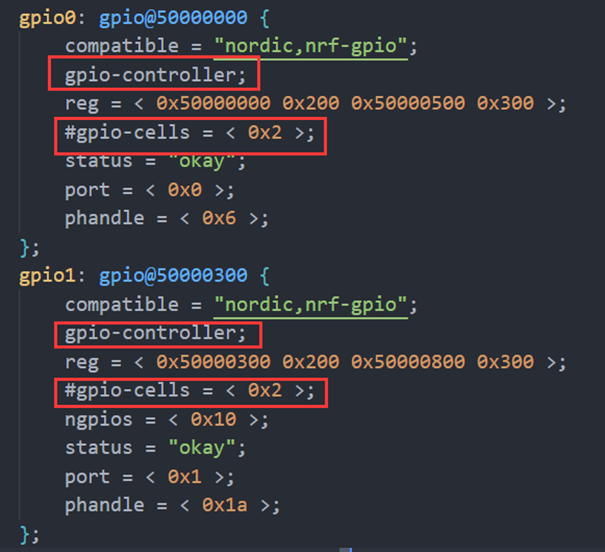
而域中的子节点,就可以使用phandle-array类型的属性来说明自己属于哪个域。此属性的第一个值是指向控制器的句柄。后续的值是此节点在这个域中的配置。这一条配置被称为specifier。
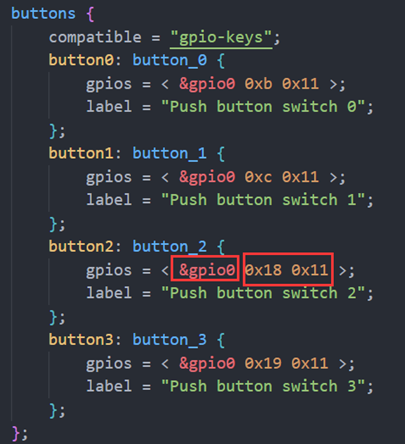
控制器节点中会有一个#*-cells属性来指明specifier的大小,需要占用多少个uint32单元。
中断域
中断域和GPIO域有点类似,但有点区别:
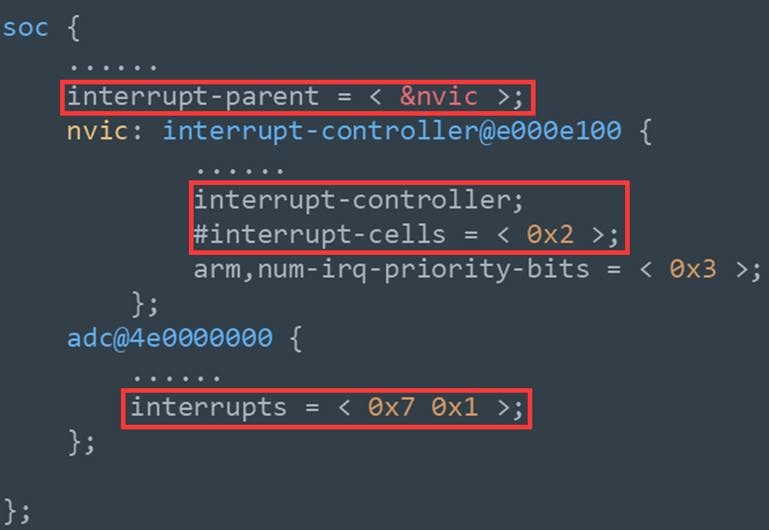
首先,我们发现adc的interrupts属性只写了specifier,并没有写controller指向哪里。
这是因为,根据DeviceTree标准,构建系统默认把devicetree父节点当作中断域的controller。如果父节点不是controller,则继续向上寻找。直到遇到controller,或者遇到interrupt-parent属性时,才会指定父节点。
如图可以看出,adc节点向上寻找,遇到soc节点,在soc节点内,指明了其中断域控制器是nvic。于是adc节点中断域的控制器就是nvic。
其他类似的域
类似的还有adc域、pwm域、pin-ctrl域等等。这些域的子节点也都采用了specifier的方式,来记录配置信息:

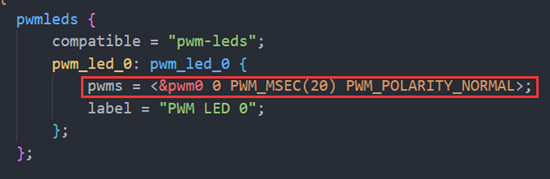
不过,这里没有*-controller属性来指明controller节点。
这些域的控制器的写法,可能有细小的差别,但是背后的道理是相通的。用户也不用关心控制器具体的写法,按照手册写好子节点即可。
域的总结
总之,对于初学者,这里只需记住「specifier是用来写配置的」即可,后面会讲到具体的用法。
5.3. DeviceBinding
前面讲到域的概念,我们会发现不同的域的配置方法有一些共性,但也有一些差异,这让我们感觉devicetree的规则很混乱:
“除了dts本身的语法之外,竟然还有其他的规则,一个不小心就会写错!”
我想说,规则是双刃剑。既可以说规则带来了麻烦(提高了门槛),又可以说规则创造了便利(在配置时就提前检查dts是否正确,防止编译的时候出错,那时候更难排查)。
这里的便利性还体现在VS Code编辑器的代码提示与自动补全,这是Nordic提供的nRF Connect for VS Code插件实现的:

DeviceBinding文件
所谓的规则,被称为Device Binding文件。binding文件是yaml格式文件,yaml是标记语言,由多组键值对组成。每个值可以是:
- 纯量(单个不可分割的值,如整数、字符串)
- 对象(把键值对当成值)
- 数组(一组同类型的值)
示例:
简易语法:
- 键、值之间用冒号+空格分隔
- yaml的层级关系只看缩进(类似python),相同层级的缩进必须相同
- 数组元素可以是纯量、对象。对象的成员也可以有数组
可能新手会感觉很麻烦,又冒出来一种语法。但是其实用户无需有畏难情绪,因为这些内容都是使开发更简单,而不是更麻烦的。bingding文件本身的可读性很强,用户只需要能大概看懂即可,编写yaml文件是厂商的工作。
binding和DeviceTree中的节点,是通过compatible属性实现联动的。在VS Code中直接Ctrl+鼠标左键点击compatible,就可以跳转到对应的binding文件中:
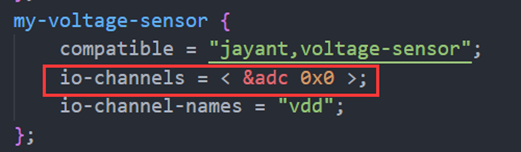
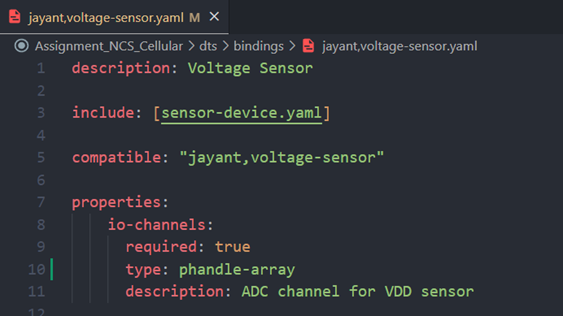
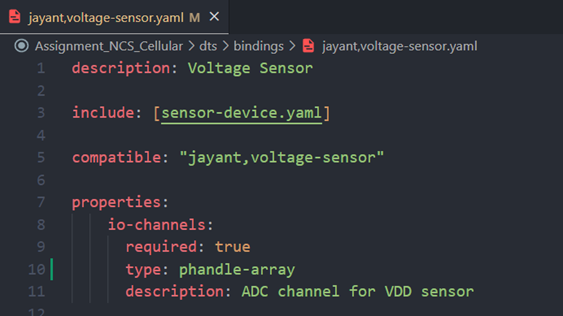
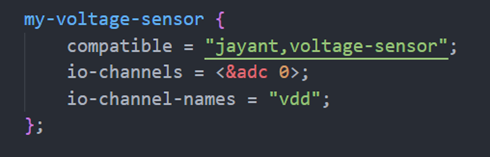
DeviceTree中节点的属性,必须严格按照binding文件中的要求。如下图,我自定义了一个电压传感器设备,需要用到ADC。那么我在binding文件中,要求符合compatible = "jayant,voltage-sensor"的所有节点,都必须具有io-channels属性,且类型必须是phandle-array。从而使得这个节点可以通过写specifier的方式,把自己加入到ADC域中:
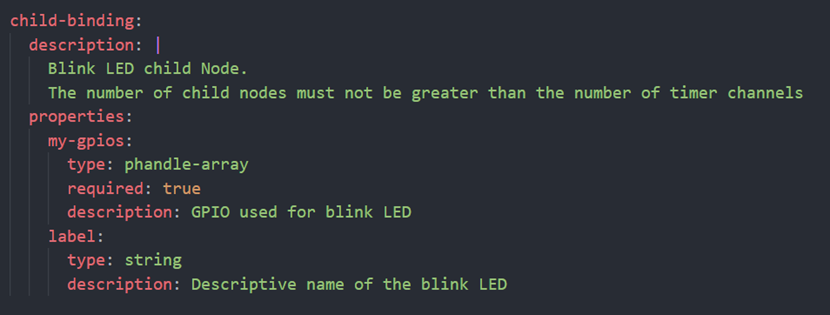
device binding的约束能力很强大,不仅可以约束节点的属性(指定数据的类型、枚举、甚至强行赋值),还可以约束此compatible节点的子节点的属性。
此外,还能给specifier中记录的数值赋予含义。

由于内容较多,本文不多赘述,可参考Devicetree bindings — Zephyr Project Documentation了解更多信息。大家在实际开发过程中,直接通过Ctrl + 鼠标左键跳进binding文件,然后望文生义即可。
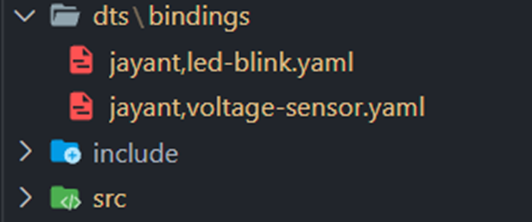
DeviceBinding文件的位置
zephyr build system会从以下位置寻找binding文件:
${NCS}/zephyr/dts/bindings/${board_dir}/dts/bindings/${project_dir}/dts/bindings/
也可以在CMakeLists.txt中,用 list(APPEND DTS_ROOT /path/to/your/dts) 命令增加binding文件的目录
也可以在编译时,增加选项 west build -b <board_name> -- -DTS_ROOT=<path/to/your/dts>
如果想要自定义设备类型,可以把yaml文件添加到以上位置。文件名推荐和compatible一致,但不是必须的。
如下图为我自己写的两个bingding文件的位置示例:
5.4. 特殊节点
在5.1种描述了一些常见的属性。本节会描述一些常见的特殊节点。这些节点都是虚拟的,不是实际存在的硬件:
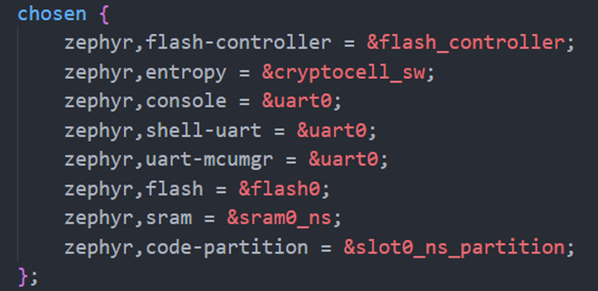
-
/chosen:为Zephyr Kernel选择特定设备(如日志串口);
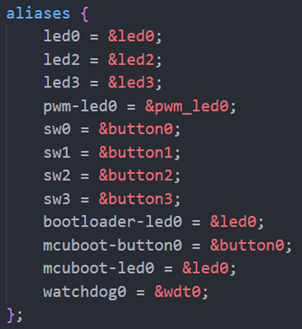
-
/aliases:给节点起一个别名,类似label。不过label仍是节点,而aliases中的别名是属性名。/aliases通常是厂商在开发板级的驱动代码中操作硬件所需要的。
-
/pinctrl:直属于根节点,不属于soc的一个虚拟节点,用于管理数字IO的复用(目前不管模拟IO,因为ADC的模拟通道和MCU的硬件引脚往往是绑定死的,不能配置);
具体的介绍,我后续会写一篇文章专门讲解。大家可以直接Ctrl + 鼠标左键点击dts文件中的pin-ctrl,跳转过去,也能自己看懂。 -
/zephyr,user:方便用户开发的节点,此节点无需compatible属性。用户可以直接在里面随便写各种specifier、自定义属性等。于是就可以直接在代码里操作GPIO通道、ADC通道、pwm通道等,或者把自己随便写的配置项读出。这免去了如果自定义一个device,还要自己写binding的麻烦。

6. 在C代码中访问DeviceTree内容
在4.4小节中,已经介绍过,DeviceTree最终会用来生成devicetree_generated.h头文件,包含了DeviceTree中的所有信息。自然而然的,我们会想到要在C/C++代码中访问这些信息。
注意,由于DeviceTree中节点名称、属性名称允许使用的字符集是比C语言变量命名所允许的字符集更广泛的,因此,Zephyr规定,在C语言中访问DeviceTree的内容时,名称内的字母全部都变成小写字母、且特殊符号都变成下划线。
例如
zephyr,user变为zephyr_user;my-gpio变为my_gpio。
我们无需关心devicetree_generated.h文件本身的内容,因为它不是给人看的,需要使用一套宏函数来将其读出。在需要操作DeviceTree的文件中包含以下头文件:
#include <zephyr/devicetree.h>
这里给出一个示例:
- 在overlay文件中新增一个属性,表示自己需要一个GPIO进行测试,属性名称为
test-gpios。这是一个gpio specifier。
/{
zephyr,user {
test-gpios = <&gpio0 17 0>;
};
};
- 在
main.c中,获取这个specifier,并操作GPIO
#include <zephyr/drivers/gpio.h>
// 自己想要操作的节点的id,这里想要操作的节点是zephyr,user
#define NODE_ID DT_PATH(zephyr_user)
// 获取到zephyr,user节点的test-gpios属性,并把它作为gpio specifier,读入GPIO驱动。
static const struct gpio_dt_spec test_io = GPIO_DT_SPEC_GET(NODE_ID, test_gpios);
// 实际代码
int main()
{
// 判断设备(这里是gpio控制器)是否已初始化完毕
// 一般情况下,在application运行前,zephyr驱动就已经把控制器初始化好了
if (!device_is_ready(test_io.port)) {
return;
}
// 重新配置IO
// 如果DeviceTree里写好了,这里也可以不配
gpio_pin_configure_dt(&test_io, GPIO_OUTPUT_INACTIVE);
// 操作IO
gpio_pin_set_dt(&test_io,1);
gpio_pin_set_dt(&test_io,0);
return 0;
}
6.1. 获取节点ID
DeviceTree的一切信息都包含在属性之中。要想获得属性,首先要获得节点ID(node identifier)来作为句柄。获得节点id的方式有很多:
| 获取方式 | 示例 | 说明 |
|---|---|---|
| 根节点 | DT_ROOT |
根节点id |
| 绝对路径 | DT_PATH(soc, serial_40001000) |
/soc/serial@40001000 |
| Label | DT_NODELABEL(serial1) |
根据dts中定义的label来找到节点 |
| chosen节点 | DT_CHOSEN(zephyr_console) |
根据dts中chosen节点的配置: zephyr,console=&uart0 |
获得节点id的方式还有很多:通过父节点找子节点、通过子节点找父节点等等。详细不多赘述,可参考:
https://docs.zephyrproject.org/latest/build/dts/api-usage.html#node-identifiers
但是有一种方式需要注意,它与最后一节讲的Zephyr驱动自动初始化息息相关。那就是通过实例ID的方式获取节点ID。所谓实例,就是指,同一个compatible,可能在一个dts中有多个实体。比如nordic,nrf-timer,可能一颗MCU上有很多timer。把它们按照在dts中出现的顺序进行编号,就是实例ID。实例ID从0开始。
比如:DT_INST(0, nordic_nrf_timer),对应的就是nordic,nrf-timer的第0个实例节点。
通过实例ID获取节点ID的好处在于,可以通过遍历的方式来一次性获取到同一个compatible下所有的节点。这正是Zephyr能够在Application运行前就能找到所有dts中配置好的硬件的基础。
注意,所有Device Tree API都是宏,是预编译的结果。因此:
- API参数必须是常量。不能在
for(int i=0;i<n;++i)的运行时循环中用变量i去调用INST的API;- 调用API的过程也必须在编译时就完成。也就是说API宏的返回值只能赋值给const变量,不能在运行时调用,赋值给非const的任何变量。
6.2. 获取属性
利用DeviceTree API,输入节点id和属性名称,就可以获得属性。
检查属性是否存在
使用node id和小写、下划线命名的属性名称
示例:查找i2c1节点的clock-frequency属性。
DT_NODE_HAS_PROP(DT_NODELABEL(i2c1), clock_frequency) /* 宏展开为 1 */
DT_NODE_HAS_PROP(DT_NODELABEL(i2c1), not_a_property) /* 宏展开为 0 */
DTS里允许的所有特殊符号
「-」 「,」 「#」 「@」在C源码里都要变成「_」,且字母都要变成小写。
如果是布尔类型,直接使用下面介绍的
DT_PROP()即可。不要再使用DT_HAS_PROP()判断其是否存在。
获取普通属性
整数、布尔、字符串、数组、字符串数组都是普通属性,用DT_PROP(node_id)读取。
整数与字符串示例:
DT_PROP(DT_PATH(soc, i2c_40002000), clock_frequency) /* 宏展开为 100000, */
#define I2C1 DT_NODELABEL(i2c1)
DT_PROP(I2C1, status) /* 宏展开为 "okay" */
数组示例:
假设dts为
foo: foo@1234 {
a = <1000 2000 3000>; /* array */
b = [aa bb cc dd]; /* uint8-array */
c = "bar", "baz"; /* string-array */
};
则C代码中可以写作:
#define FOO DT_NODELABEL(foo)
int a[] = DT_PROP(FOO, a); /* {1000, 2000, 3000} */
unsigned char b[] = DT_PROP(FOO, b); /* {0xaa, 0xbb, 0xcc, 0xdd} */
char* c[] = DT_PROP(FOO, c); /* {"foo", "bar"} */
// 获取数组的长度
size_t a_len = DT_PROP_LEN(FOO, a); /* 3 */
size_t b_len = DT_PROP_LEN(FOO, b); /* 4 */
size_t c_len = DT_PROP_LEN(FOO, c); /* 2 */
读取reg属性
-
获取reg blocks数量:
DT_NUM_REGS(node_id) -
若只有1个block,则直接读取其地址和长度:
-
DT_REG_ADDR(node_id) -
DT_REG_SIZE(node_id)
-
-
若有多个block,则需要通过下标来索引
DT_REG_ADDR_BY_IDX(node_id, idx)DT_REG_SIZE_BY_IDX(node_id, idx)
注意,node_id和idx都必须是常量。因为宏的值在编译时就已经展开,因此不能放在循环里运行。
读取interrupts属性
-
获取interrupt specifier数量:
DT_NUM_IRQS(node_id) -
获取interrupt specifier:通过node id,下标和val来访问中断配置
DT_IRQ_BY_IDX(node_id, idx, val)
val的含义:
是中断控制器devicebind文件中规定的结构体成员名。
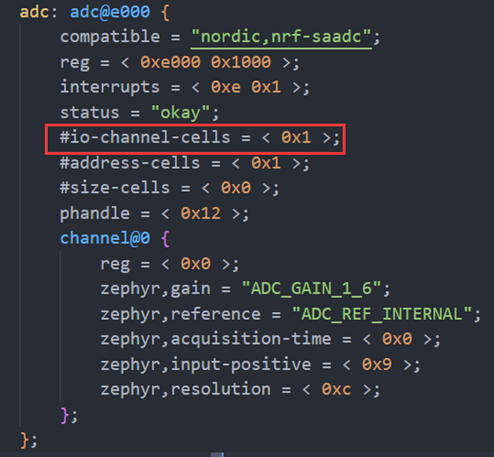
以设备树中的
/soc/peripheral/adc@e000节点为例,节点中未指明interrupt parent,故从设备树向上推断,推到/soc节点,此节点指明中断控制器是&nivc,即/soc/interrupt-cntroller@e000e100,其device-binding是"arm,v8m-nvic"。 在
ncs/zephyr/dts/bindings/interrupt-controller/"arm,v8m-nvic.yaml"文件中,指明了interrupt specifier的解析方式:interrupt-cells: - irq - priority所以,
adc节点中的:interrupts = < 0xe 0x1 >;可被解析为:
#define ADC_NODE DT_NODELABEL(adc) int irq = DT_IRQ_BY_IDX(ADC_NODE, 0, irq) // 中断号是0xe int priority = DT_IRQ_BY_IDX(ADC_NODE, 0, priority) // 优先级是priority
读取phandle属性
例如,dts中有:
n1: node-1 {
foo = <&n2 &n3>;
};
n2: node-2 { ... };
n3: node-3 { ... };
则可在C代码中,通过n1节点找到另外两个节点的node id:
#define N1 DT_NODELABEL(n1)\
DT_PHANDLE_BY_IDX(N1, foo, 0) // node identifier for node-2
DT_PHANDLE_BY_IDX(N1, foo, 1) // node identifier for node-3
6.3. 遍历宏
前面提到,DeviceTree API都是宏,不能在代码运行时用循环语句(for和while)来调用。但是DeviceTree API提供了遍历展开宏。如:
- 对设备树中的每一个节点都调用宏函数
fn
- 对设备树中的每一个status为okay的节点调用宏函数
fn

- 对一个节点的所有子节点遍历调用宏函数
fn

更多遍历API,请参考: https://docs.zephyrproject.org/latest/build/dts/api/api.html#for-each-macros
这些API看似是循环,实际上是在预编译时,把所有遍历的可能性全部展开。
实际上Nordic提供的很多Zephyr驱动,都是用遍历宏来创建外设相关的变量(例如config结构体),从而能调用nrfx api来完成实际的初始化。
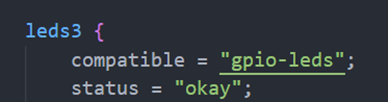
举一个实际的例子,在${NCS}/zephyr/drivers/led/led_gpio.c中,定义了:
#define DT_DRV_COMPAT gpio_leds
有了这个定义,就可以使用Inst API来访问compatible = "gpio-leds"的所有led,如下:
leds0 {
compatible = "gpio-leds";
status = "okay";
label = "LED1";
led0: led_0 {
gpios = <&gpio0 4 0>;
label = "Green LED 1";
};
};
leds1 {
compatible = "gpio-leds";
status = "okay";
label = "LED2";
led1: led_1 {
gpios = <&gpio0 5 0>;
label = "Green LED 2";
};
};
DT_DRV_INST(0)表示led0的Node ID,等价于DT_INST(0, gpio_leds)
DT_DRV_INST(1)表示led1的Node ID,等价于DT_INST(1, gpio_leds)
因为
devicetree.h中,有#define DT_DRV_INST(inst) DT_INST(inst, DT_DRV_COMPAT)
Inst API提供了基于下标的访问DeviceTree节点的方式。
接下来,下图用宏函数的方式定义了一个代码模板,内部定义了led 驱动程序所需的变量、device结构体等。所有内部调用的宏函数都是基于实例ID的INST API。
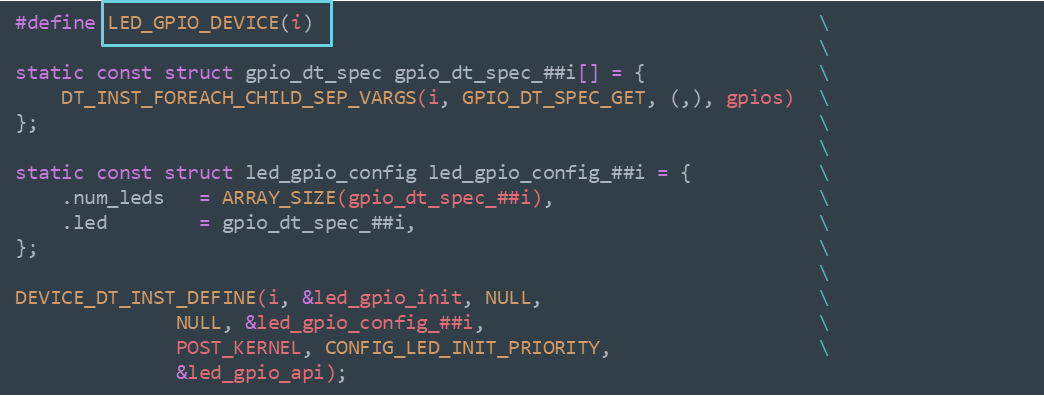
最后,用遍历宏调用了前面的代码模板。这个遍历宏的效果是:对所有status="okay",且compatible="gpio-leds"的节点,执行一次上面的宏函数。
zephyr就是用这种方式,在驱动代码中自动遍历所有status="okay"的节点,提取其信息,然后用遍历宏来定义驱动结构体,在kernel启动之前就把硬件的初始化给完成。
6.4. specifier硬件支持
Device Tree API 中还有很多硬件支持的宏,方便你直接读取specifier等。具体可参考:
https://docs.zephyrproject.org/latest/build/dts/api/api.html#hardware-specific-apis
https://docs.zephyrproject.org/latest/hardware/index.html
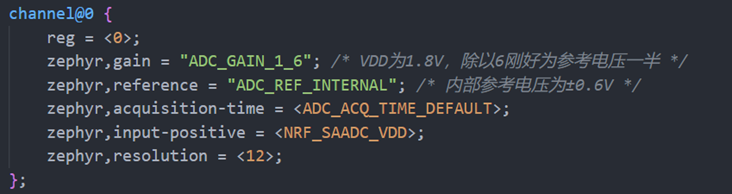
这里以ADC的硬件支持宏为例。例如,一个节点为:
使用ADC_DT_SPEC_GET_BY_IDX(node_id, idx),就会展开为:
{
.dev = xxxx,
.channel_id = xxxx,
.channel_cfg = xxx,
.vref_mv = xxxxx,
/*...*/
}
刚好和zephyr的adc驱动中定义的adc channel结构体的成员一致
这就是为什么我们可以直接写:
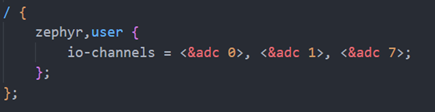
const struct adc_dt_spec my_adc_channel_0 = ADC_DT_SPEC_GET_BY_IDX(zephyr_user, 0);
const struct adc_dt_spec my_adc_channel_1 = ADC_DT_SPEC_GET_BY_IDX(zephyr_user, 1);
const struct adc_dt_spec my_adc_channel_2 = ADC_DT_SPEC_GET_BY_IDX(zephyr_user, 2);
如果用上前面说的遍历宏,还能更加简单,直接生成数组:
// 给一个specifier对应的大括号末尾加上逗号
#define DT_SPEC_AND_COMMA(node_id, prop, idx) \
ADC_DT_SPEC_GET_BY_IDX(node_id, idx), // <--逗号加在这里
// 使用遍历宏直接把所有specifier读进数组
// 这些宏展开后相当于三个结构体初始化大括号,中间用逗号分隔
static const struct adc_dt_spec adc_channels[] = {
DT_FOREACH_PROP_ELEM(DT_PATH(zephyr_user),
io_channels,
DT_SPEC_AND_COMMA)
};
7. Zephyr Driver的实现方式
什么是驱动程序?
驱动程序是面向对象的。首先要有一个被操作的对象,然后才有驱动程序。这个被操作的对象就是 device结构体。 device结构体本身是抽象的,没有具体的含义:
struct device {
const char *name; // 设备的名称
const void *config; // 设备的初始配置
const void *api; // 设备的api函数集合
struct device_state *state; // 设备的工作状态
void *data; // 设备的运行数据
/* ... */ // 其他参数,例如电源管理,后续有专门文章讲解
};
驱动程序在Appilication程序运行之前,就把硬件初始化做好,然后定义好device结构体的内容。下图中的五个红色的主要级别都是可以定义驱动程序初始化的时间,每个级别内还可以再细分优先级。

在Application中如何拿到Device结构体?
如果说,zephyr在系统初始化阶段就能把所有device结构体定义好。那么Application运行后,要如何拿到这些device呢?
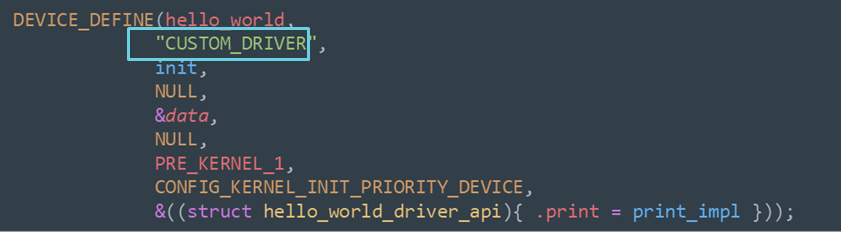
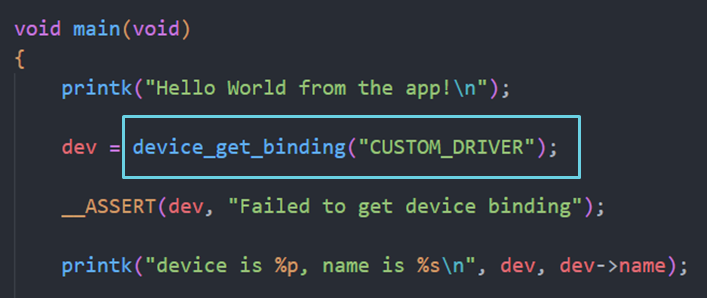
(1)通过Name的方式
这种方式,可以与DeviceTree完全无关。可以自己定义一个与DeviceTree无关的纯软件设备,也可以编写驱动程序。
例程:${NCS}/zephyr/samples/application_development/out_of_tree_driver 中,介绍了out of tree driver的写法。
(2)通过DeviceTree的方式
在驱动程序中,通过DEVICE_DT_DEFINE(),定义了device结构体,并与DeviceTree中的节点绑定:

在Application中,通过DEVICE_DT_GET(node_id) 宏来获得这个device结构体

Kconfig与DeviceTree
我们修改prj.config中的CONFIG_XXXX选项、修改dts中的status属性,其本质是在做什么?


综合前面介绍的device tree、遍历宏的内容,我们可以知道:
- 修改driver相关的config选项,其本质是让CMake把驱动程序包含进来。只要启用了相关config,驱动程序就会载入,固件就会变大。
- 修改status为”okay”,其本质是,让驱动程序在使用遍历宏创建device结构体时,能够为这个okay的节点创建device对象。
只有两者都启用,硬件节点才真正的被驱动了,application中才能真正的操作这个节点。
Zephyr标准驱动
Zephyr是一个跨平台的操作系统,自然少不了对各类标准硬件的跨平台支持。
详见:https://docs.zephyrproject.org/latest/hardware/peripherals/index.html

这里以Counter为例:
在Zephyr中,Timer指的是内核软定时器,而Counter指硬件定时器
在zephyr/include/zephyr/drivers/counter.h中,规定了zephyr标准的counter应该具有哪些api。
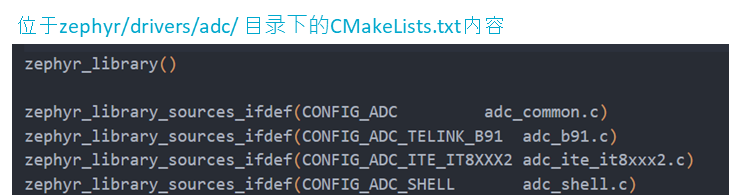
在zephyr/drivers/counter/目录下,有各个厂商对自家MCU产品写好的timer驱动,全部都符合zephyr标准的API。
在Kconfig中启用counter驱动时,zephyr build system就会自动把板子对应厂商的counter驱动编译进来。

Zephyr标准驱动支持硬件的全功能吗?
很遗憾,答案是不能。Zephyr只支持最基础、最标准的硬件驱动,不支持各个厂商的硬件特性。
例如nrf系列的PPI,非常方便,zephyr没有为PPI提供标准驱动,因为其他厂商平台并没有这个功能,所以是不可能有「device tree里写一下配置,PPI就自动连好了」这种操作的。Nordic外设的SHORT寄存器也是同理。
下面是一段混合代码:
- 前半部分,zephyr标准已经自动初始化好timer0,所以可以用counter api,配置计时;
- 后半部分,利用nrfx api,来连接short寄存器,让timer0计时结束后,自动触发clear。
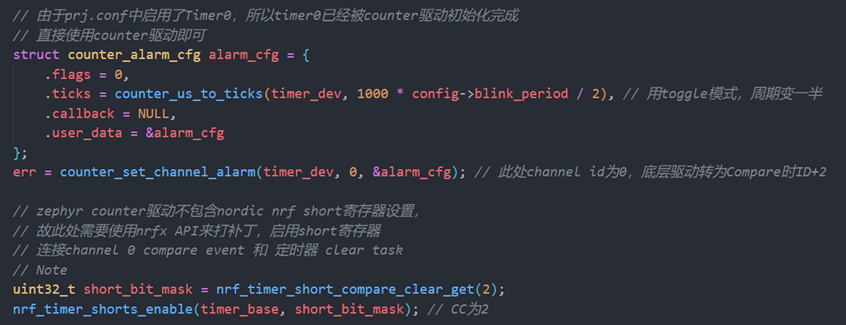
这里还有个注意事项:
nrf timer本身没有overflow事件,所以把channel 0拿去设置top value了;此外,还把channel 1拿去做输入捕获了。 因此,nrf timer暴露给zephyr标准驱动的通道就少了两个,实际上zephyr counter的通道0,是硬件定时器的通道2。
8. 总结
- DeviceTree描述的是板卡级的硬件信息。DeviceTree是树型逻辑结构,层次关系是由总线的主从关系,以及硬件的包含关系决定的 。
- DeviceTree的基本单元是节点(Node),节点具有一个名称和多条属性。可以给节点增加标签(label),来便于引用这个节点。
- 板卡级的dts文件可以引用芯片级的dtsi文件,也可以引用.h头文件,从而使用其定义的枚举值和宏。
- 用户可以在自己的工程里通过写overlay的方式,来覆写原始board dts里的配置
- Zephyr Build System在构建时会合并所有的dts以及overlay,生成最终的zephyr.dts,并导出为devicetree_generated.h头文件
- DeviceTree本身的语法只提供了一个基于总线主从关系的树形层次结构,此外每个节点可以用属性来存储信息。语法本身并没有规定硬件要如何描述。DeviceTree中的一些常见属性,补充了这方面的空缺。
- reg、ranges、#address-cells、#size-cells这四个属性描述了总线上的地址分布
- status属性描述了设备是否使能
- compatible属性描述了设备的兼容性
- 在DeviceTree中,除了本身的树形结构以外,还具有一些逻辑上的树形结构,称为域。域具有控制器和设备节点,控制器是真正实现域的功能的硬件外设,而设备节点只是为了开发方便解耦而进行的一种抽象。
- 真正限制device tree中属性该如何写的,是device binding文件。binding文件是芯片厂商提供的。有了binding文件,就可以在VS Code中实现自动的检查与补全。Zephyr实际构建项目时,也是参考binding文件来检查dts的正确性。只有dts按照正确的规则写了,zephyr的驱动代码才能识别到硬件配置,进行自动初始化。
- zephyr中会有一些特殊的虚拟节点来为开发提供便利。
- 要从C语言中访问DeviceTree中的信息,需要先获得node id。用绝对路径、label、chosen、alias等许多方法都可以获取一个节点的node id。其中要注意的是通过实例id的方法(INST)
- 有了node id,就可以获取node的属性。普通的属性与reg、phandle、interrupt属性的获取API不相同。
- zephyr还提供了遍历宏,从而可以针对特定条件的节点/属性遍历执行宏函数。
- Zephyr用前面提到的通用API,封装出了各种硬件支持API,方便直接读取各种硬件指定的specifier。
- Zephyr驱动程序,在Application运行之前就会执行初始化,并且定义device结构体。
- Application可以通过Name或者Node id的方式,获得device结构体
- 我们在Kconfig中使能driver,本质上是载入了驱动程序,固件会变大。在dts中把节点的status设为okay,本质上是让驱动程序在初始化时,能够自动搜到这个节点,并为这个节点创建device实例。
- Zephyr的标准驱动,让各个厂商都实现了相同功能的驱动API代码,从而实现了跨平台的统一驱动。
但是如果想要使用硬件特性的功能,就还是必须使用厂商自己的driver library或者直接写寄存器。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号