
ROS2笔记3--话题通讯
一、话题(Topic)通讯简介
话题通讯是ROS2使用频率最高的一种通信方式,有发布者发布指定话题的数据,订阅者只要订阅了该话题的数据,就可以接收到数据。话题通讯是基于发布/订阅模型,话题数据传输的特性是从一个节点到另一个节点,发送数据的对象称为发布者,接收数据的对象称为订阅者,每个话题都需要一个名字,传输的数据也需要有固定的数据类型。
二、话题案例
2.1、新建功能包
cd ~/ros_ws/src ros2 pkg create pkg_topic --build-type ament_python --dependencies rclpy --node-name publisher_demo
执行上述命令后,会创建pkg_topic功能包,同时会创建一个publisher_demo的节点,并且已配置好相关的配置文件。
2.2、发布者实现
# 导入rclpy
import rclpy
from rclpy.node import Node
# 导入String字符串消息
from std_msgs.msg import String
class Topic_Publisher(Node):
def __init__(self, name):
super().__init__(name)
# 创建发布者,使用create_publisher函数
# 传入参数分别是:话题数据类型、话题名称、消息队列长度
self.pub = self.create_publisher(String, "/topic_demo", 1)
# 中断函数执行的间隔时间,中断处理函数
self.timer = self.create_timer(1, self.pub_msg)
# 定义处理函数
def pub_msg(self):
msg = String()
msg.data = "Hello, I send a message"
self.pub.publish(msg) #发布话题数据
def main():
rclpy.init()
publisher_demo = Topic_Publisher("publisher_node")
rclpy.spin(publisher_demo)
publisher_demo.destroy_node()
rclpy.shutdown()
2.3、订阅方实现
# 导入相关的库
import rclpy
from rclpy.node import Node
from std_msgs.msg import String
class Topic_Subscriber(Node):
def __init__(self, name):
super().__init__(name)
# 创建订阅者使用的是create_subscription
# 参数分别是:话题数据类型、话题名称、回调函数名称,队列长度
self.sub = self.create_subscription(String, "/topic_demo", self.sub_callback, 1)
# 回调函数
def sub_callback(self, msg):
print("recv:" + msg.data)
def main():
rclpy.init()
subscriber_demo = Topic_Subscriber("subscriber_node")
rclpy.spin(subscriber_demo)
subscriber_demo.destroy_node()
rclpy.shutdown()
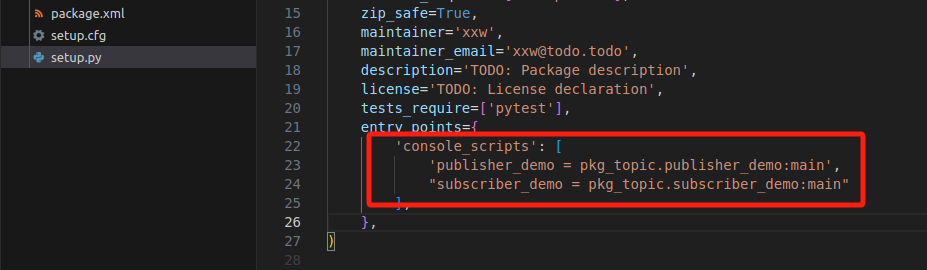
2.4、编辑配置文件、编译工作空间
编辑配置文件setup.py
编译工作空间
cd ~/ros_ws colcon build --packages-select pkg_topic source install/setup.bash
2.5、运行程序
分终端执行发布者节点和订阅者节点
# 启动发布者节点 ros2 run pkg_topic publisher_demo # 启动订阅者节点 ros2 run pkg_topic subscriber_demo
运行发布者节点

运行订阅者节点


 浙公网安备 33010602011771号
浙公网安备 33010602011771号