
ROS2笔记2--工作空间、功能包、节点
一、工作空间(Workspace)
ROS工作空间是用于存放ros功能包的一个文件夹,通常以ws结尾。用于存放工程开发相关的所有文件,包括源代码、编译生成的文件以及配置我呢见等。在ROS中工作空间是使用Catkin编译系统来组织和管理代码的基础单元。每个工作空间通常包含一个或多个功能包,这些功能包包含了实现特定功能的代码和资源。
1.1、创建工作空间
# 选择指定目录 cd ~ # 创建工作空间 mkdir -p ros_ws/src
1.2、编译工作空间
colcon build
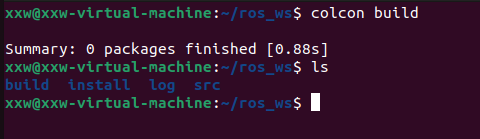
这个ros_ws就是工作空间的根目录,里面包含4个子目录
src:代码空间,用于后续编写代码、脚本等文件
build:编译空间,保存编译过程中产生的中间文件
install:安装空间,放置编译得到的可执行文件和脚本
log:日志空间,编译和运行过程中保存各种警告、错误、信息等日志
1.3、设置环境变量
编译成功后,需要设置环境变量
方法1:仅当前终端有效
source install/setup.bash
方法2:所有终端均有效
echo "source ~/ros_ws/install/setup.bash" >> ~/.bashrc
二、功能包(Package)
功能包是ROS中的一个基础组织单元,包含了一组实现特定功能的源代码文件、脚本、数据文件和其他资源。功能包可以独立存在,也可以依赖于其他功能包。每个功能包都有自己的依赖关系和构建规则,这些信息通常在功能包的package.xml文件中定义。功能包的设计使得代码复用和维护更加方便。
每个机器人可能有很多功能,比如移动控制、视觉感知、自主导航等,功能包的作用就是把不同的功能划分到不同的功能包中,尽量降低各个功能模块之间的耦合关系,当需要以功能包为单位提供时比较方便,所以功能包是ROS提供软件复用率的方法。
1、创建功能包
命令格式如下:
ros2 pkg create <package_name> --build-type <build-type> --dependencies <dependencies> --node-name
命令中:
pkg:表示功能包相关的功能
create:表示创建功能包
package_name:自定义功能包名称
build-type:功能包类似是python还是C++的,如果是C或C++则为ament_cmake;如果是python就是ament_python
dependencies:表示功能包的依赖项,C++需要包含rclcpp;Python需要包含rclpy,如有需要还有其他依赖
node-name:可执行程序的名称,会自动生成对应的源文件并生成配置文件
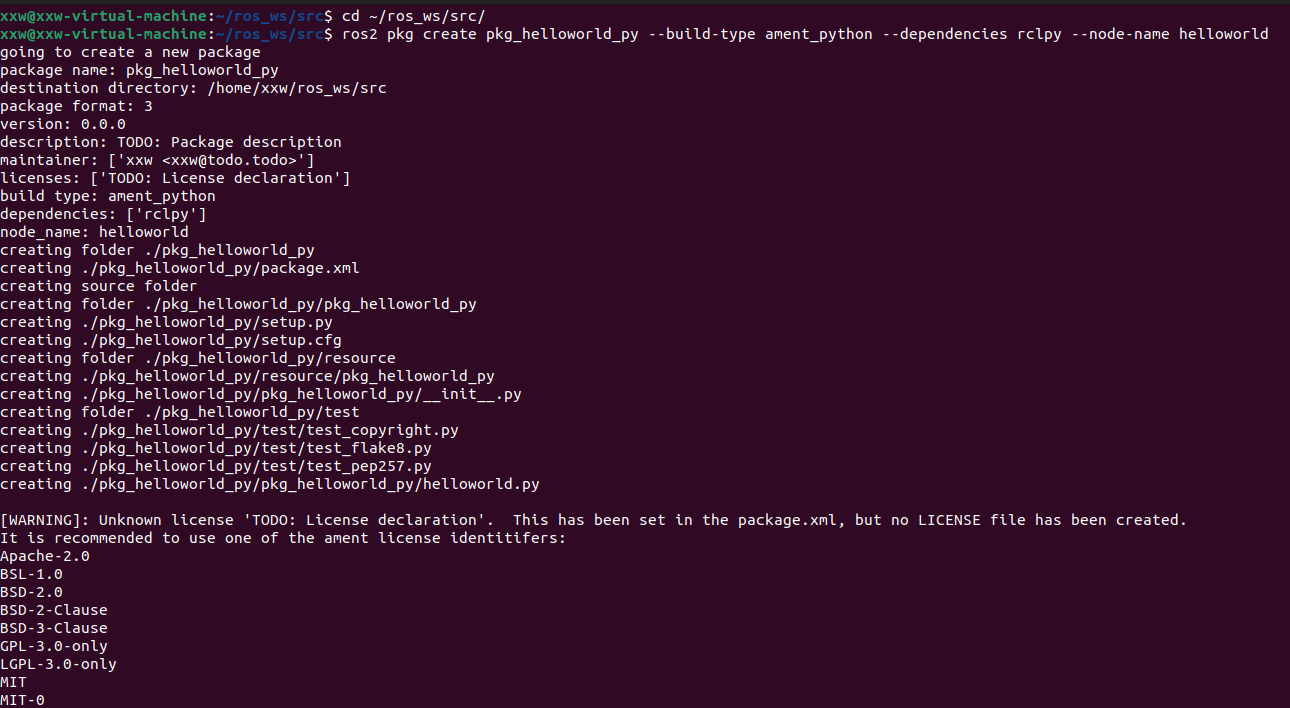
比如在终端中分别创建C++和Python版本的功能包:
cd ~/ros_ws/src # 创建C++功能包 ros2 pkg create pkg_helloworld_cpp --build-type ament_cmake --dependencies rclcpp --node-name helloworld # 创建Python功能包 ros2 pkg create pkg_helloworld_py --build-type ament_python --dependencies rclpy --node-name helloworld
2、编译功能包
创建好功能包后可以继续完成代码编写,之后需要编译和配置环境变量即可运行
cd ~/ros_ws/src # 编译工作空间所有功能包 colcon build # 编译指定1个或多个功能包 colcon build --packages-select 功能包名称列表 source install/setup.bash
三、节点(Node)
节点是ROS中运行的最小执行单元,是一个可执行文件,可以执行一些计算任务,处理数据,或者控制硬件设备。节点之间通过话题(Topic)、服务(Service)或动作(Action)等机制进行通信。节点可以发布话题提供其他节点订阅,或者提供服务给其他节点调用。一个完整的机器人系统由许多协同工作的节点组成,ROS2中单个可执行文件可以包含一个或多个节点。
节点创建的流程如下:
1、编程接口初始化
2、创建节点初始化
3、实现节点功能
4、销毁节点并关闭接口
以Python版本helloworld功能包节点为例
1、创建功能包
cd ~/ros_ws/src ros2 pkg create pkg_helloworld_py --build-type ament-python --dependencies rclpy --node-name helloworld
2、编写代码
创建功能包完成后,会自动创建hello world.py文件用于编写节点代码
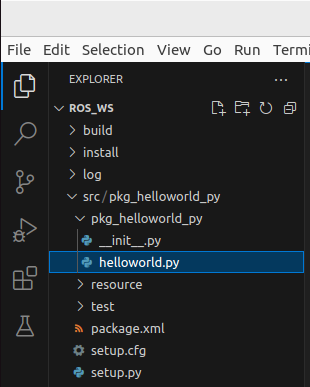
编写helloworld.py代码,逻辑为定时1秒打印一次Hello World
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
import time
# 定义HelloWorld节点,初始化时定时打印"Hello World"
class HelloWorldNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
while rclpy.ok(): # ROS2系统是否正常运行
self.get_logger().info("Hello World") # ROS2日志输出
time.sleep(1)
def main(args=None): # ROS2节点主入口函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = HelloWorldNode("helloworld") # 初始化ROS2节点对象
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
代码编写完成后需要设置功能包的编译选项,让系统知道程序的入口,打开功能包的setup.py文件,加入程序入口的配置:
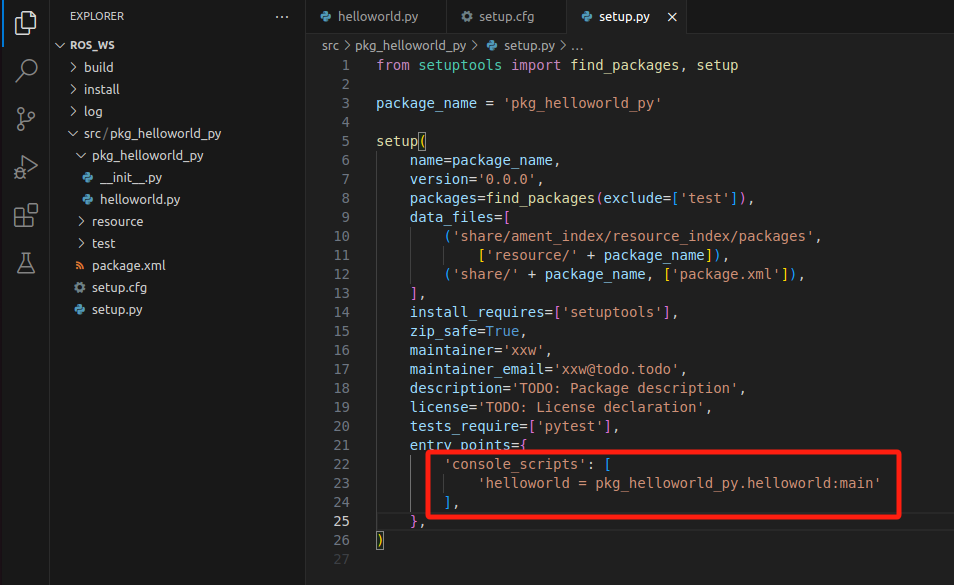
其中helloworld是可执行文件名称,pkg_helloworld_py是功能包名称,helloworld:main是python文件名称和入口函数名
3、编译代码
cd ~/ros_ws colcon build --packages-select pkg_helloworld_py source install/setup.bash

4、运行节点
ros2 run pkg_helloworld_py helloworld
运行成功后终端中定时打印“Hello World”字符串

 浙公网安备 33010602011771号
浙公网安备 33010602011771号