
android 6.0 高通平台sensor 工作机制及流程(原创)
最近工作上有碰到sensor的相关问题,正好分析下其流程作个笔记。
这个笔记分三个部分:
- sensor硬件和驱动的工作机制
- sensor 上层app如何使用
- 从驱动到上层app这中间的流程是如何
Sensor硬件和驱动的工作机制
先看看Accerometer +Gyro Sensor的原理图:

总结起来分四个部分(电源,地,通信接口,中断脚)。电源和地与平台和芯片本身有关系,与我们分析的没有多少关系,根据sensor的特性保证sensor正常工作的上电时序。关于通信接口,sensor与ap之间通信一般有两种接口(I2C/SPI)。因sensor数据量不大,I2C的速度足矣,目前使用I2C的居多。SDA是I2C的数据线,SCL是I2C的clock线。关于中断脚就是INT。Sensor有两个工作模式。一种是主动上报数据(每时每刻将获取到的数据上报给系统),另个一种是中断模式(当数据的变化大于了之前设置的触发条件),比如手机翻转大于45度,就会将当前的变化及当前数据上报给系统。
Sensor上层app的使用
先要注册指定sensor的事件监听,然在在有事件上报上来时,获取上报的数据。
具体代码如下:
1 SensorManager mSensorManager = (SensorManager)mContext.getSystemService(Context.SENSOR_SERVICE);
2 Sensor mSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
3
4 mSensorManager.registerListener(mSensorListener, mSensor, SensorManager.SENSOR_DELAY_GAME);
5 /*
6 public static final int SENSOR_DELAY_FASTEST = 0;
7 public static final int SENSOR_DELAY_GAME = 1;
8 public static final int SENSOR_DELAY_UI = 2;
9 public static final int SENSOR_DELAY_NORMAL = 3;
10 上报的速度可以根据需求来选择
11 */
12
13 SensorEventListener mSensorListener = new SensorEventListener(){
14 public void onAccuracyChanged(Sensor arg0, int arg1){
15 }
16
17 public void onSensorChanged(SensorEvent event){
18 if(event.sensor == null){
19 return;
20 }
21 Log.d(TAG, "onSensorChanged");
22 if(Sensor.TYPE_ACCELEROMETER == event.sensor.getType()) {
23 mGsensor = (float)event.values[SensorManager.DATA_Z];
24 mSensorManager.unregisterListener(this);
25 Log.e(TAG, "mgsensor = " + mGsensor);
26 mOnSensorChangedFlag = false;
27 }
28 }
29 }
从驱动到上层App这中间的流程如何
前面二段分别说了驱动上报数据和app读取数据,但中间的流程是如何的呢,这个是此篇博客的重点了。
驱动层上报数据后,HAL层怎么处理呢?这个属于input hal层的接收和分发了。来,我们来啃啃这个骨头:
frameworks/base/core/java/android/app/SystemServiceRegistry.java
419 registerService(Context.SENSOR_SERVICE, SensorManager.class, 420 new CachedServiceFetcher<SensorManager>() { 421 @Override 422 public SensorManager createService(ContextImpl ctx) { 423 return new SystemSensorManager(ctx.getOuterContext(), 424 ctx.mMainThread.getHandler().getLooper()); 425 }});
mContext.getSystemService(Context.SENSOR_SERVICE) 返回的就是SystemSensorManager 的对象(也是继承SensorManager 类)。
frameworks/base/core/java/android/hardware/SensorManager.java
790 public Sensor getDefaultSensor(int type) { ...................................................................... 841 List<Sensor> l = getSensorList(type); 842 boolean wakeUpSensor = false; 846 if (type == Sensor.TYPE_PROXIMITY || type == Sensor.TYPE_SIGNIFICANT_MOTION || 847 type == Sensor.TYPE_TILT_DETECTOR || type == Sensor.TYPE_WAKE_GESTURE || 848 type == Sensor.TYPE_GLANCE_GESTURE || type == Sensor.TYPE_PICK_UP_GESTURE || 849 type == Sensor.TYPE_WRIST_TILT_GESTURE) { 850 wakeUpSensor = true; 851 } 852 //返回支持唤醒的sensor 853 for (Sensor sensor : l) { 854 if (sensor.isWakeUpSensor() == wakeUpSensor) return sensor; 855 } }
我们再看看getSensorList这里面有啥玩意。。。。
public List<Sensor> getSensorList(int type) { ....................................................................... final List<Sensor> fullList = getFullSensorList(); //然后再种所有sensor中找出对应的sensor for (Sensor i : fullList) { if (i.getType() == type) list.add(i); } return list; }
getFullSensorList这个函数返回的是mFullSensorsList。
mFullSensorList是SystemSensorManager 遍历所有的sensor得到的集合。
下一步我们再来看看registerListener是怎么回事。
frameworks/base/core/java/android/hardware/SystemSensorManager.java
protected boolean registerListenerImpl(SensorEventListener listener, Sensor sensor, int delayUs, Handler handler, int maxBatchReportLatencyUs, int reservedFlags) { synchronized (mSensorListeners) { //先查看下此sensor的监听队列是否已经存在,如果不存在,就重新new个 SensorEventQueue queue = mSensorListeners.get(listener); if (queue == null) { queue = new SensorEventQueue(listener, looper, this, fullClassName); mSensorListeners.put(listener, queue); return true; } else { return queue.addSensor(sensor, delayUs, maxBatchReportLatencyUs); } }
到这里就明显是一个消息队列回调的问题了,肯定是发现消息队列里有消息时就会回调具体的事件。我们继续撸代码。
static final class SensorEventQueue extends BaseEventQueue { protected void dispatchSensorEvent(int handle, float[] values, int inAccuracy, long timestamp) { ...................................................... // call onAccuracyChanged() only if the value changes final int accuracy = mSensorAccuracies.get(handle); if ((t.accuracy >= 0) && (accuracy != t.accuracy)) { mSensorAccuracies.put(handle, t.accuracy); mListener.onAccuracyChanged(t.sensor, t.accuracy); } mListener.onSensorChanged(t); } }
从这里就可以看我们listener里实现的onAccuracyChanged,onSensorChanged是怎么被调用。
frameworks/base/core/java/android/hardware/SensorEventListener.java
public interface SensorEventListener {
public void onSensorChanged(SensorEvent event);
public void onAccuracyChanged(Sensor sensor, int accuracy);
}
就是一个接口,里面声明两个函数。
看到回调是在dispatchSensorEvent里做的,看看是谁调用的。。。
frameworks/base/core/jni/android_hardware_SensorManager.cpp
class Receiver : public LooperCallback { virtual int handleEvent(int fd, int events, void* data) { ASensorEvent buffer[16]; while ((n = q->read(buffer, 16)) > 0) { for (int i=0 ; i<n ; i++) { if (buffer[i].type == SENSOR_TYPE_META_DATA) { // This is a flush complete sensor event. Call dispatchFlushCompleteEvent // method. if (receiverObj.get()) { env->CallVoidMethod(receiverObj.get(), gBaseEventQueueClassInfo.dispatchFlushCompleteEvent, buffer[i].meta_data.sensor); } } else { if (receiverObj.get()) { env->CallVoidMethod(receiverObj.get(), gBaseEventQueueClassInfo.dispatchSensorEvent, buffer[i].sensor, mScratch, status, buffer[i].timestamp); } } } } }
读到的数据,根据数据的类型去回调不同的接口。dispatchSensorEvent就是在这里被调用的。
handleEvent这个是一个典型的eventQueue这事件处理,具体就不在这里分析了。
回调这些都有分析了,那事件是哪里加入到消息队列中的,那些消息又是怎么来的呢,话说问题问对了,就能找到往下查的路了。。哈哈
理论这些肯定会有sensor服务在开机的时候启动的,那服务在哪里,是怎么启动的呢。。。
frameworks/base/services/java/com/android/server/SystemServer.java
private void startBootstrapServices() { ................................................... startSensorService(); }
这个startSensorService是个jni函数,调用的是:
frameworks/base/services/core/jni/com_android_server_SystemServer.cpp
static void android_server_SystemServer_startSensorService(JNIEnv* /* env */, jobject /* clazz */) { //创建一个线程做sensorinit的工作 pthread_create( &sensor_init_thread, NULL, &sensorInit, NULL); } void* sensorInit(void *arg) { SensorService::instantiate(); }
sensorService服务就做初始化了,服务启动时会做threadLoop(),
bool SensorService::threadLoop() { ALOGD("nuSensorService thread starting..."); const size_t minBufferSize = SensorEventQueue::MAX_RECEIVE_BUFFER_EVENT_COUNT; const size_t numEventMax = minBufferSize / (1 + mVirtualSensorList.size()); //device初始化 SensorDevice& device(SensorDevice::getInstance()); const size_t vcount = mVirtualSensorList.size(); const int halVersion = device.getHalDeviceVersion(); do { //调用device.poll ssize_t count = device.poll(mSensorEventBuffer, numEventMax); if (count < 0) { ALOGE("sensor poll failed (%s)", strerror(-count)); break; } }
再看看SensorDevice 里初始化和poll里做了啥 :
SensorDevice::SensorDevice() : mSensorDevice(0), mSensorModule(0) {
//get HAL module status_t err = hw_get_module(SENSORS_HARDWARE_MODULE_ID, (hw_module_t const**)&mSensorModule); ALOGE_IF(err, "couldn't load %s module (%s)", SENSORS_HARDWARE_MODULE_ID, strerror(-err)); if (mSensorModule) {
//open HAL module err = sensors_open_1(&mSensorModule->common, &mSensorDevice); ................................................... }
SensorDevice初始化做了两个动作,一个是获取sensor HAL module,紧接着打开sensor hal module。
再一起看年poll里做啥了,
ssize_t SensorDevice::poll(sensors_event_t* buffer, size_t count) { if (!mSensorDevice) return NO_INIT; ssize_t c; do { c = mSensorDevice->poll(reinterpret_cast<struct sensors_poll_device_t *> (mSensorDevice), buffer, count); } while (c == -EINTR); return c; }
poll也是调用 的是Hal module里的poll。
那sensor HAL里做了啥呢,模块做了啥呢?
sensor hal路径:hardware/libhardware/modules/sensors/
hardware/libhardware/modules/sensors/multihal.cpp
624 static int open_sensors(const struct hw_module_t* hw_module, const char* name, 625 struct hw_device_t** hw_device_out) { 626 ALOGV("open_sensors begin..."); 627 //初始化加载高通的库 628 lazy_init_modules(); 629 630 // Create proxy device, to return later. 631 sensors_poll_context_t *dev = new sensors_poll_context_t(); 632 memset(dev, 0, sizeof(sensors_poll_device_1_t)); 633 dev->proxy_device.common.tag = HARDWARE_DEVICE_TAG; 634 dev->proxy_device.common.version = SENSORS_DEVICE_API_VERSION_1_3; 635 dev->proxy_device.common.module = const_cast<hw_module_t*>(hw_module); 636 dev->proxy_device.common.close = device__close; 637 dev->proxy_device.activate = device__activate; 638 dev->proxy_device.setDelay = device__setDelay; 639 dev->proxy_device.poll = device__poll; 640 dev->proxy_device.batch = device__batch; 641 dev->proxy_device.flush = device__flush; ....................................... }
我们看看lazy_init_modules()这个,是把指定的的hal so加载起来。。
481 /* 482 * Ensures that the sub-module array is initialized. 483 * This can be first called from get_sensors_list or from open_sensors. 484 */ 485 static void lazy_init_modules() { 486 pthread_mutex_lock(&init_modules_mutex); 487 if (sub_hw_modules != NULL) { 488 pthread_mutex_unlock(&init_modules_mutex); 489 return; 490 } 491 std::vector<std::string> *so_paths = new std::vector<std::string>(); 481 /* 482 * Ensures that the sub-module array is initialized. 483 * This can be first called from get_sensors_list or from open_sensors. 484 */ 485 static void lazy_init_modules() { 486 pthread_mutex_lock(&init_modules_mutex); 487 if (sub_hw_modules != NULL) { 488 pthread_mutex_unlock(&init_modules_mutex); 489 return; 490 } 491 std::vector<std::string> *so_paths = new std::vector<std::string>(); 492 get_so_paths(so_paths); 493 494 // dlopen the module files and cache their module symbols in sub_hw_modules 495 sub_hw_modules = new std::vector<hw_module_t *>(); 496 dlerror(); // clear any old errors 497 const char* sym = HAL_MODULE_INFO_SYM_AS_STR; 498 for (std::vector<std::string>::iterator it = so_paths->begin(); it != so_paths->end(); it++) { 499 const char* path = it->c_str(); 500 void* lib_handle = dlopen(path, RTLD_LAZY); 501 if (lib_handle == NULL) { 502 ALOGW("dlerror(): %s", dlerror()); 503 } else { 504 ALOGI("Loaded library from %s", path); 505 ALOGV("Opening symbol \"%s\"", sym); 506 // clear old errors 507 dlerror(); 508 struct hw_module_t* module = (hw_module_t*) dlsym(lib_handle, sym); 509 const char* error; 510 if ((error = dlerror()) != NULL) { 511 ALOGW("Error calling dlsym: %s", error); 512 } else if (module == NULL) { 513 ALOGW("module == NULL"); 514 } else { 515 ALOGV("Loaded symbols from \"%s\"", sym); 516 sub_hw_modules->push_back(module); 517 } 518 } 519 } 520 pthread_mutex_unlock(&init_modules_mutex); 521 } //获取的要加载so库的路径:/system/etc/sensors/hals.conf 492 get_so_paths(so_paths); 493 494 // dlopen the module files and cache their module symbols in sub_hw_modules 495 sub_hw_modules = new std::vector<hw_module_t *>(); 496 dlerror(); // clear any old errors 497 const char* sym = HAL_MODULE_INFO_SYM_AS_STR; 498 for (std::vector<std::string>::iterator it = so_paths->begin(); it != so_paths->end(); it++) { 499 const char* path = it->c_str(); 500 void* lib_handle = dlopen(path, RTLD_LAZY); 501 if (lib_handle == NULL) { 502 ALOGW("dlerror(): %s", dlerror()); 503 } else { 504 ALOGI("Loaded library from %s", path); 505 ALOGV("Opening symbol \"%s\"", sym); 506 // clear old errors 507 dlerror(); 508 struct hw_module_t* module = (hw_module_t*) dlsym(lib_handle, sym); 509 const char* error; 510 if ((error = dlerror()) != NULL) { 511 ALOGW("Error calling dlsym: %s", error); 512 } else if (module == NULL) { 513 ALOGW("module == NULL"); 514 } else { 515 ALOGV("Loaded symbols from \"%s\"", sym); 516 sub_hw_modules->push_back(module); 517 } 518 } 519 } 520 pthread_mutex_unlock(&init_modules_mutex); 521 }
这个路径下就一个库:sensors.ssc.so
再来看看poll看名字就能猜到是从数据队列里等数据,看代码:
330 int sensors_poll_context_t::poll(sensors_event_t *data, int maxReads) { 331 ALOGV("poll"); 332 int empties = 0; 333 int queueCount = 0; 334 int eventsRead = 0; 335 336 pthread_mutex_lock(&queue_mutex); 337 queueCount = (int)this->queues.size(); 338 while (eventsRead == 0) { 339 while (empties < queueCount && eventsRead < maxReads) { 340 SensorEventQueue* queue = this->queues.at(this->nextReadIndex); 341 sensors_event_t* event = queue->peek();
确实是消息队列。。。
再来年看看加载的so库这个是高通的sensor hal库。
代码路径:vendor/qcom/proprietary/sensors/dsps/libhalsensors
看先从哪里插入数据的:
vendor/qcom/proprietary/sensors/dsps/libhalsensors/src/Utility.cpp
bool Utility::insertQueue(sensors_event_t const *data_ptr){ .......................... if (q_head_ptr == NULL) { /* queue is empty */ q_tail_ptr = q_ptr; q_head_ptr = q_ptr; } else { /* append to tail and update tail ptr */ q_tail_ptr->next = q_ptr; q_tail_ptr = q_ptr; } }
那看调用的有哪些呢?
Orientation.cpp (src): if (Utility::insertQueue(&la_sample)) {
PedestrianActivityMonitor.cpp (src): if (Utility::insertQueue(&sensor_data)) {
Pedometer.cpp (src): if (Utility::insertQueue(&la_sample)) {
PickUpGesture.cpp (src): if (Utility::insertQueue(&sensor_data)) {
QHeart.cpp (src): if (Utility::insertQueue(&la_sample)) {
RelativeMotionDetector.cpp (src): if (Utility::insertQueue(&sensor_data)) {
RotationVector.cpp (src): if (Utility::insertQueue(&la_sample)) {
Sensor.cpp (src): if (Utility::insertQueue(&flush_evt)){
....................................................................
都在各类sensor的processInd 这个函数中,每种sensor类型根据自身数据的特点,对其做数据结构做指定封装。也就是所谓的工厂模式。
有一个调用比较特别:SMGRSensor.cpp 中processReportInd函数,这个函数中
void SMGRSensor::processReportInd(Sensor** mSensors, sns_smgr_periodic_report_ind_msg_v01* smgr_ind){ ............................... handle = getHandleFromInd(smgr_ind->ReportId, smgr_data->DataType, smgr_data->SensorId); if (handle == -1 ) { HAL_LOG_ERROR(" %s: ReportId = %d DataType = %d SensorId = %d ", __FUNCTION__, smgr_ind->ReportId, smgr_data->DataType, smgr_data->SensorId); goto error; } /* Corresponds to screen orientation req, fill in the right type */ if ((handle == HANDLE_ACCELERATION) && (smgr_ind->ReportId == HANDLE_MOTION_ACCEL)) { sensor_data.type = SENSOR_TYPE_SCREEN_ORIENTATION; sensor_data.sensor = HANDLE_MOTION_ACCEL; } if (mSensors[handle] != NULL) { (static_cast<SMGRSensor*>(mSensors[handle]))->processReportInd(smgr_ind, smgr_data, sensor_data); } ................................ if (Utility::insertQueue(&sensor_data)) { Utility::signalInd(data_cb); } }
这里根据smgr_data->DataType又做了一次工厂模式的分发处理:
GyroscopeUncalibrated.cpp (src): FUNCTION: processReportInd GyroscopeUncalibrated.cpp (src):void GyroscopeUncalibrated::processReportInd( GyroscopeUncalibrated.cpp (src): HAL_LOG_DEBUG("GyroscopeUncalibrated::processReportInd"); GyroscopeUncalibrated.h (inc): FUNCTION: processReportInd GyroscopeUncalibrated.h (inc): void processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, HallEffect.cpp (src): FUNCTION: processReportInd HallEffect.cpp (src):void HallEffect::processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, HallEffect.h (inc): FUNCTION: processReportInd HallEffect.h (inc): void processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, Humidity.cpp (src): FUNCTION: processReportInd Humidity.cpp (src):void Humidity::processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, Humidity.h (inc): FUNCTION: processReportInd Humidity.h (inc): void processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, IRGesture.cpp (src): FUNCTION: processReportInd IRGesture.cpp (src):void IRGesture::processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, IRGesture.h (inc): FUNCTION: processReportInd IRGesture.h (inc): void processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, Light.cpp (src): FUNCTION: processReportInd Light.cpp (src):void Light::processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, Light.h (inc): FUNCTION: processReportInd Light.h (inc): void processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, Magnetic.cpp (src): FUNCTION: processReportInd Magnetic.cpp (src):void Magnetic::processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind, Magnetic.h (inc): FUNCTION: processReportInd Magnetic.h (inc): void processReportInd(sns_smgr_periodic_report_ind_msg_v01* smgr_ind
又是根据类型不同,做了另一批类型sensor的处理。
继续反向推导,processReportInd其它这个也是processBufferingInd 调用的,processBufferingInd也是processInd 调用的。这就和其它的sensor到统一战线上了。都是processInd处理的。
关键就是这processInd了,这个是一个回调SMGRSensor_sensor1_cb函数里处理的。那这个回调是谁注册,又是什么调用的呢?
vendor/qcom/proprietary/sensors/dsps/libhalsensors/src/SensorsContext.cpp
这个里面会在SensorContext实例化时注册。
SensorsContext::SensorsContext() : active_sensors(0), is_accel_available(false), is_gyro_available(false), is_mag_available(false), is_prox_available(false), smgr_version(0) { 。。。。。。。。。。。。。。。。。。。 err = sensor1_open(&sensor_info_sensor1_cb->sensor1_handle, &context_sensor1_cb, (intptr_t)this); 。。。。。。。。。 }
那得去撸代码啊,不然不知道啥时候回调context_sensor1_cb这个函数啊。。。
这个函数在另一个库中了libsensor1。。
这个函数做的事情比较多,分三部分:
sensor1_open( sensor1_handle_s **hndl, sensor1_notify_data_cb_t data_cbf, intptr_t cb_data ) { ......................... sensor1_init(); ............................ sockfd = socket(AF_UNIX, SOCK_SEQPACKET, 0)) strlcpy(address.sun_path, SENSOR_CTL_SOCKET, UNIX_PATH_MAX); connect(sockfd, (struct sockaddr *)&address, len) ..................................... libsensor_add_waiting_client(&cli_data); libsensor_add_client( &new_cli, false ) ..................................... }
那第一步先看看sensor1_init做了啥?

相当于创建了一个读线程,一直在poll读消息队列里的消息,读到消息后,会封装数据,然后发一个信息去唤醒另外一个线程,唤醒的线程后面再说。
第二步再看看,创建了一个socket(一个客户端socket),去连接服务端的socket(服务端的socket又是什么东东),上个读线程读到的消息就是从socket读到的消息(libsensor_read_socket),那一定是服务端socket发送过来的嘛。。。
第三步增加client,再看看这个又做了啥?

这里又创建了一个回调线程,等有消息来时,唤醒本线程,然后回调sensor.ssc.库里的context_sensor1_cb。这个线程就谁唤醒的呢,哈哈,大家就能想到就是init中的那个读线程嘛。
总结sensor1_open就是创建一个读线程从socket客户端中读数据,读到数据后,就回调sensor.ssc库中的context_sensor1_cb,进而上报数据做进一步回调。
那问题来了,那个socket服务端又是怎么回事呢。。。慢慢接近真相了。。。。
这时又出现了一个服务SensorDaemon:
代码路径:vendor/qcom/proprietary/sensors/dsps/sensordaemon
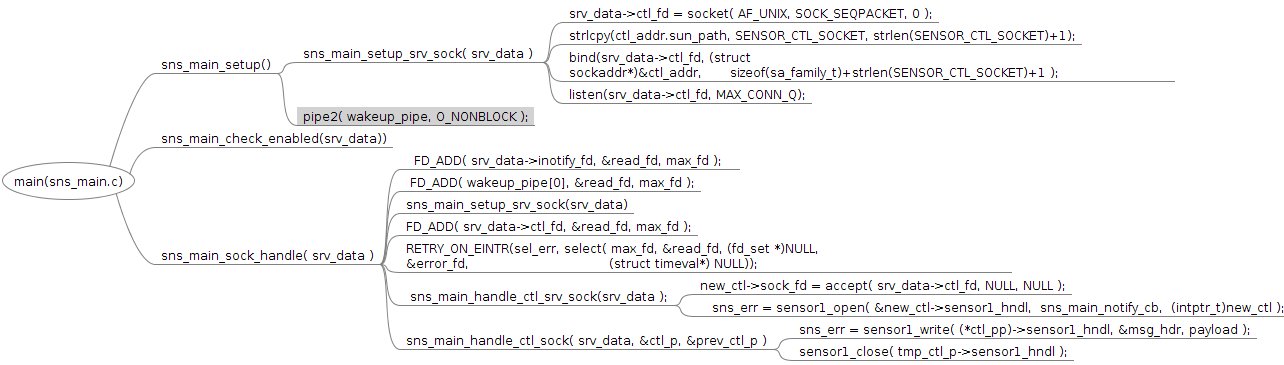
sns_main_setup 里创建了socket服务器端,然后监听客户端socket的监听,那什么时候往socket里写东西呢?
这就涉及另一个回调函数了sns_main_notify_cb。这个回调函数则好就是sensor1_open里注册的。这个sensor1_open 与 libsensor1里的sensor1_open不是同一个。
ok,那问题又来了,啥时候做的回调,和之前很类似,有一个读线程,初始化后处理polling状态,当收到消息时,就回调这个回调函数。

这个读线程的数据是从哪里来的呢,这就涉及到QMI service了。QMI service这部分代码就不是AP这边了,此份代码就在modem的adsp代码中了。
找时间再来续modem这边的adsp。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号