数据结构与算法(八)——高级搜索树(上)
iwehdio的博客园:https://www.cnblogs.com/iwehdio/
1、伸展树
-
局部性:刚被访问过的数据,极有可能会很快的在此被访问。
-
对于BST而言,刚刚访问的节点,极有可能很快被再次访问。而下一将要访问的节点,极有可能就在刚被访问过节点的附近。
-
局部性对于查找算法的意义:将刚刚被访问的节点移送到深度较浅的位置(树根)。如果找不到目标,则操作最后一个访问到的节点。
-
局部性对于插入算法的意义:首先插入首先需要先进行一次查找,将最后一个访问到的节点伸展到树根,再在树根位置插入目标。
-
局部性对于删除操作的意义:删除后,将一个与删除节点临近的节点作为根节点。
-
逐层伸展:
-
节点v一旦被访问,随即转移至树根。
-
可以通过多次的zig/zag操作,降低节点的深度,最终到达树根的位置。
-
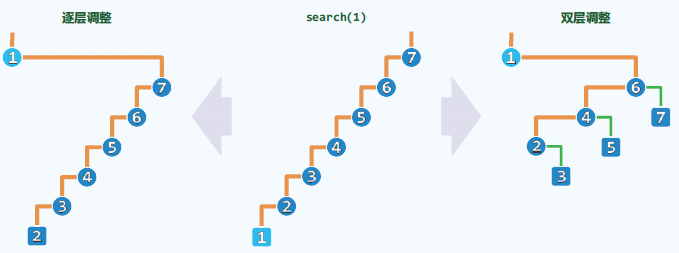
最坏情况:逐层伸展将最终回到原状。分摊Ω(n)。

-
-
双层伸展:
-
每次向上追溯两层,而不是一层。即从节点v,开启,其父亲p和祖父g,经过双层伸展后都会成为v的后代。节点v变换后达到了原来祖父g的深度。
-
具体的操作:
-
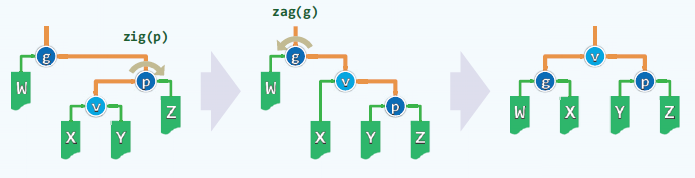
对于子孙异侧的情况,通过zig-zag或zag-zig变换。实际上与两次逐层伸展没有区别。
-
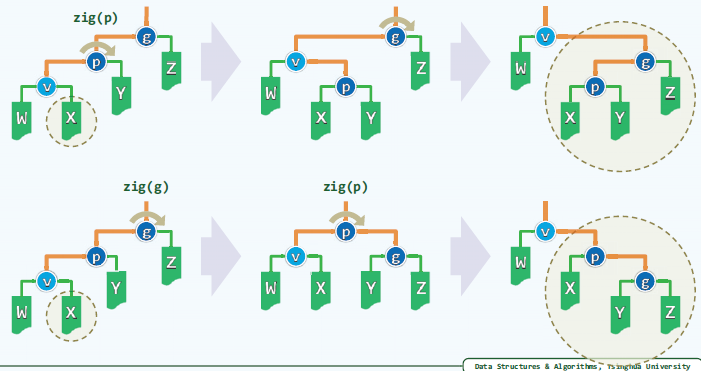
对于子孙同侧的情况,通过zig-zig或zag-zag变换。上边是先旋转p,再旋转g,相当于两次逐层伸展。下边是先旋转g,再旋转p,是双层伸展。可以看出其局部结果不同,
-
-
这样的效果是,对于子孙同侧的情况下,每次伸展都会使得树高降低。也就是具有折叠效果,一旦访问坏节点(较深的),对应路径的长度将随即减半。分摊O(log n)。
-
如果v的深度为技术,即可能出现v只有父亲没有祖父。这种情况只需要在最后执行单次旋转即可。
-
-
算法实现:
-
伸展算法:
template <typename NodePosi> inline //在节点*p与*lc(可能为空)之间建立父(左)子关系 void attachAsLChild ( NodePosi p, NodePosi lc ) { p->lc = lc; if ( lc ) lc->parent = p; } template <typename NodePosi> inline //在节点*p与*rc(可能为空)之间建立父(右)子关系 void attachAsRChild ( NodePosi p, NodePosi rc ) { p->rc = rc; if ( rc ) rc->parent = p; } template <typename T> //Splay树伸展算法:从节点v出发逐层伸展 BinNodePosi(T) Splay<T>::splay ( BinNodePosi(T) v ) { //v为因最近访问而需伸展的节点位置 if ( !v ) return NULL; BinNodePosi(T) p; BinNodePosi(T) g; //*v的父亲与祖父 while ( ( p = v->parent ) && ( g = p->parent ) ) { //自下而上,反复对*v做双层伸展 BinNodePosi(T) gg = g->parent; //每轮之后*v都以原曾祖父(great-grand parent)为父 if ( IsLChild ( *v ) ) if ( IsLChild ( *p ) ) { //zig-zig /*DSA*/printf ( "\tzIg-zIg :" ); print ( g ); print ( p ); print ( v ); printf ( "\n" ); attachAsLChild ( g, p->rc ); attachAsLChild ( p, v->rc ); attachAsRChild ( p, g ); attachAsRChild ( v, p ); } else { //zig-zag /*DSA*/printf ( "\tzIg-zAg :" ); print ( g ); print ( p ); print ( v ); printf ( "\n" ); attachAsLChild ( p, v->rc ); attachAsRChild ( g, v->lc ); attachAsLChild ( v, g ); attachAsRChild ( v, p ); } else if ( IsRChild ( *p ) ) { //zag-zag /*DSA*/printf ( "\tzAg-zAg :" ); print ( g ); print ( p ); print ( v ); printf ( "\n" ); attachAsRChild ( g, p->lc ); attachAsRChild ( p, v->lc ); attachAsLChild ( p, g ); attachAsLChild ( v, p ); } else { //zag-zig /*DSA*/printf ( "\tzAg-zIg :" ); print ( g ); print ( p ); print ( v ); printf ( "\n" ); attachAsRChild ( p, v->lc ); attachAsLChild ( g, v->rc ); attachAsRChild ( v, g ); attachAsLChild ( v, p ); } if ( !gg ) v->parent = NULL; //若*v原先的曾祖父*gg不存在,则*v现在应为树根 else //否则,*gg此后应该以*v作为左或右孩子 ( g == gg->lc ) ? attachAsLChild ( gg, v ) : attachAsRChild ( gg, v ); updateHeight ( g ); updateHeight ( p ); updateHeight ( v ); } //双层伸展结束时,必有g == NULL,但p可能非空 if ( p = v->parent ) { //若p果真非空,则额外再做一次单旋 /*DSA*/if ( IsLChild ( *v ) ) { printf ( "\tzIg :" ); print ( p ); print ( v ); printf ( "\n" ); } /*DSA*/else { printf ( "\tzAg :" ); print ( p ); print ( v ); printf ( "\n" ); } if ( IsLChild ( *v ) ) { attachAsLChild ( p, v->rc ); attachAsRChild ( v, p ); } else { attachAsRChild ( p, v->lc ); attachAsLChild ( v, p ); } updateHeight ( p ); updateHeight ( v ); } v->parent = NULL; return v; } //调整之后新树根应为被伸展的节点,故返回该节点的位置以便上层函数更新树根 -
查找算法:
template <typename T> BinNodePosi(T) & Splay<T>::search ( const T & e ) { //在伸展树中查找e BinNodePosi(T) p = BST<T>::search ( e ); _root = splay ( p ? p : _hot ); //将最后一个被访问的节点伸展至根 return _root; } //与其它BST不同,无论查找成功与否,_root都指向最后被访问的节点 -
插入算法:
- 插入的语义,先执行一次搜索,将返回的终点节点伸展为树根,再将所要插入的数据插入在树根。
- 终点节点伸展为树根,是为了快速的确定插入节点的位置。
template <typename T> BinNodePosi(T) Splay<T>::insert ( const T& e ) { //将关键码e插入伸展树中 if ( !_root ) { _size++; return _root = new BinNode<T> ( e ); } //处理原树为空的退化情况 if ( e == search ( e )->data ) return _root; //确认目标节点不存在 _size++; BinNodePosi(T) t = _root; //创建新节点。以下调整<=7个指针以完成局部重构 if ( _root->data < e ) { //插入新根,以t和t->rc为左、右孩子 t->parent = _root = new BinNode<T> ( e, NULL, t, t->rc ); //2 + 3个 if ( HasRChild ( *t ) ) { t->rc->parent = _root; t->rc = NULL; } //<= 2个 } else { //插入新根,以t->lc和t为左、右孩子 t->parent = _root = new BinNode<T> ( e, NULL, t->lc, t ); //2 + 3个 if ( HasLChild ( *t ) ) { t->lc->parent = _root; t->lc = NULL; } //<= 2个 } updateHeightAbove ( t ); //更新t及其祖先(实际上只有_root一个)的高度 return _root; //新节点必然置于树根,返回之 } //无论e是否存在于原树中,返回时总有_root->data == e -
删除算法:
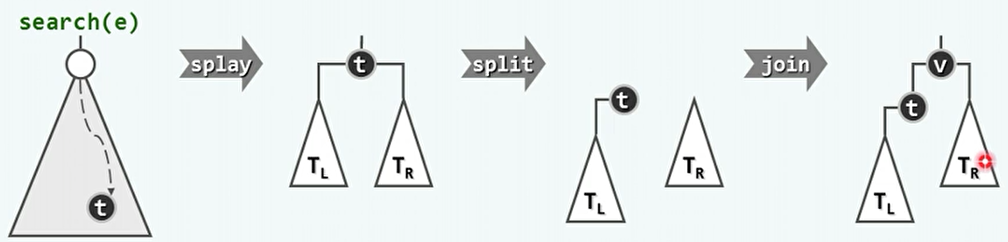
- 先查找,将目标节点伸展至树根。
- 在树根处删除,然后选择左子树中的最大值或右子树中的最小值作为树根。
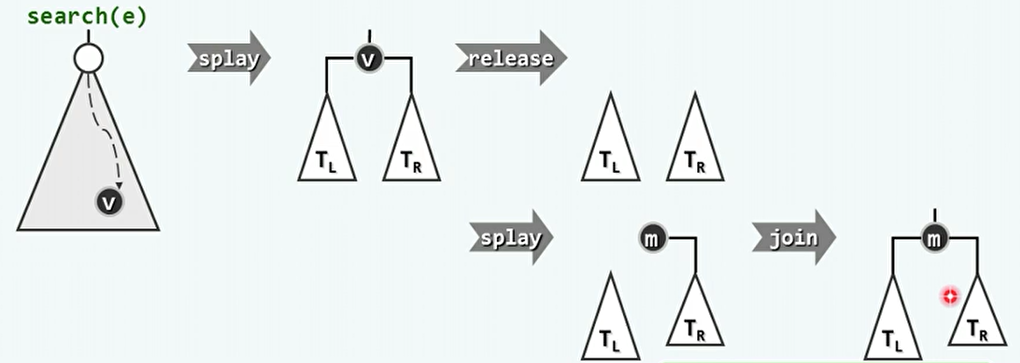
template <typename T> bool Splay<T>::remove ( const T& e ) { //从伸展树中删除关键码e if ( !_root || ( e != search ( e )->data ) ) return false; //若树空或目标不存在,则无法删除 BinNodePosi(T) w = _root; //assert: 经search()后节点e已被伸展至树根 if ( !HasLChild ( *_root ) ) { //若无左子树,则直接删除 _root = _root->rc; if ( _root ) _root->parent = NULL; } else if ( !HasRChild ( *_root ) ) { //若无右子树,也直接删除 _root = _root->lc; if ( _root ) _root->parent = NULL; } else { //若左右子树同时存在,则 BinNodePosi(T) lTree = _root->lc; lTree->parent = NULL; _root->lc = NULL; //暂时将左子树切除 _root = _root->rc; _root->parent = NULL; //只保留右子树 search ( w->data ); //以原树根为目标,做一次(必定失败的)查找 ///// assert: 至此,右子树中最小节点必伸展至根,且(因无雷同节点)其左子树必空,于是 _root->lc = lTree; lTree->parent = _root; //只需将原左子树接回原位即可 } release ( w->data ); release ( w ); _size--; //释放节点,更新规模 if ( _root ) updateHeight ( _root ); //此后,若树非空,则树根的高度需要更新 return true; //返回成功标志 } //若目标节点存在且被删除,返回true;否则返回false
-
-
伸展树:
- 无需记录节点高度或平衡银子,分摊复杂度O(log n)。
- 局部性强、缓存命中率高时,效率会更高。
- 伸展树的目标其实是,最终构建一个最常访问的规模为k的BBST。这一部分在整个伸展树的最上层,其下的不常访问的数据就像不存在一样。
- 仍不能保证单次最坏情况的出现,不适用于对单次操作效率敏感的场合。
2、B树
-
动机:弥合不同存储级别上在访问速度上的差异,实现高效IO。
- 事实1:容量的存储器,访问速度差异悬殊。磁盘与内存的访问速度相差在5个数量级左右。
- 使用缓存和多级存储系统,最常用的数据尽可能放在更高层、更小的存储器中。实在找不到,才向更低层、更大的存储器索取。不同级别之间的数据访问就是IO。
- 事实2:从磁盘中读写1B,与读写1KB几乎一样快。即批量式读取可以提高效率。
-
B树的结构:
- 每个节点可以具有多个分叉。所有叶子节点的深度都是相同的。
- 是一种平衡的多路搜索树。B树中的非叶子节点称作超级节点,可以由多代的二叉搜索树合并得来。
- 意义:在多级存储系统汇总使用B树,可针对外部查找,可以大大减少IO操作。
- 对于树型结构而言,每进入下一层就要进行一次IO操作,对二叉树来说次数太多。而B树可以充分利用外存对批量访问的高效支持,每下降一次就读入一个超级节点中的一组关键码。
-
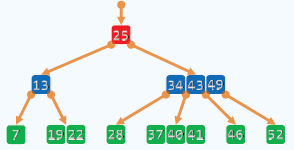
B树的严格定义:
- m阶B树,即m路平衡搜索树。(m>2)
- 外部节点的深度统一相等,叶节点的深度统一相等。外部节点就是叶节点所指向的为空的子节点,也可能是指向更低层次存储级别的B树。
- 树高等于外部节点的深度。
-
对于阶次m(记内部节点中关键码个数为n):
- 上界:
- 关键码个数n<=m-1。
- 分支数n+1<=m。
- 下界:
- 树根的分支数为n+1>=2。
- 其他节点的分支数n+1>=[m/2]。
- 也可将某种树记为([m/2],m)树。
- 上界:
-
B树的实现:
-
B树节点:用两个向量保存关键码和指向孩子的引用。
template <typename T> struct BTNode { //B-树节点模板类 // 成员(为简化描述起见统一开放,读者可根据需要进一步封装) BTNodePosi(T) parent; //父节点 Vector<T> key; //关键码向量 Vector<BTNodePosi(T)> child; //孩子向量(其长度总比key多一) // 构造函数(注意:BTNode只能作为根节点创建,而且初始时有0个关键码和1个空孩子指针) BTNode() { parent = NULL; child.insert ( 0, NULL ); } BTNode ( T e, BTNodePosi(T) lc = NULL, BTNodePosi(T) rc = NULL ) { parent = NULL; //作为根节点,而且初始时 key.insert ( 0, e ); //只有一个关键码,以及 child.insert ( 0, lc ); child.insert ( 1, rc ); //两个孩子 if ( lc ) lc->parent = this; if ( rc ) rc->parent = this; } }; -
B树:核心是由于插入上溢和由于删除下溢后的操作。
template <typename T> class BTree { //B-树模板类 protected: int _size; //存放的关键码总数 int _order; //B-树的阶次,至少为3——创建时指定,一般不能修改 BTNodePosi(T) _root; //根节点 BTNodePosi(T) _hot; //BTree::search()最后访问的非空(除非树空)的节点位置 void solveOverflow ( BTNodePosi(T) ); //因插入而上溢之后的分裂处理 void solveUnderflow ( BTNodePosi(T) ); //因删除而下溢之后的合并处理 public: BTree ( int order = 3 ) : _order ( order ), _size ( 0 ) //构造函数:默认为最低的3阶 { _root = new BTNode<T>(); } ~BTree() { if ( _root ) release ( _root ); } //析构函数:释放所有节点 int const order() { return _order; } //阶次 int const size() { return _size; } //规模 BTNodePosi(T) & root() { return _root; } //树根 bool empty() const { return !_root; } //判空 BTNodePosi(T) search ( const T& e ); //查找 bool insert ( const T& e ); //插入 bool remove ( const T& e ); //删除 }; //BTree
-
-
B树的操作:
-
查找算法:
- 只将必需的节点载入内存,减少IO操作。
- 如果查找失败,则必然失败于指向外部节点。
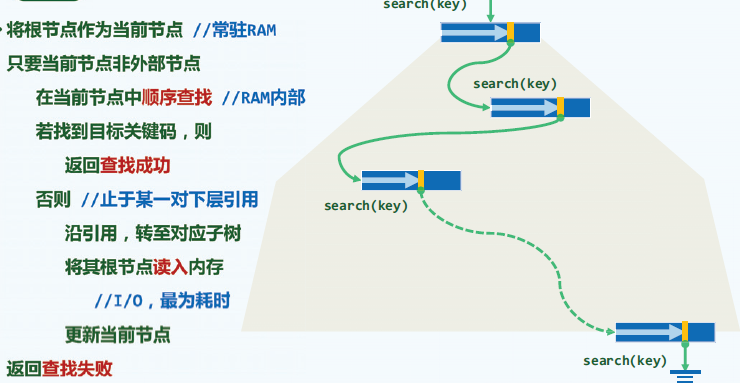
template <typename T> BTNodePosi(T) BTree<T>::search ( const T& e ) { //在B-树中查找关键码e BTNodePosi(T) v = _root; _hot = NULL; //从根节点出发 while ( v ) { //逐层查找 Rank r = v->key.search ( e ); //在当前节点中,找到不大于e的最大关键码 if ( ( 0 <= r ) && ( e == v->key[r] ) ) return v; //成功:在当前节点中命中目标关键码 _hot = v; v = v->child[r + 1]; //否则,转入对应子树(_hot指向其父)——需做I/O,最费时间 } //这里在向量内是二分查找,但对通常的_order可直接顺序查找 return NULL; //失败:最终抵达外部节点 } -
时间复杂度:
- 影响查找的最主要因素是树的高度。
- 时间的主要成本,是每次深入下一层时的IO操作。
- 时间的次要成本,是每次在超级节点内部的向量进行查找。
-
树高:含N个关键码的m阶B树。
- 最大树高:内部节点的分支数达到下界。
- h<=1+log[m/2] [(N+1)/2]。
- 对于含N个关键码的B树,则这颗B树有N+1个外部节点。
- 相对于BBST,树高降低至原来的1/(log2 m -1)。m=256时,约是1/7。
- 最小树高:内部节点的分支数达到上界。
- h>=logm(N+1)。
- 相对于BBST,树高降低至原来的logm 2 - logN 2。m=256时,约是1/8。
- 最大树高:内部节点的分支数达到下界。
-
iwehdio的博客园:https://www.cnblogs.com/iwehdio/

 浙公网安备 33010602011771号
浙公网安备 33010602011771号