利用 Intel Realsense做SLAM开发(一)
最近手里拿到一台Realsense D435,就是这个:
https://click.intel.com/intelr-realsensetm-depth-camera-d435.html
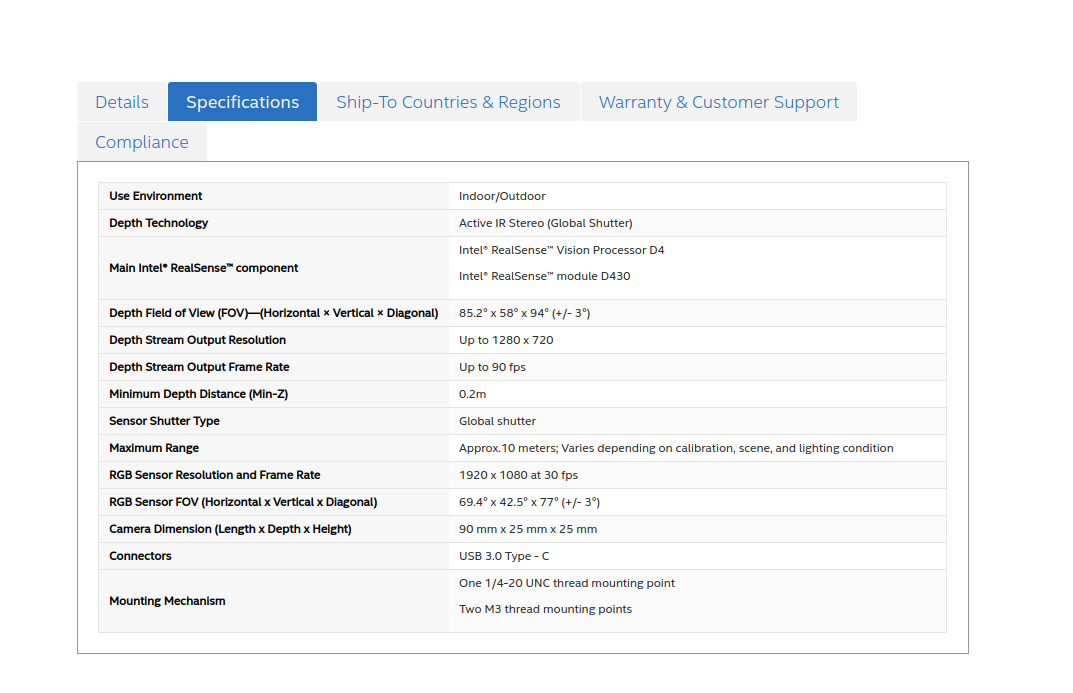
所以准备拿来做SLAM研究和开发,先上手试一试吧。先简单看一下参数,基于Active IR测深度,支持USB3.0接口:
拿到首先把配套的开发环境配好,然后跑一下demo。
软件可从官网地址下载:https://realsense.intel.com/sdk-2/
我的开发环境是Ubuntu 16.04.
安装按照:https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md
没有任何问题。
当然也可以源码编译安装:https://github.com/IntelRealSense/librealsense/blob/master/doc/installation.md
安装完成后可打开realsense-viewer,再连上D435,先把demo跑起来。这时候就出问题了,显示的是
No Frames Received!
Google之后发现不少人提了这个问题,一开始怀疑是USB接口的原因,确实,一开始接了USB2.0,之后换成USB3.0,依然不行………开始怀疑是不是该换个电脑了。
不过github上还有一种可行的解决方法,更新固件,于是抱着试一试的态度,参考:
https://www.intel.com/content/dam/support/us/en/documents/emerging-technologies/intel-realsense-technology/Linux-RealSense-D400-DFU-Guide.pdf
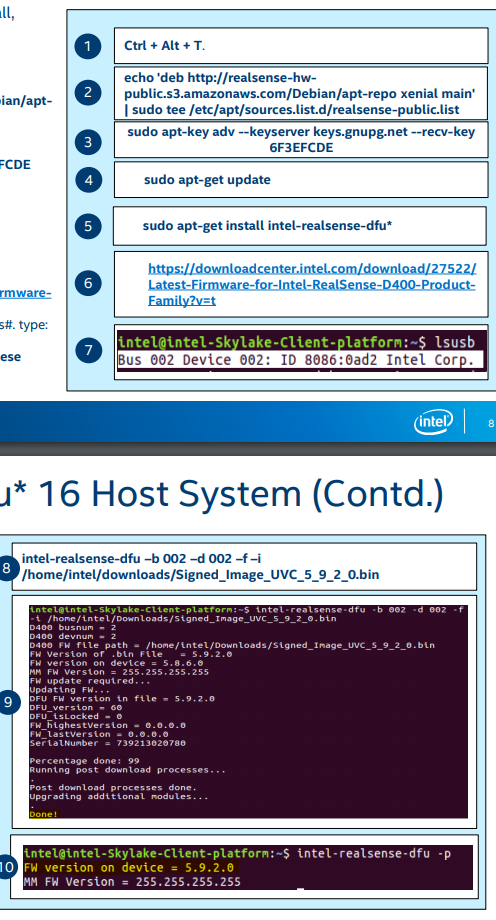
1. 打开终端2. 添加网址: i. echo 'deb http://realsense-hw-public.s3.amazonaws.com/Debian/aptrepo xenial main' | sudo tee /etc/apt/sources.list.d/realsensepublic.list [Enter] 3. 添加公钥: i. sudo apt-key adv --keyserver keys.gnupg.net --recv-key 6F3EFCDE [Enter] 4. 更新软件源: i. sudo apt-get update [Enter] 5. 下载dfu: i. sudo apt-get install intel-realsense-dfu* [Enter] 6. 下载最新固件更新包: i. 网址是: https://downloadcenter.intel.com/download/27522/Latest-Firmwarefor-Intel-RealSense-D400-Product-Family?v=t 7. 把你的D435插到USB3.1口(我的USB3.0也行). Check serial # and bus#. (以下步骤都是插入D435后完成的) i. 运行lsusb [Enter] ii. 注意“Intel Corp.” bus and device numbers; DFU tool uses these values to identify Intel® RealSense™ D400 series camera.
Installation Steps (Contd.) 8. Upgrade D400 Series Camera Firmware with Linux DFU Tool: i. 输入命令:这里-b和-d后面要改成你自己的bus和device编号,最后是你下载好的固件的bin文件 (This command specifies bus #, device #, -f flag to force upgrade, and –i flag for complete system path to downloaded FW.bin file.) intel-realsense-dfu –b 002 –d 002 –f –i /home/intel/downloads/Signed_Image_UVC_5_9_2_0.b in [Enter] 9. 这个时候更新就开始了,大概界面就是如下图的步骤9,等待完成. 10. 最后检查固件版本: i. Check firmware with command: intel-realsense-dfu –p [Enter]
下面的图片就是ppt里的10个步骤
更新完固件之后,就可以啦!我最新的版本号是5.10
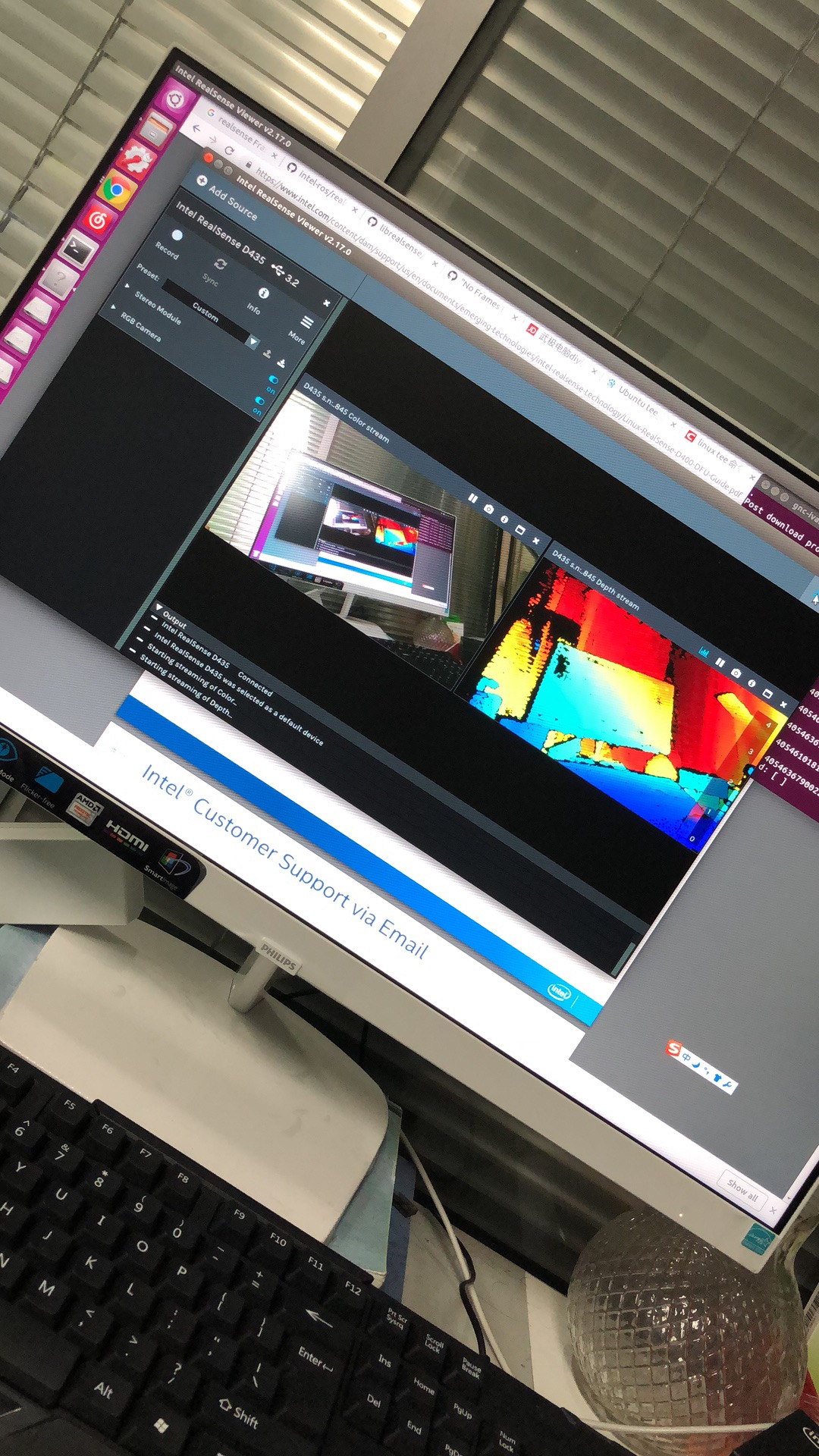
下面就可以用它跑跑其他程序试试

 浙公网安备 33010602011771号
浙公网安备 33010602011771号