【集群】Redis的哨兵模式和集群模式
哨兵模式
哨兵模式是redis高可用的实现方式之一
使用一个或者多个哨兵(Sentinel)实例组成的系统,对redis节点进行监控,在主节点出现故障的情况下,能将从节点中的一个升级为主节点,进行故障转义,保证系统的可用性。
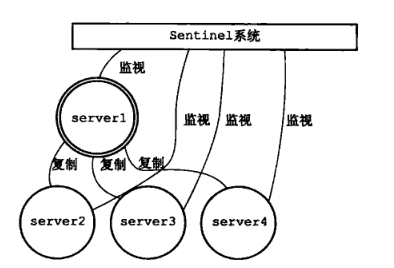
哨兵们是怎么感知整个系统中的所有节点(主节点/从节点/哨兵节点)的
- 首先主节点的信息是配置在哨兵(Sentinel)的配置文件中
- 哨兵节点会和配置的主节点建立起两条连接
命令连接和订阅连接 - 哨兵会通过
命令连接每10s发送一次INFO命令,通过INFO命令,主节点会返回自己的run_id和自己的从节点信息 - 哨兵会对这些从节点也建立两条连接
命令连接和订阅连接 - 哨兵通过
命令连接向从节点发送INFO命令,获取到他的一些信息
a. run_id
b. role
c. 从服务器的复制偏移量 offset
d. 等 - 因为哨兵对与集群中的其他节点(主从节点)当前都有两条连接,
命令连接和订阅连接
a. 通过命令连接向服务器的_sentinel:hello频道发送一条消息,内容包括自己的ip端口、run_id、配置纪元(后续投票的时候会用到)等
b. 通过订阅连接对服务器的_sentinel:hello频道做了监听,所以所有的向该频道发送的哨兵的消息都能被接受到
c. 解析监听到的消息,进行分析提取,就可以知道还有那些别的哨兵服务节点也在监听这些主从节点了,更新结构体将这些哨兵节点记录下来
d. 向观察到的其他的哨兵节点建立命令连接----没有订阅连接
哨兵模式下的故障迁移
主观下线
哨兵(Sentinel)节点会每秒一次的频率向建立了命令连接的实例发送PING命令,如果在down-after-milliseconds毫秒内没有做出有效响应包括(PONG/LOADING/MASTERDOWN)以外的响应,哨兵就会将该实例在本结构体中的状态标记为SRI_S_DOWN主观下线
客观下线
当一个哨兵节点发现主节点处于主观下线状态是,会向其他的哨兵节点发出询问,该节点是不是已经主观下线了。如果超过配置参数quorum个节点认为是主观下线时,该哨兵节点就会将自己维护的结构体中该主节点标记为SRI_O_DOWN客观下线
询问命令SENTINEL is-master-down-by-addr <ip> <port> <current_epoch> <run_id>
| 参数 | 意义 |
|---|---|
| ip/port | 当前认为下线的主节点的ip和端口 |
| current_epoch | 配置纪元 |
| run_id | *标识仅用于询问是否下线 有值标识该哨兵节点希望对方将自己设置为leader 询问时用*,选举时用run_id
|
leader选举
在认为主节点客观下线的情况下,哨兵节点节点间会发起一次选举,命令还是上面的命令SENTINEL is-master-down-by-addr <ip> <port> <current_epoch> <run_id>,只是run_id这次会将自己的run_id带进去,希望接受者将自己设置为主节点。如果超过半数以上的节点返回将该节点标记为leader的情况下,会有该leader对故障进行迁移
故障迁移
- 在从节点中挑选出新的主节点
a. 通讯正常
b. 优先级排序
c. 优先级相同是选择offset最大的 - 将该节点设置成新的主节点
SLAVEOF no one,并确保在后续的INGO命令时,该节点返回状态为master - 将其他的从节点设置成从新的主节点复制,
SLAVEOF命令 - 将旧的主节点变成新的主节点的从节点
优缺点
- 优点
高可用,在主节点故障时能实现故障的转移 - 缺点:好像没办法做到水平拓展,如果内容很大的情况下
集群模式
官方提供的分布式方案(槽指派/重新分片/故障转移)
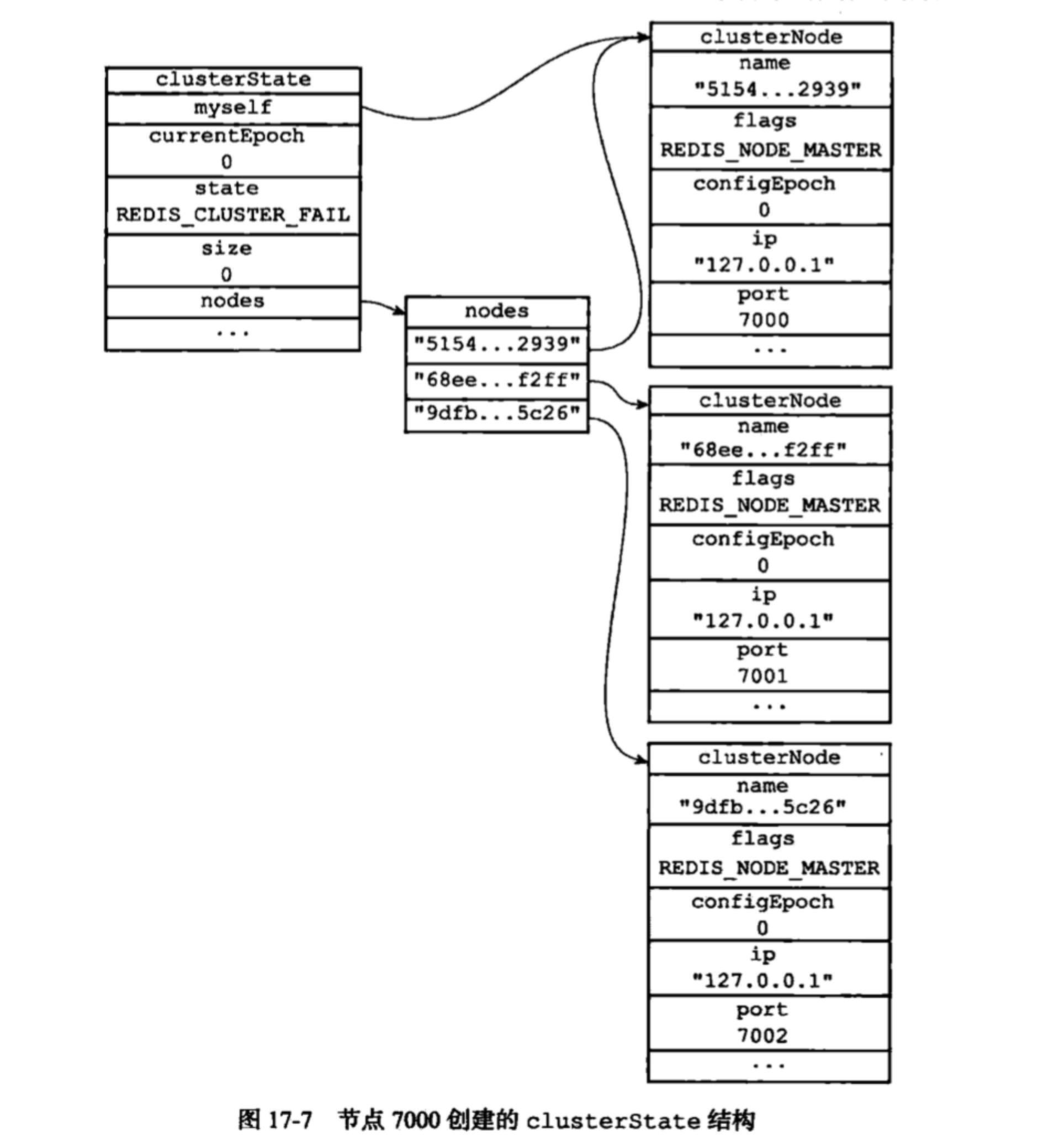
集群内的节点,都会有个数据结构存储整个集群内的节点信息
//整体
struct clusterState{
clusterNode *mySelf;
....
dict *nodes; //集群内的所有节点
}
// 单个节点
struct clusterNode {
char name[];
char ip[];
int port;
clusterLink *link; //保存节点间,连接的信息
int flags; //状态标记
}
//节点间连接的信息
struct clusterLink{
mstime_t ctime; //创建时间
int fd; //tcp套接字描述符
sds sndbuf; // 输出缓存区
sds rcvbuf; //输入缓存区
struct clusterNode *node;
}
槽指派
redis集群可以被分为16384个槽,只有这些槽全被指派了处理的节点的情况下,集群的状态才能是上线状态(ok)
操作redis集群的时候,将key作为参数,就可以计算出对应的处理槽上,所以存储等操作都应该在该槽对应的节点上。通过这种方式,可以完美的实现集群存储的水平拓展。
def slot_number(key):
return CRC16(key) & 16383
//得到的结果就是槽的序号
槽指派的信息是怎么存储的
struct clusterState{
clusterNode *slots[16384]
}
struct clusterNode{
unsigned char slots[16384/8]
}
通过上面两个结构体中的定义可以看出,槽指派的信息是分了两种方式,保存在结构体里面。


分两种存储的好处
1. 如果需要判断某一个节点负责的槽,只需要获取方式二中的数组做判断就可以
2.如果找某个槽是哪个节点负责,只需要获取方式一的列表,一查就知道
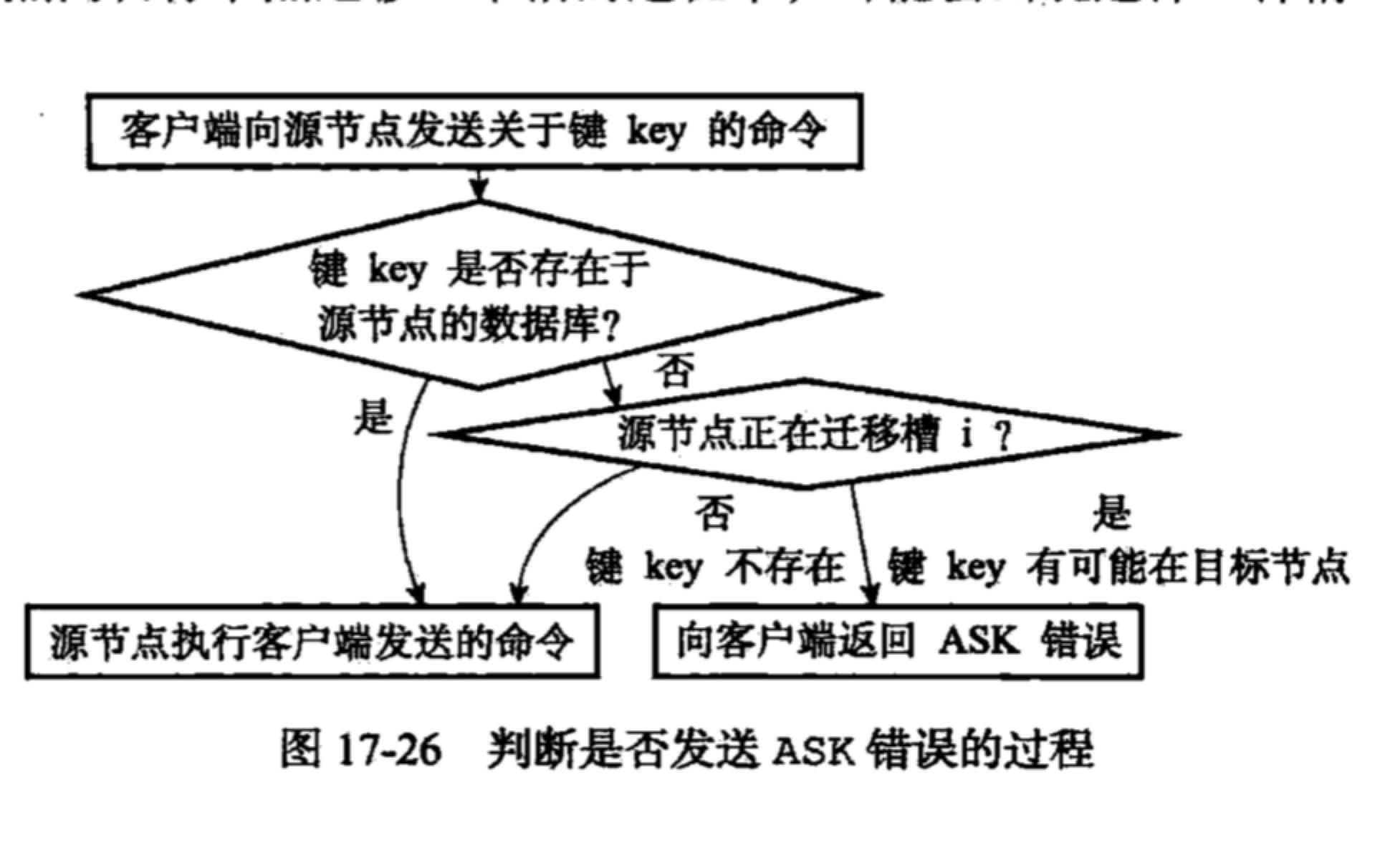
重新分片
将已经指派给节点的槽,重新执行新的节点。
故障转移
发现故障节点
- 集群内的节点会向其他节点发送PING命令,检查是否在线
- 如果未能在规定时间内做出PONG响应,则会把对应的节点标记为疑似下线
- 集群中一半以上
负责处理槽的主节点都将主节点X标记为疑似下线的话,那么这个主节点X就会被认为是已下线 - 向集群广播主节点X
已下线,大家收到消息后都会把自己维护的结构体里的主节点X标记为已下线
从节点选举
- 当从节点发现自己复制的主节点已下线了,会向集群里面广播一条消息,要求所有有投票权的节点给自己投票(
所有负责处理槽的主节点都有投票权) - 主节点会向第一个给他发选举消息的从节点回复支持
- 当支持数量超过N/2+1的情况下,该从节点当选新的主节点
故障的迁移
- 新当选的从节点执行
SLAVEOF no one,修改成主节点 - 新的主节点会撤销所有已下线的老的主节点的槽指派,指派给自己
- 新的主节点向集群发送命令,通知其他节点自己已经变成主节点了,负责哪些槽指派
- 新的主节点开始处理自己负责的槽的命令
集群模式和哨兵模式的区别
- 哨兵模式监控权交给了哨兵系统,集群模式中是工作节点自己做监控
- 哨兵模式发起选举是选举一个leader哨兵节点来处理故障转移,集群模式是在从节点中选举一个新的主节点,来处理故障的转移
转自:https://www.jianshu.com/p/d6d2325a5ec7

 浙公网安备 33010602011771号
浙公网安备 33010602011771号