关于控制论中Lyapunov的数学基础笔记
更新:2023.9.18
一、前言
关于为什么我一个学习图像的深度学习、神经网络的人突然学控制论,主要是因为在文章Lyapunov-stable neural-network control中使用了神经网络来表示一个系统,里面提到了诸多关于控制论中数学知识,特此记录一下学习过程,同时,这也是我第一篇主动写的博客。
二、什么是Lyapunov稳定(引言)
先拿日常生活中的实例举一个例子,你可以想象桌面上放着一个小碗,第一种情况是小碗表面完全光滑,不考虑存在的摩擦力。现在考虑如下三种情况:
- 将小球放在碗底:小球完全静止,我们可以认为这一运动系统是稳定的;
- 将小球放在碗面上:因为不存在摩擦力,我们考虑能量守恒,小球会在光滑的碗面上无止尽地来回滑动,我们同样也可以认为这一运动系统是稳定的;
- 将小球放在小碗外边的桌面上,并且不施加任何外力:小球保持完全静止,我们同样可以认为这一运动系统是稳定的。
现在我们假设碗面上存在摩擦力,其实我们只需要修改上述情况中的第二点,当我们将小球放置在粗糙的碗面上时,小球会在碗面上来回滑动,且逐渐趋向碗底,当能量消耗完时,小球静止在碗底。
通过观察实际生活中的例子,我们不难发现碗底和和桌面上任意一个点都是稳定点。并且对于碗底而言,所有释放在碗面上的点才算是稳定的,我的个人理解是稳定是有一定的范围的,当任意点初始点的系统都是稳定的,那我们就说这个是一个大范围稳定。
三、什么是Lyapunov稳定
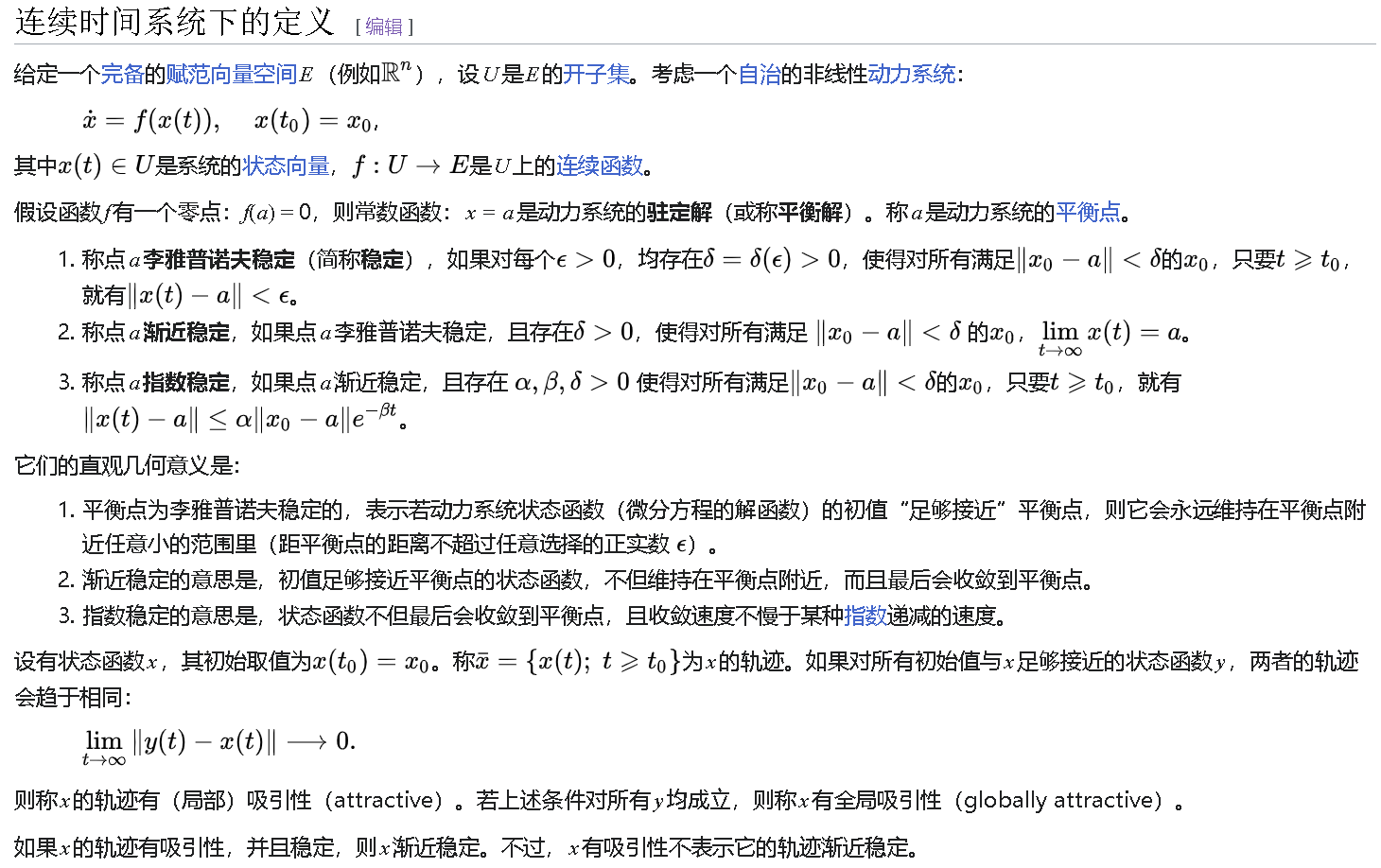
(该截图源于李雅普诺夫稳定性wiki)
四、如何判断某一个系统是否为Lyapunov稳定
1. 李雅普诺夫第一法
判定一个系统是否稳定,李雅普诺夫第一法是求解矩阵A的所有特征根是否都是非负,这个方法较为简单方便,但是唯一的问题是并不是所有的问题都能求出数值解,并且较为复杂的问题求特征根同样较为复杂。由于该方法理解较为方便,很多博客中都有许多解释,在这就不做赘述了;
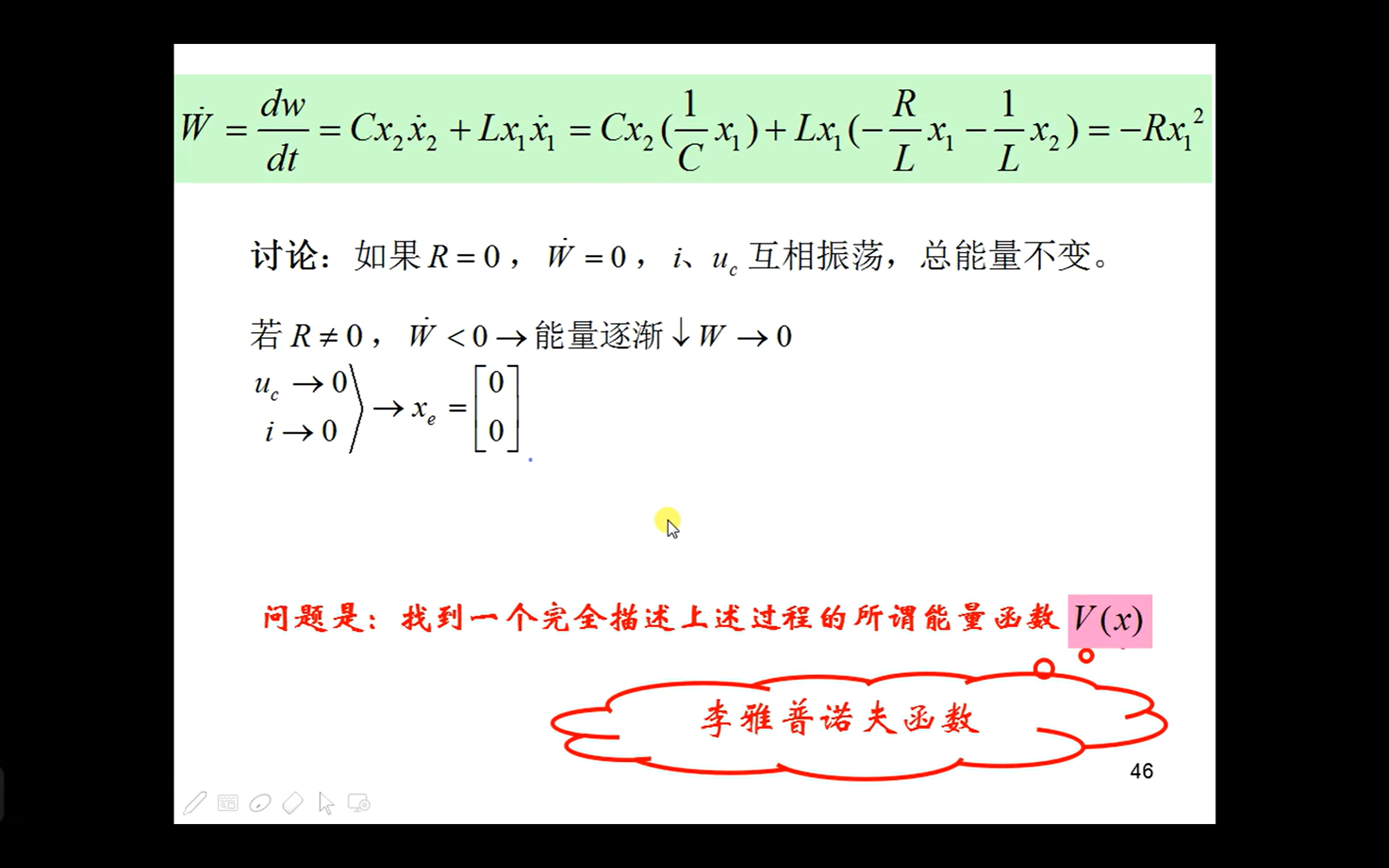
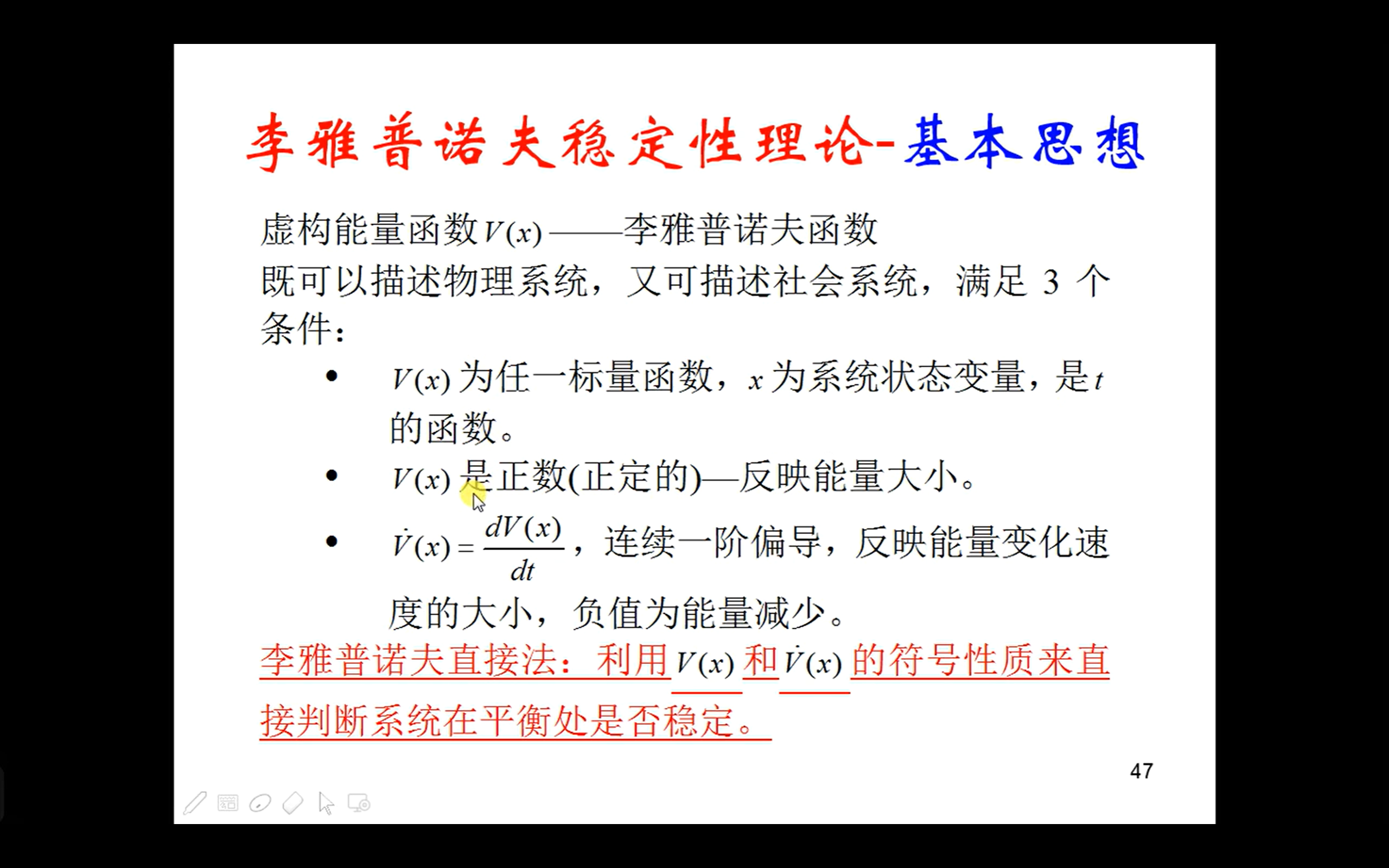
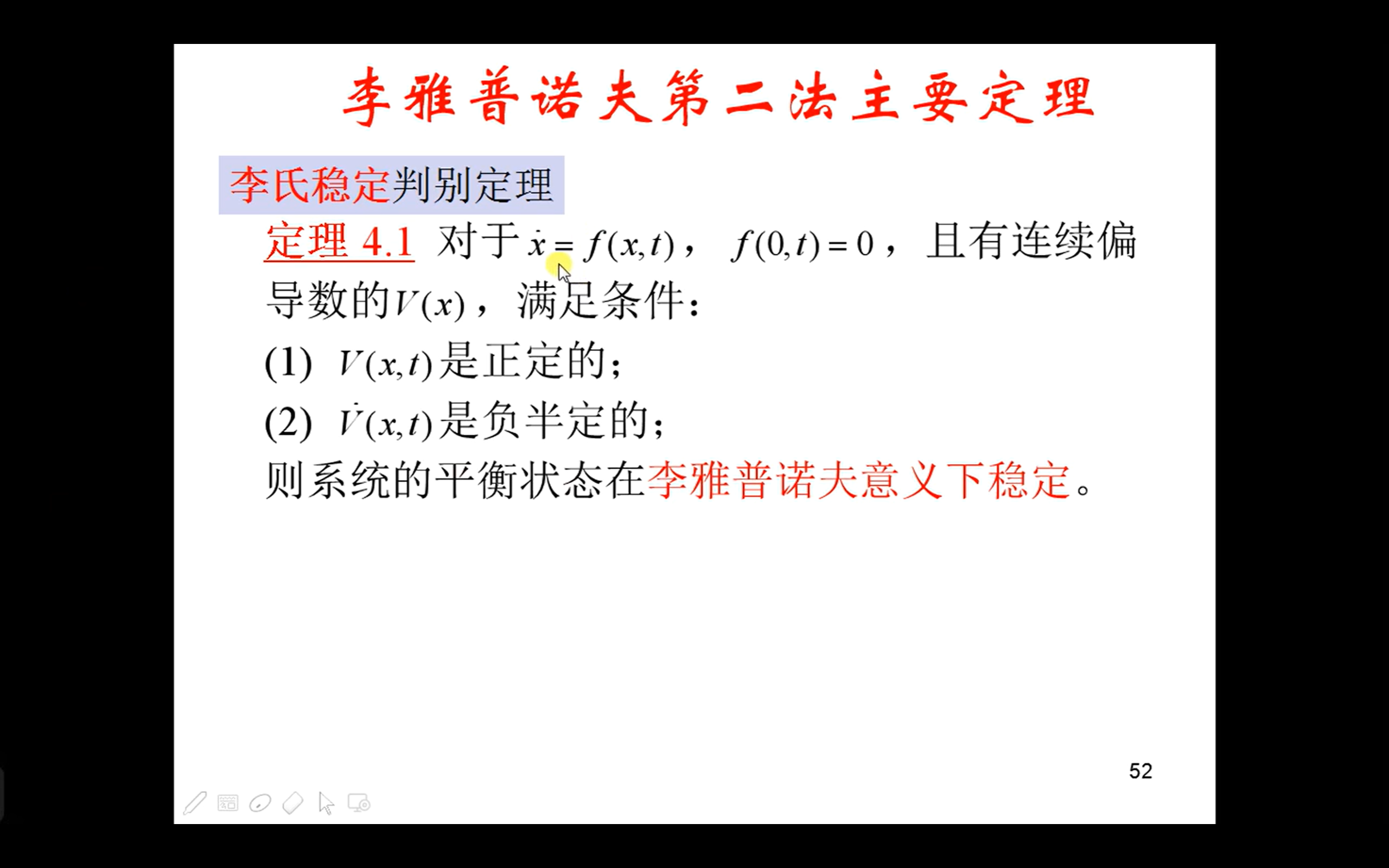
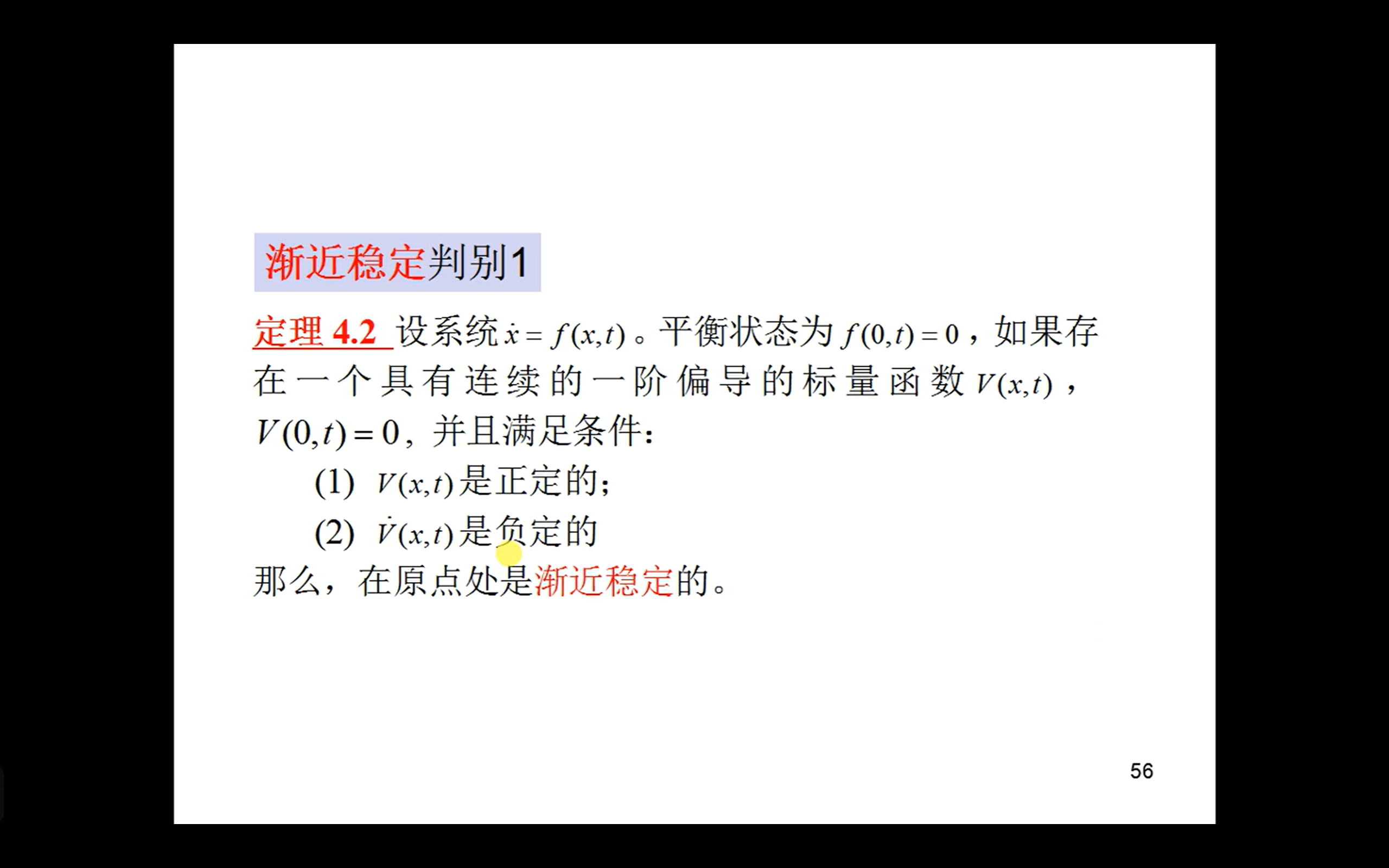
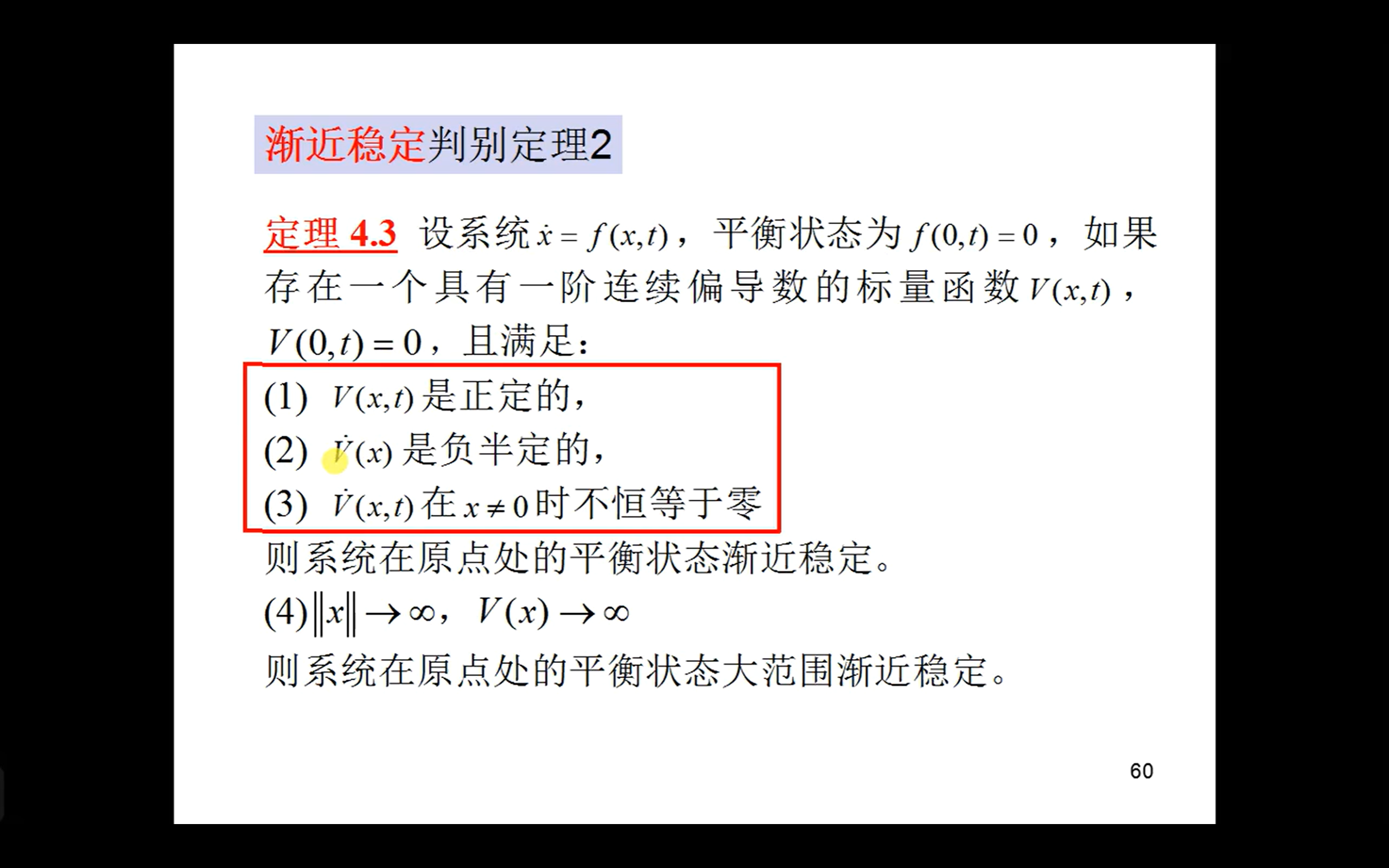
2.李雅普诺夫第二法
李雅普诺夫第二法则是构造一个Lyapunov函数证明函数稳定,在这个视频讲解了单摆和振荡电路模型,寻找的Lyapunov函数都为能量函数,并都证明其稳定性。Lyapunov函数必须包含所有的状态变量,按照我的理解,Lyapunov函数也是一个状态方程。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号