1. 说明
本文是来自忠厚老实的老王在B站讲的卡尔曼滤波,经过自己理解写的总结笔记,课讲的非常好,一定要去听
2. 贝叶斯公式和应用
对于事件A和B,设其同时发生的概率为\(P(A =a \bigcap B =b)\), 则存在:
\[P(A =a \bigcap B = b)=P(A=a|B=b) * P(B=b) = P(B=b|A=a) * P(A=a)
\]
这是数学本质,A和B同时发生的概率为发生B的概率和在发生B时发生A的概率的乘积,很好理解。
\[P(A=a|B=b) = \frac{P(B=b|A=a) * P(A=a)}{P(B=b)}
\]
经过变形可以得到,这就贝叶斯公式,
贝叶斯公式本质只是条件概率,如何基于这个公式对其进行应用呢?

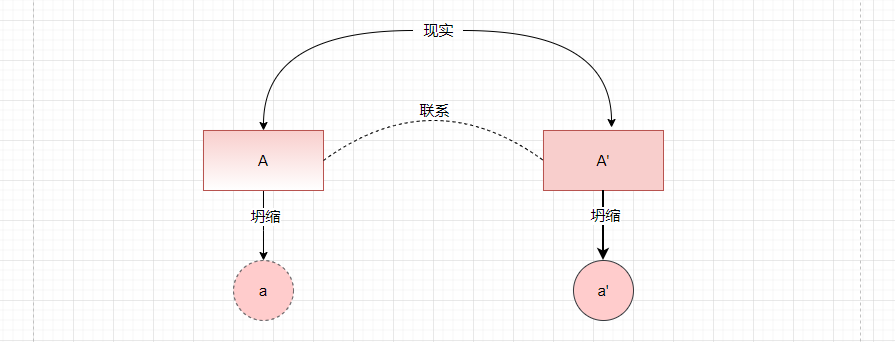
比如说测量现实温度,我们预设一个概率空间A对现实进行预测,我们当然可以通过加权积分的方式得到一个最终的预测值,但这个预设的概率空间的准确性很一般,这个时候,找到了一个它的影子A',他们之间相关,而且状态空间A‘在现实中能够直接观测到一个结果a',也就说明在这个现实下A’是朝着a'进行塌缩的,那么相对应的A会朝着相似的方向塌缩成a,所以只需要知道A, A‘, a',还有A与A’之间的联系,就能够确定a了
有两个温度计A和B,要测量今天的温度,测得如下结果:
\(P(A=10) = 0.8, P(A=11) = 0.2\)
\(P(B=10) = 0.7, P(B=11) = 0.2\)
而且温度计B在出厂的时候测的和A的相关关系为:
\(P(B=11|A=10) = 0.3\)
\(P(B=10|A=10) = 0.6\)
现在,我们想要结合两个测量结果让结果更准确,让B去修正A,根据贝叶斯公式:
\(P(A = 10|B = 10) = \frac{P(B = 10|A = 10) * P(A = 10)}{P(B = 10)} = \frac{0.6 * 0.8}{0.7} = 0.685\)
当B=10的时候也就是说在一次观测中B这个系统朝着B=10这个方向塌缩了, 此时A也跟着塌缩P(A=10 | B= 10) =0.685, 和最初的\(P(A=10)=0.8\)相比就进一步收敛了,当然这里还遗留了一个问题:B=11的时候呢?这就属于另一个问题,多次观测的塌缩融合问题,后文另提
-
如何理解似然
\(P_{A|B}(a|b) = \frac{P_{B|A}(b|a) * P_{A}(a)}{P_{B}(b)}\) 通常为 \(后验估计 = \frac{似然 * 先验估计}{概率}\) ,
其中\(P_{B|A}(b| a)\)叫做似然概率,表示事件a事件b发生的概率,这个值是一个固定值,只是表示的是A和影子状态B之前的相关性仅此而已,和\(P_{A}(a)\)大小无关,不会随着猜测\(P_{A}(a)\)的改变而改变,是一个预设值,表示两个系统的相关性。
3. 连续贝叶斯公式
在连续的概率分布中,只有单点概率密度而没有单点的概率,单点概率为0,但还是要计算概率为此要使用微分的思想化积为加,对于一个连续的贝叶斯概率\(P(X<x | Y =y)\)推导推导过程如下:
\[\begin{align*}
P(X<x | Y =y) &= \sum_{u=-\infty}^{x}P(X=u | Y=y) \hspace{1.2cm}化连续为累加\\
&= \sum_{u=-\infty}^{x}\frac{P(Y=y |X=u)P(X=u)}{P(Y=y)} \hspace{1.2cm}使用离散贝叶斯公式\\
&= \lim_{\varepsilon \to \infty} \sum_{u=-\infty}^{x}\frac{P(y<Y<y+\varepsilon |X=u)P(u<X<u + \varepsilon)}{P(y<Y<y+\varepsilon)} \hspace{1.2cm}单点概率为0,用无穷小量表征连续性 \\
&=\lim_{\varepsilon \to \infty} \sum_{u=-\infty}^{x}\frac{(f_{Y|X}(\xi_1|u)\times\varepsilon)(f_X(\xi_2)\times \varepsilon)}{f_Y(\xi_3)\times \varepsilon} \hspace{1.2cm} 其中 \xi_1 \in(y, y+\varepsilon), \xi_2 \in(u, u+\varepsilon), \xi_3 \in(y, y+\varepsilon) \\
&=\lim_{\varepsilon \to \infty} \sum_{u=-\infty}^{x}\frac{(f_{Y|X}(y|u))(f_X(u))}{f_Y(y)}\times \varepsilon \hspace{1.2cm} 使用积分中值定理\\
&=\int_{-\infty}^{x} \frac{(f_{Y|X}(y|u))(f_X(u))}{f_Y(y)}d(u)
=>\int_{-\infty}^{x} \frac{(f_{Y|X}(y|x))(f_X(x))}{f_Y(y)}d(x) \hspace{1.2cm}(连续贝叶斯)
\end{align*}
\]
最后的形式和离散贝叶斯很像,但是却变成了概率密度的相乘,多了个积分符号的dx, 其实很好理解,从推导的过程中可以知道,使用【概率密度*dx】代替【概率】后,分子分母约掉了一个dx,同时把整个x域的概率加起来
因为\(f_{Y}(y)\)可以通过全概率密度的方式计算出来,
\[f_{Y}(y) = \int_{x= -\infty}^{x=+\infty} f_{Y|X}(y|x)f_X(x)dx
\]
所以连续贝叶斯公式还有另一个形式
\[P(X<x | Y =y) = \int_{-\infty}^{x} \eta(f_{Y|X}(y|x))(f_X(x))d(x) \\
其中\eta = \frac{1}{f_{Y}(y)} = \frac{1}{\int_{-\infty}^{+\infty} f_{Y|X}(y|x)f_X(x)dx}
\]
4. 贝叶斯滤波
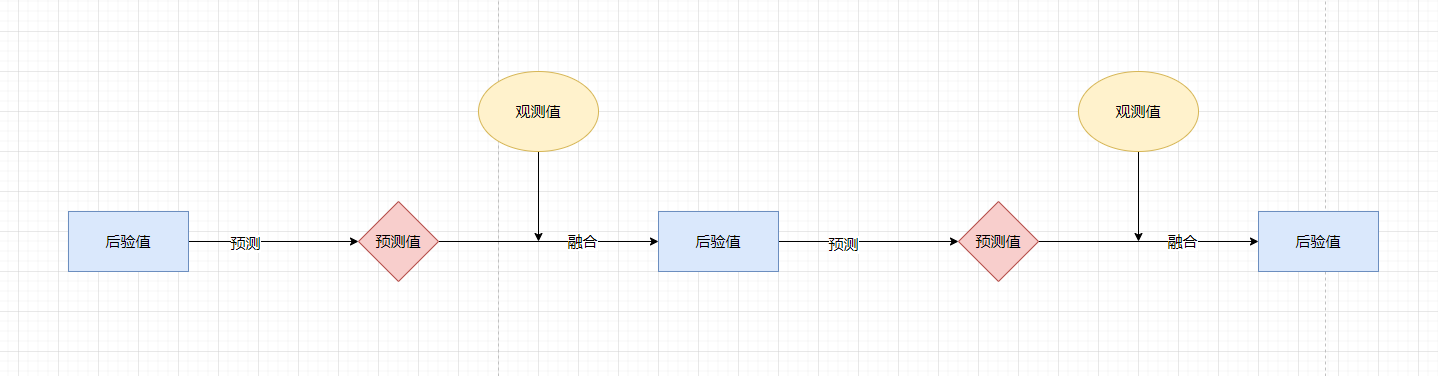
在推导了连续的贝叶斯公式后,接下来就能够推导贝叶斯滤波算法,贝叶斯滤波基于贝叶斯概率的思想,首先对观测的建模得到预测方程,就能够基于前一个状态对下一个状态进行预测,同时对下一个状态进行观测得到预测方程,最终将两者融合后就能够得到一个比较准确的后验,整个过程如下所示:
对于贝叶斯滤波算法的开始需要预测方程和观测方程
**预测方程:$$X_{k} = f(X_{k-1}) + Q_{K} $$, **
**观测方程: \(Y_k = h(X_{K}) + R_{k}\) **
\(X_{k-1}:\) K-1时刻状态X的实际值
\(X_{k}:\) K时刻状态X的预测值
\(f:\) 前一状态和当前时刻的关系
\(h:\) 实际值和观测值的关系
\(Q_{K}:\) k时刻预测随机噪声
\(R_k:\) k时刻的观测噪声
\(Y_k:\) k时刻的观测值
其中: \(X_0, Q_1,Q_2...Q_K, R_1, R_2....R_k\) 相互独立
并且有观测值: \(y_1, y_2, ... , y_n\)
设\(X_0\)以及X的概率密度函数\(f_{x0}(x)\), \(Q_K\)的概率密度函数\(f_{Q_k}(x)\), \(R_K\)的概率密度函数\(f_{R_k}(x)\)
注意,此处的预测方程和观测方程中变量都是\(X_k, Y_k\)而不是\(x_k, y_k\), 表示的还是一个范围下的随机变量;
预测方程使用\(f\)做$ X_{k}\(的随机过程对系统进行模拟建模,同时用噪声\)Q_{K}$去1.弥补建模的不准确。 2.模拟实际中存在的噪声
观测方程是在预测方程的基础上,使用\(h\)对预测出来的系统状态\(X_{k}\)做从系统状态到状态的转换,用\(R_{k}\)去模拟观测噪声
这个时候再回到贝叶斯思想的本身去看这两个方程,为了得到系统状态,利用随机过程对系统进行建模得到预测方程A,由于这个模型是不准的,为此找了与A有联系的影子A’,A‘能在现实中坍缩成a’,所以A也会朝着这个方向塌缩成a;\(X_{k}\)就是A, 而\(Y_{k}\)就是A’,要谨记它们不是一个具体的值,而是概率空间下的随机变量,\(R_{K}\)和\(Q_{K}\)是让两个系统成为概率空间的原因;此外将\(X_{K}代入Y_{k}可以得到Y_{k} = h(f(x_{k-1} + R_{k}) + Q_{K})\) , 提醒我们\(Y_{k}与X_{K}的关联性经过了两个随机噪音R_k和Q_K,所以成了概率关系\)
-
推导过程
\[目标式: f_{X}^{+} (x) = \eta(f_{Y|X}(y|x))f_{X}^{-}(x) \\
\eta = \frac{1}{f_{Y}(y)} = \frac{1}{\int_{-\infty}^{+\infty} f_{Y|X}(y|x)f_X(x)dx}
\]
\(f_{X}^{+}(x)\): x的后验概率密度也就是\(f_{X|Y}(x|y)\)的简略写法
\(f_{X}^{-}(x)\): x的先验概率密度,从观测方程得出
y: 观测值y
此处的目标是只需要求出\(f_{X}^{+}(x)\)即可,有了概率密度函数后,后验x值使用积分\(x_{}^{+} = \int_{-\infty}^{+\infty}xf_{X}^{+}(x)dx\)计算可得
先验\(f_{X}^{-}(x)\)的推导,概率是概率密度的积分,要求概率密度,对概率求导即可
\[P(X_{1}<x)=\sum_{u = -\infty}^{x}P(X_{1} = u) \\
\begin{align*}
P(X_{1}=u)&=\sum_{v=-\infty}^{+\infty}P(X_{1}=u| X_{0}=v)P(X_0=v)(全概率)\\
&=\sum_{v=-\infty}^{+\infty}P(X_1 - f(X_0) = u -f(v)|X_0=v)P(X_0=v)\\
&=\sum_{v=-\infty}^{+\infty}P(Q_1 = u -f(v)|X_0=v)P(X_0=v)\\
&=\sum_{v=-\infty}^{+\infty}P(Q_1 = u -f(v))P(X_0=v) \hspace{1cm} Q_1与上一轮的X值X_0独立\\
&=\lim_{\varepsilon \to 0} \sum_{v=-\infty}^{+\infty}f_{Q_1}(u -f(v))\cdot \varepsilon \cdot f_{X_0}(v) \cdot \varepsilon \hspace{1cm} 化概率为概率密度\\
&=\lim_{\varepsilon \to 0} \int_{v=-\infty}^{+\infty}f_{Q_1}(u -f(v))f_{X_0}(v)d(v) \cdot \varepsilon \hspace{1cm} 将\varepsilon等效为微分d(v)\\
\end{align*}
\]
\[\begin{align*}
\therefore P(X_{1}<x)&=\sum_{u = -\infty}^{x}P(X_{1} = u) \hspace{11cm}\\
&= \sum_{u=-\infty}^{+\infty}{}\lim_{\varepsilon \to 0} \int_{v=-\infty}^{+\infty}f_{Q_1}(u -f(v))f_{X_0}(v)d(v) \cdot \varepsilon\\
&= \int_{-\infty}^{x} \int_{v=-\infty}^{+\infty}f_{Q_1}(u -f(v))f_{X_0}(v)d(v)d(u)\\
\end{align*}
\]
\[\therefore f_{X_1}^{-}(x) = \frac{d(P(X_1 < x))}{dx} = \int_{v=-\infty}^{+\infty}f_{Q_1}(u -f(v))f_{X_0}(v)d(v) \hspace{2cm}(变限积分求导)
\]
似然\(f_{Y|X}(y|x)\)的推导, 思路也是一样,对概率取一个微积分空间然后求导
\[\begin{align*}
f_{Y_1|X_1}(y_1|x_1) &= \lim_{\varepsilon \to 0} \frac{P(y_1 < Y_1 <y_1 + \varepsilon | X_1 = x)}{\varepsilon}\\
&=\lim_{\varepsilon \to 0} \frac{P(y_1 -h(x)< Y_1 -h(X1) <y_1-h(x) + \varepsilon | X_1 = x)}{\varepsilon}\\
&=\lim_{\varepsilon \to 0} \frac{P(y_1 -h(x)< R_1 <y_1-h(x) + \varepsilon | X_1 = x)}{\varepsilon}\\
&=\lim_{\varepsilon \to 0} \frac{P(y_1 -h(x)< R_1 <y_1-h(x) + \varepsilon)}{\varepsilon} \hspace{2cm} 观测噪声R_1与X_1独立\\
&= f_{R_1}(y_1 - h(x))
\end{align*}
\]
最后后验概率的值为:
\[f_{1}^{+}(x) =\eta_{1} \cdot f_{R_1}[y_1 - h(x)] \cdot f_{X_1}^{-}(x) \\
\eta_{1} = \frac{1}{f_{Y_1}(y)} = \frac{1}{\int_{-\infty}^{+\infty} f_{R_1}[y_1 - h(x)]f_{X_1}^{-}(x)dx} \\
\]
5. 卡尔曼滤波
**预测方程:$$X_{k} = F(X_{k-1}) + Q_{K} $$, **
**观测方程: \(Y_k = H(X_{K}) + R_{k}\) **
由于贝叶斯滤波的每一步推导都有无穷积分,而无穷积分解析解一般不存在导致贝叶斯滤波难以落地,为此做了两个:
- f和h都假设为线性关系
- \(Q_k,R_k\)假设为正态噪声服从$Q_k服从N(0,Q), R_K服从N(0,R) $ ,这就是卡尔曼滤波
假设\(X_{K-1} 服从 N(u_{k-1}^{+}, \sigma_{k-1}^{+})\),先验\(f_{K}^{-}(x)\)的计算如下
\[\begin{align*}
f_{X_k}^{-}(x) &= \int_{-\infty}^{+\infty}f_{Q}[x-f(v)]f_{X_{k-1}}^{+}(v)dv \hspace{3cm} (1)\\
&= \int_{-\infty}^{+\infty}(2\pi Q)^{-\frac{1}{2}} \cdot
e^{-\frac{(x-Fv)^2}{2Q}} \cdot (2\pi \sigma_{k_{j-1}}^{+})^{-\frac{1}{2}} \cdot e^{\frac{(v - u_{k-1}^{+})^2}{2\sigma_{k-1}^{+}}} \cdot dv
\end{align*}
\]
这个积分想要进一步化简并不容易,但仔细观察(1)参考此文可以发现这实质是\(f_{Q}和f_{X_{k-1}}^{-}\)卷积的过程,时域的卷积就等于频域的乘积,可以通过傅里叶变化计算完后逆变换回来,最后计算得
\[f_{X_k}^{-}(x) \sim N(u_{k}^{-}, \sigma_{k}^{-}) \\
u_{k}^{-} = F \cdot u_{k-1}^{+},\hspace{1cm} \sigma_{k}^{-}=F^2 \sigma_{k-1}{+}Q
\]
对于后验\(f_{X_k}^{+}\)
\[\begin{align*}
f_{X_k}^{+} &= \eta f_{R}(y_{k} - h \cdot x) \cdot f_{x_k}^{-}(x)\\
&= \eta (2 \pi R)^{-\frac{1}{2}} \cdot e^{\frac{(y_k-hx)^2}{2R}} \cdot (2\pi \sigma_{k}^{-})^{-\frac{1}{2}} \cdot e^{\frac{(x-u_{k}^{-})^2}{2\sigma_{k}^{-}}} \\
\end{align*}
\\
\eta=\frac{1}{\int_{-\infty}^{+\infty}(2 \pi R)^{-\frac{1}{2}} \cdot e^{\frac{(y_k-hx)^2}{2R}} \cdot (2\pi \sigma_{k}^{-})^{-\frac{1}{2}} \cdot e^{\frac{(x-u_{k}^{-})^2}{2\sigma_{k}^{-}}}} \\
\]
最后计算得到
\[最后计算得到 X_{k}^{+} \sim N(u_{k}^{+}, \sigma_{k}^{+}) \\
其中 u_{k}^{+} = \frac{h\sigma_{k}^{-}y_{k} + Ru_{k}^{-}}{h^2\sigma_{k}^{-} + R},
\sigma_{k}^{+} = \frac{R\sigma_{k}^{-}}{h^2\sigma_{k}^{-}+R}\\
=> X_{k}^{+} \sim N(\frac{h\sigma_{k}^{-}y_{k} + Ru_{k}^{-}}{h^2\sigma_{k}^{-} + R},
\frac{R\sigma_{k}^{-}}{h^2\sigma_{k}^{-}+R})
\]
令\(k=\frac{h\sigma_{k}^{-}}{h^2\sigma_{k}^{-} + R}\), 则
\[u_{k}^{+} = u_{k}^{-} +k*(y_{k} - hu_{k}^{-})\\
\sigma_{k}^{+}=(1-kh)\sigma_{k}^{-}
\]
最终所有公式为
\[先验期望:u_{k}^{-} = F \cdot u_{k-1}^{+} \\
先验方差:\sigma_{k}^{-}=F^2 \sigma_{k-1}{+}Q\\
后验期望:u_{k}^{+} = u_{k}^{-} +k*(y_{k} - hu_{k}^{-})\\
后验方差:\sigma_{k}^{+}=(1-kh)\sigma_{k}^{-}\\
其中:k=\frac{h\sigma_{k}^{-}}{h^2\sigma_{k}^{-} + R}
\]
会发现结果已经没有别的概率,只是期望和方差的加加减减,这是因为高斯函数的运算具有封闭性。
6. 矩阵形式的卡尔曼滤波
期望\(u_{k}^{-}\)变成了向量$\vec{u_{k}^{-}} \(, 方差\)\sigma_{k}\(变成了协方差矩阵\)\Sigma_{k}$,关于正太分布中为什么方差变成了协方差矩阵参考多维高斯分布:

其中要特别注意,构建协方差矩阵时,不是用\(X^2\Sigma\),而是用\(X^T\Sigma X\)这样的形式,因为这种形式算下来最后是一个1x1的值;
矩阵形式的卡尔曼滤波如下:小写的\(\sigma,h\)变成了矩阵形式大写的\(\Sigma,H\), 1变成了单位矩阵\(I\)
\[\vec{u_{k}^{-}} = F \cdot \vec{u_{k-1}^{+}}\\
{\Sigma_{k}^{-}}=F {\Sigma_{k-1}^{+}}F^T+Q\\
\vec{u_{k}^{+}} = \vec{u_{k}^{-}} + k*(\vec{y_{k}} - H\vec{u_{k}^{-}})\\
{\Sigma_{k}^{+}}= {(I-kH)\Sigma_{k}^{-}}\\
其中: k=\frac{H{\Sigma_{k}^{-}}}{H\Sigma_{k}^{-}H^T + R}
\]
7. 应用
用来做系统预测的时候,一定会首先建模
**预测方程:$$X_{k} = F(X_{k-1}) + Q_{K} $$, **
**观测方程: \(Y_k = H(X_{K}) + R_{k}\) **
其中有一些要点,
1是F会导致预测模型是否能够拟合实际, 建模可以傻瓜式建模\(X_{k} = X_{k-1} + Q_{K}\), 使用\(Q_K\)去做修正,但会不准确
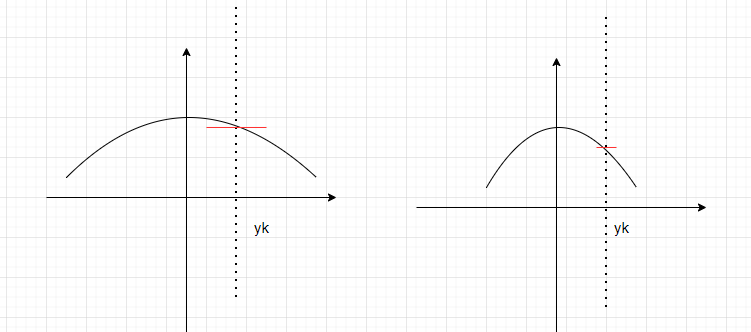
2.是Q和R,观测值yk的出现后会R的大小会决定\(Y_k\)的塌缩程度,如果\(R_k\)小说明\(Y_k\)这个系统值很集中塌缩值要求很精确,所以要求输入得\(X_k\)也要塌缩的精确,这时候候\(x_{k}^{+}\)就更靠近 \(y_k\),所以说我们更相信观测值;相反\(R_K\)大说明\(Y_k\)系统值塌缩得不准确,那么\(X_k\)塌缩得范围也大一些就会靠近自己得先验均值,这个时候就说$x_{k}^{+} $更靠近预测值
3.是预测值\(X_0\)的初值随便设置没关系的原因,X0设置的粗糙只是说系统一开始粗糙,但观测方程的塌缩,会让结果塌缩到正确的点,初值影响并不太大。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号