
机器人学 —— 机器人感知(Mapping)
对于移动机器人来说,最吸引人的莫过于SLAM,堪称Moving Robot 皇冠上的明珠。Perception 服务于 SLAM,Motion Plan基于SLAM。SLAM在移动机器人整个问题框架中,起着最为核心的作用。为了专注于Mapping,此章我们假设 Location 是已知的。
1、Metric Map
轨迹规划任务是再Metric Map的基础上完成的。当然,层次最高的是语意图,语意图是未来研究的热点方向。获取Metric Map 的难度最大之处在于:1、传感器噪声(May be solved by PGM; 2、机器人在移动(Location 问题);
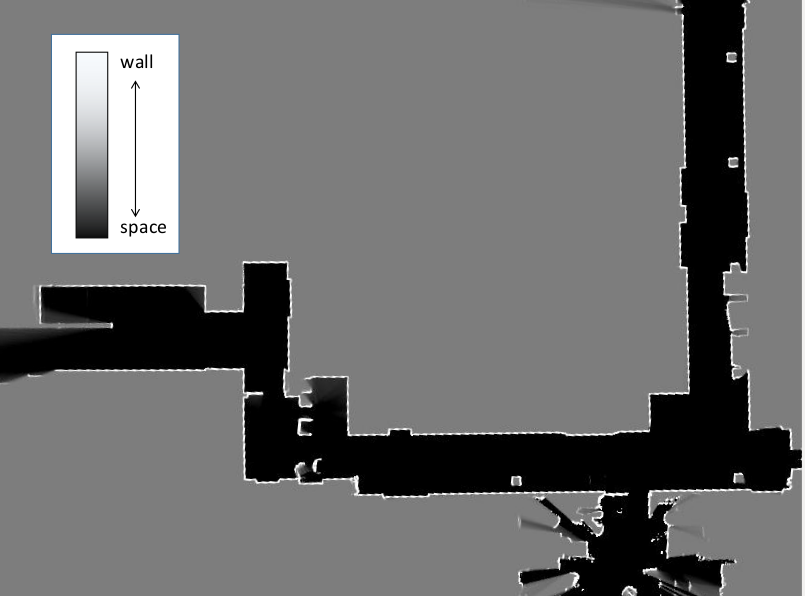
常见的MAP是基于UGV而言的, 使用的地图是Occupancy Map,与之前在轨迹规划栏目中的图一样,以 0 表示无法到达的区域,以 1 表示可以达到的区域。
2、传感器噪声问题的Naive Solution
解决传感器噪声问题的方法是对传感器进行建模,其模型为概率模型:
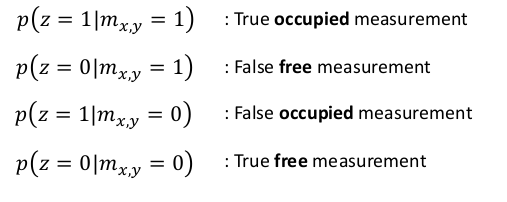
对于给定的观测,其factor 如上,当连续N次观测到同一个xy的值时,利用 factor product,即可获得n次观测的Joint CPD ,在Joint CPD 上运行MAP算法,即可获得最终的地图了。在通解的基础上,确实是这样设计算法的,但是我们目前面对的Mapping 问题还太Naive,不需要如此复杂的手段。
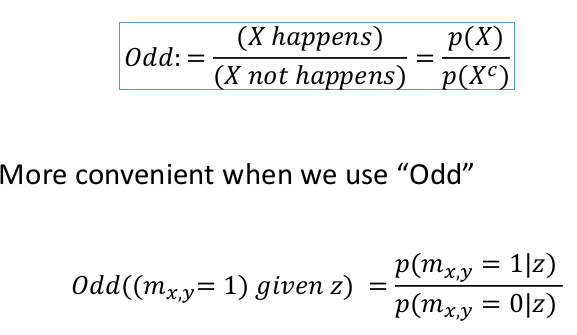
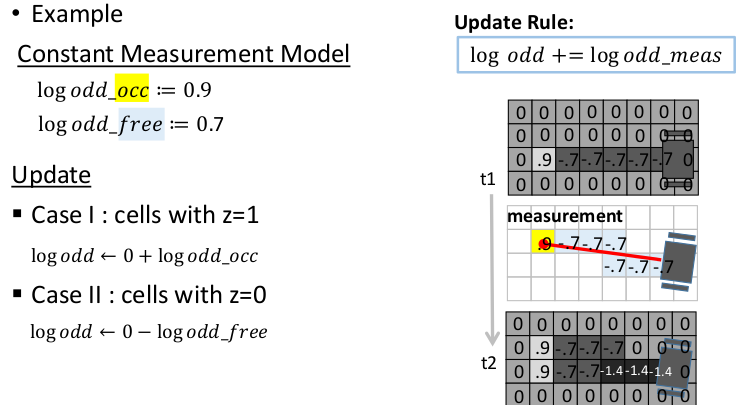
此处定义了一个odd,表示发生与否可能性的比值。换言之,就是传感器出错的概率比,这是一个可以估计的量。比如传感器测出有物体的odd是2,没物体的odd是3.
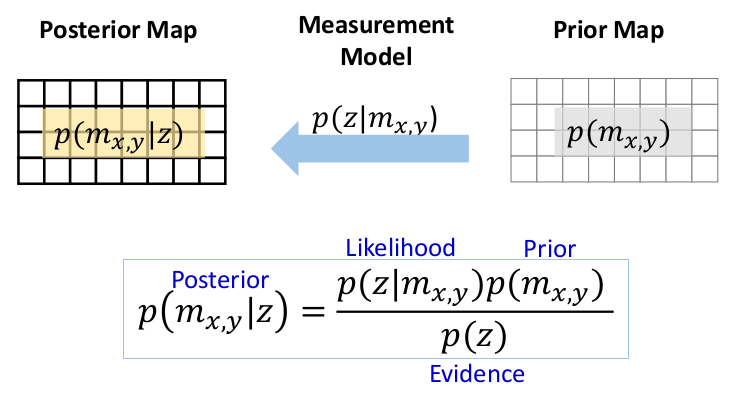
依据Beyes 公式把Odd展开:

其中,p(m = 1|z)/p(m = 0/z) 表示的是测量完成后 odd 的值,它等于 此次测量值 + 之前的odd。
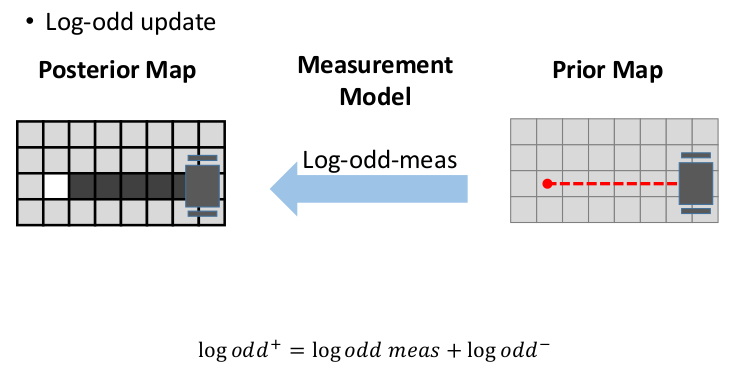
换言之,我们只要定义好先验图与log-odd-meas,就可以了。
3、Mapping Algorithm
所有的东西总是说起来容易做起来难。即使是如此Naive的Map,真正Coding还是很难的。尤其是如何高效的实现Map的更新,此外,机器人每次发出的激光线达上千条,每个位姿都要更新上前个点。对此问题,我设计了并行算法,即使在并行的条件下,生成一次Map也要近20s.
算法流程如下:
1、将激光击中的点变换到全局坐标系下
2、利用Breshenman 算法,获取激光通过的路径
3、获取Occupied Map 与 Free Map
4、更新Map.
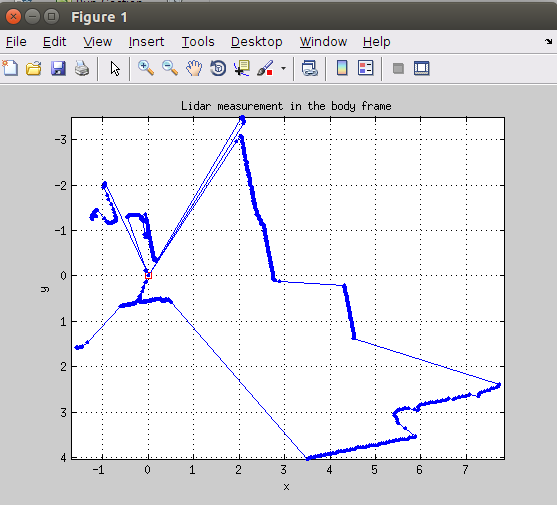

左图是单次测量的图,也就是机器人一个位姿的测量结果。显然,在靠近机器人的地方,噪声严重。右图是机器人在空间中移动后最终的Map。
4、3D Mapping
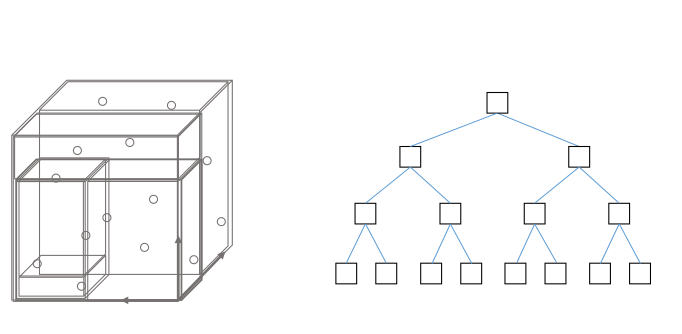
对于2维地图,我们采用 free+occupy 的形式储存空间中的障碍物。然而有障碍物的地方毕竟还是少数,或者说,地图是稀疏的。
对于3维数据而言,我们用3维的空间来描述显然不划算,由其是当空间巨大时。此时我们选择的地图,或者说是数据结构是kd-tree 与 OcTree. 此部分内容在点云相关博客中有过介绍,不赘述。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号