
北云GPS
基于DTU的差分链路方案
使用的是北云的差分链路方案。
DTU作用:相当于一根无线的串口线,一端发出串口数据,一端接收串口数据
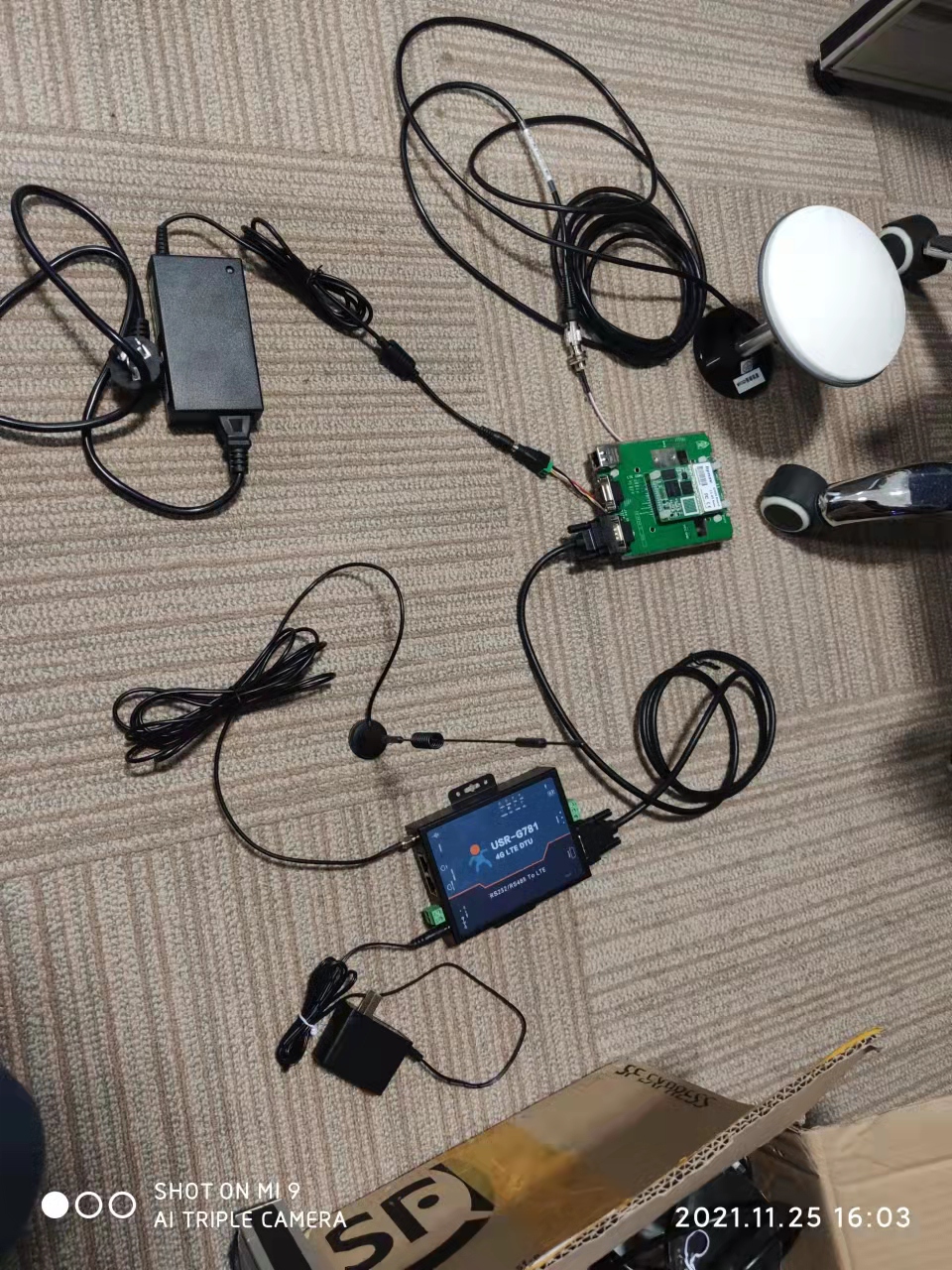
DTU硬件:
2套DTU设备,
电源,物理网卡,天线
GPS硬件:
C1板,1个蘑菇头天线,电源
A1板,2个蘑菇头天线,电源
2根公对公串口线:用来连接DTU和GPS版
1根输出串口线:用来连接GPS信息输出串口和开发板
基站安装
C1板
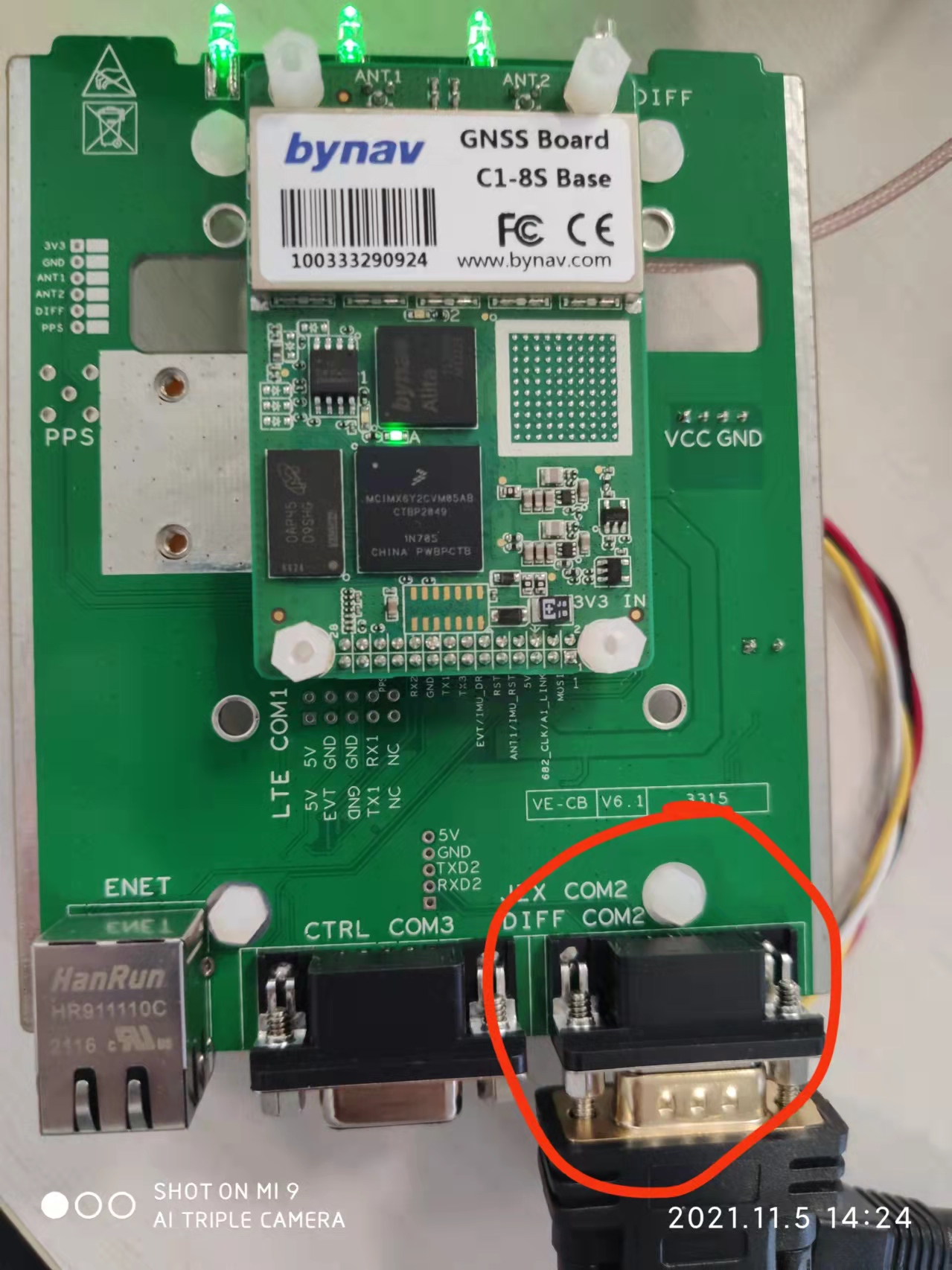
注意:COM2是差分输出,也就COM2接DTU,把差分信号发出去
基站设置
上位机软件下载:https://www.bynav.com/feedback/download?aid=688
🟣 第一步,我们打开上位机软件,点击【Conn】-->【Set】,打开端口
🟣 第二步,验证一下是否正常通信
在Input框输入 Log Version
下方有反馈,说明可以正常通信
🟣 第二步,我们设置基准站,输入 RTKTYPE BASE
下方显示OK,说明配置成功
🟣 第三步,保存配置,输入SAVECONFIG,保存成功
🟣 第四步,恢复出厂配置,输入 FRESET,输出窗口中正在恢复
恢复成功,已经开始正常运行
🟣 第五步,获取基站坐标,输入 fix auto ,下方显示OK,获取成功
🟣 第六步,查看基准站输出的差分数据
默认【ASCII】格式的输出是乱码,选择【HEX】显示,开头显示D300,说明差分数据正常输出
流动站安装
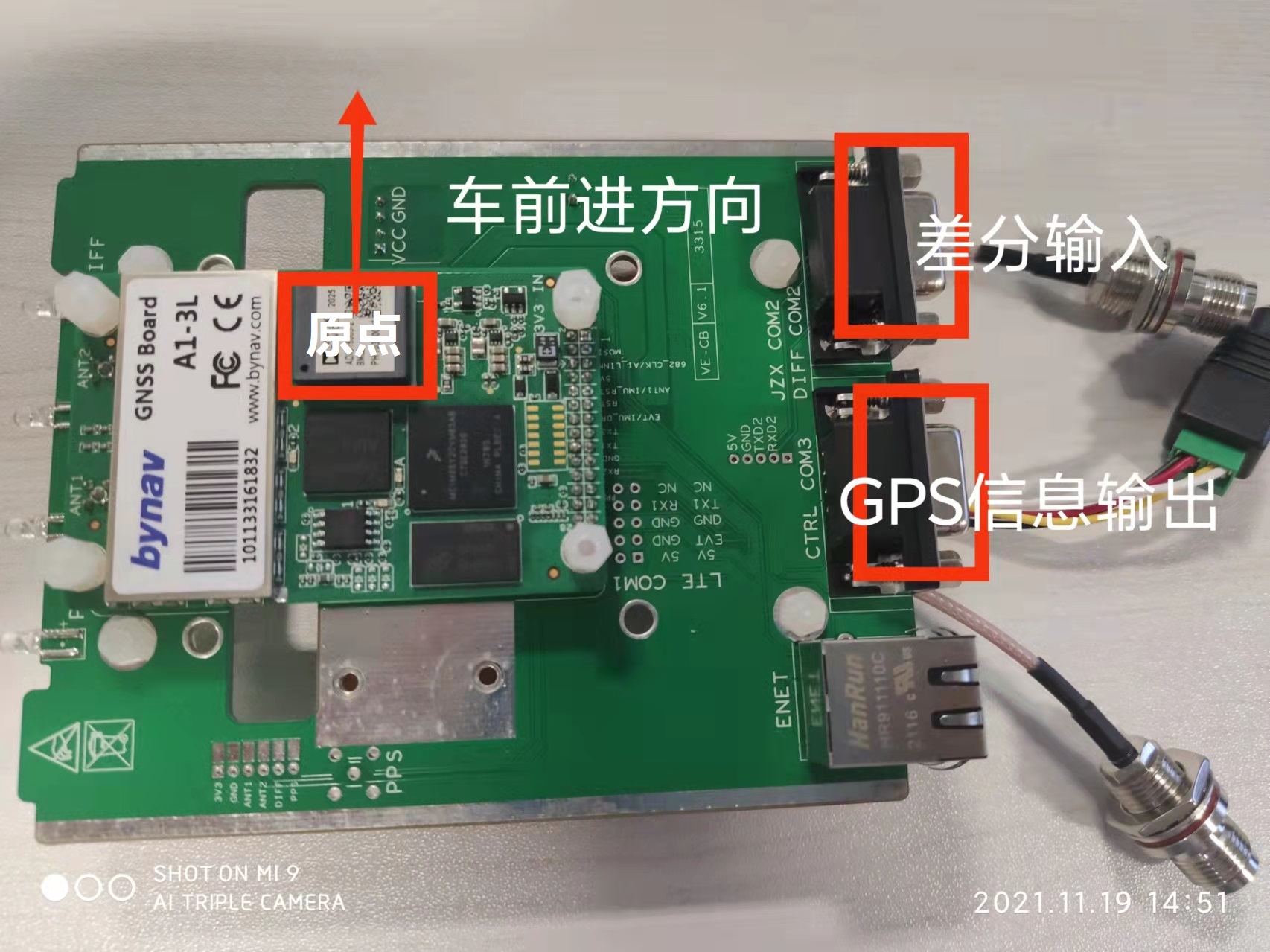
注意
- 定位坐标系的原点:A1板上的惯性测量单元 (IMU)
- 安装时板子方向:箭头标识方向是车辆前进方向
- COM2:差分输入口
- COM3:GPS信息输出

流动站设置
🟣 第一步,我们先点击Set打开端口进行连接
🟣 第二步,我们来验证一下是否正常通信
在Input框输入 Log Version
下方有反馈,说明可以正常通信
🟣 第三步,设置流动站,输入 RTKTYPE ROVER
下方显示OK,设置成功
🟣 第四步,保存配置,输入SAVECONFIG,保存成功
🟣 第五步,恢复出厂配置,输入 FRESET,输出窗口中正在恢复
恢复成功,已经开始正常运行
语句显示已经变成固定解
基准站成功通过DTU输出差分给流动站
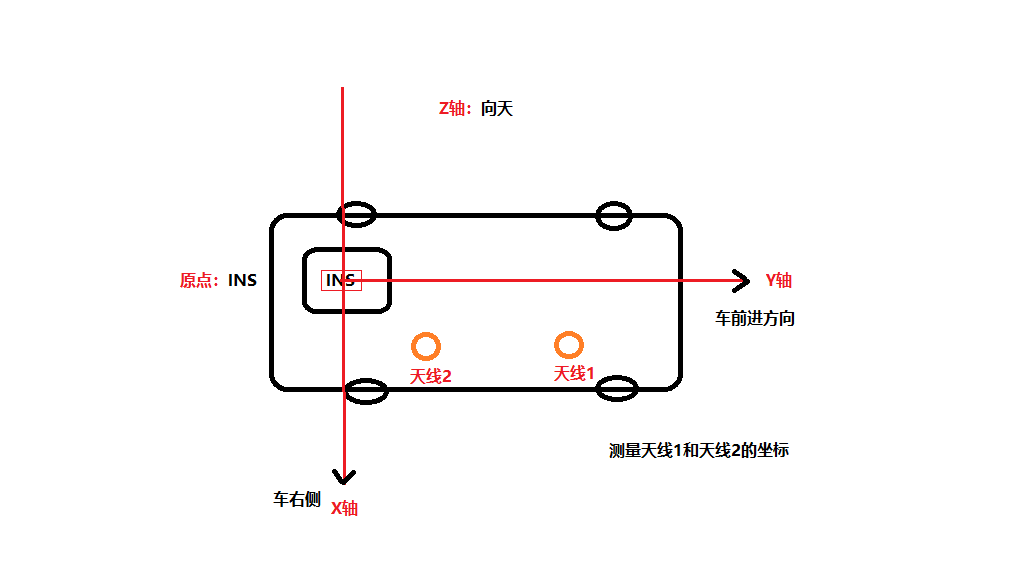
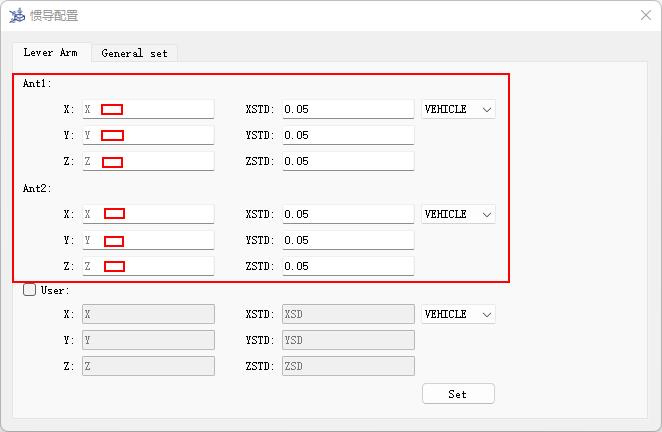
杆臂设置
原点:A1板卡的惯性导航中心(MEMS陀螺仪芯片)
坐标系:车前进方向为 Y 轴,右侧是 X 轴,上方是 Z 轴
INS设置:天线1,天线2的坐标,标准差为0.05
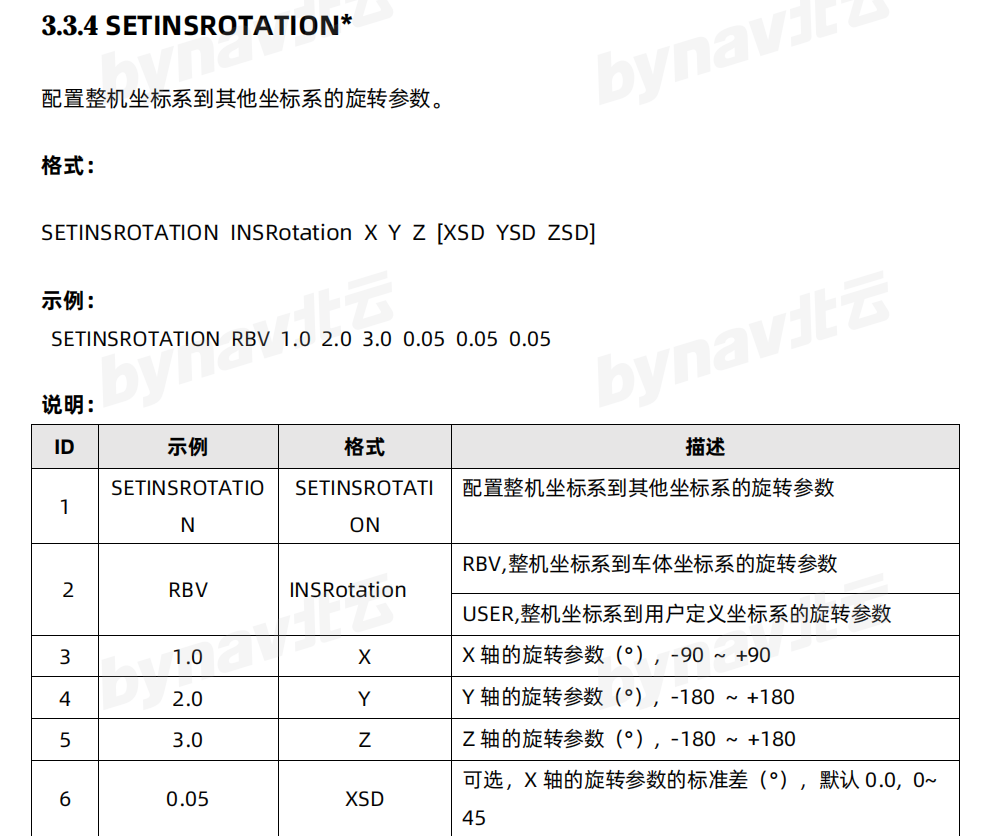
RBV校准
板卡方向:水平固定,建议图中箭头标注方向在前,这样就不用设置旋转角度
如果不是这一个在前,那就要设置旋转角度,设置命令(比如向右转了90度)
SETINSROTATION RBV 0 0 90
SAVECONFIG
直线行驶后开始校准,看校准情况,然后保存重启
注意:校准之前确保定位定向均处于固定解状态
https://www.bilibili.com/video/BV1JZ4y1F7Ya
🟣 第一步,在输入框中输入 log version
🟣 第二步,输入 inscralibrate rbv new ,开始校准
🟣 第三步,输入 log inscalstatus onchanged ,配置输出rbv校准信息及频率
🟣 第四步,让车子达到 18km/h 以上的车道上直行
当为 calibrated 时,校准完成
🟣 第五步,输入 saveconfig ,保存配置
🟣 第六步,输入 reboot ,进行重启

消息命令
最后决定使用:INSPVASA
包含GPS+INS的信息,信息简短
推荐的:INSPVAXA
INSPVASA基础上,包含标准差等不太需要的数据。

遇到的问题和疑问
使用RTK算法能达到的误差精度?
宣称是厘米级,一般是分米级别。(也就是误差是0.06m,0.17m的)
RTK要求基站和流动站距离20KM内,感觉是越近越好。
使用物联网卡的流量来传输GPS信号,会不会很费流量?
实际使用发现是用流量很少,2个月,基本上班时间上电,基站和流动站各用了约300M。
虽说定位要求200毫秒发一次位置信息,但是每次发送的数据量很小(基站发,流动站收,二进制数据)。
使用软件把时间和位置作图显示,隔天情况有误差?
因为使用时会重新上电,不用了就断电。
基站是不能动的,位置应该是固定的。
如果基站设置每次自动获取位置是会造成误差的,因为每次自动获取的位置肯定不一样,第一次自动获取后,要设置为固定经纬度。
能不能够获取到北斗信号?
肯定是可以的。
定位需要的是星座,星座一般要几十颗卫星组成。
一般因为GPS、伽利略、格洛纳斯、北斗等定位系统,也可以称为星座,提供的民用数据都是公开的。
按照格式解析数据就能获取到位置信息。
定位一般需要视野中星座中的4颗卫星,多了的卫星数据要舍弃(好像是)。
至于输出哪个系统的位置信息,按理说哪个都可以,当然也可以比较一下,选择一个所谓较好的输出。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号