
mmHRV: Contactless Heart Rate Variability Monitoring using Millimeter-Wave Radio 使用毫米波进行心率变异性检测
mmHRV:基于毫米波的非接触式心率变异性检测
摘要:
心率变异性(HRV),定义为连续心跳之间的周期变化,即心跳间隔(IBI),是个人整体健康状况的重要指标。为了减轻用户负担,探索长期健康检测的可用性,HRV的非接触检测方法引起了很大的关注。
mmHRV系统包括两个关键部分:目标检测器和心跳信号提取器。
目标检测器用来识别用户的位置;
心跳信号提取器用来对胸部运动调制的信道信息相位进行优化分解,从而估计心跳。
通过找到心跳信号的的峰值位置估计心跳的准确时间。
介绍:
HRV分析已被证明是评估心脏健康和评估自主神经系统状态的有力工具。在许多应用中,如心血管疾病的早期诊断、压力评估、情绪识别和焦虑治疗等,需要高精度的HRV监测。
HRV的传统测量是使用心电图(心电图)或光电容积描记图(PPG)传感器连续测量IBIs获得的,这两种传感器都是专用的医疗设备,必须与人体皮肤物理接触。
然而,使用心电图或PPG对用户来说是不舒服的,有时可能会导致皮肤过敏。为了避免直接接触使用者的皮肤,其他可穿戴设备,如惯性测量单元(IMUs),已经被探索用来测量胸部表面的运动,以确定IBIs,然后测量HRV 。
为此,基于射频(RF)的感测已经成为最有前途的候选之一,因为人类对象的存在将影响射频信号传播
从技术上讲,准确的HRV估计比心率估计困难得多。现有的心率估计系统通常在时域中采集多个样本,以实现更高的心率估计精度,这相当于对特定时间窗口内的心跳进行平均。
然而,它们不适用于HRV估计,后者需要每个心跳的确切时间,并带来以下挑战:
1)人体胸部反射的射频信号受到呼吸和心跳的调制,其中呼吸引起的距离变化比心跳引起的距离变化大一个数量级。在信号处理术语中,信噪比(SINR)非常低,无法从复合信号中恢复和分离心跳波。
2)心跳首先通过骨骼和组织到达胸壁,然后被射频信号检测到。因此,人体的骨骼和组织起到了过滤器的作用,从而抑制了信号。
为了提供用于HRV估计的鲁棒系统,有必要确定目标的数量和位置进而估计每个受试者的HRV。
为了应对上述挑战,作者提出了mmHRV,这是第一个使用商用毫米波无线电的多人HRV估计系统。首先,设计一个目标检测器来识别用户的数量和他们的位置,而无需任何预先校准。注意:由于毫米波射频信号[23]的快速衰减,信号强度随着其穿越更长的距离而降低。
为了检测不同距离的人体目标,使用二维恒虚警检测器(CFAR)在距离-方位平面来估计噪声水平,从而为目标检测提供自适应阈值。再使用相位信息进一步用于过滤掉静态对象(例如,墙壁、家具)。
注意,对于单个人类主体,通常有多个反射点。所以,为了确定目标的数量,进一步使用非参数聚类来识别对应于每个人类主体的距离-方位平面。
在目标检测之后,为了估计HRV,需要从复合接收信号中提取心跳波,该复合接收信号的相位包括整个胸部运动,包括呼吸和心跳运动。请注意,呼吸运动范围为4-12毫米,频率为每分钟6-30次,而心跳运动范围为0.2-0.5毫米,频率为每分钟50-120次,两者都是准周期信号。
利用这一特性,作者开发了一个心跳提取器,它将复合信号优化分解为几个带限信号(频带有限的信号)分量。在分解的信号分量中,幅度和频率满足典型心跳信号要求的就是心跳波。与大多数连续分解复合信号的工作相比,mmHRV可以通过同时分解信号分量来避免错误传播问题。然后识别估计的心跳波峰值,以识别每个心跳的确切时间。
因此,IBIs(心脏跳动间隔)可进一步推导并用于计算常用的HRV度量标准,如连续差值的均方根(RMSSD)、所有IBIs的标准偏差(SDRR)和相差超过50毫秒的连续IBIs百分比(pNN50)。
系统概览:
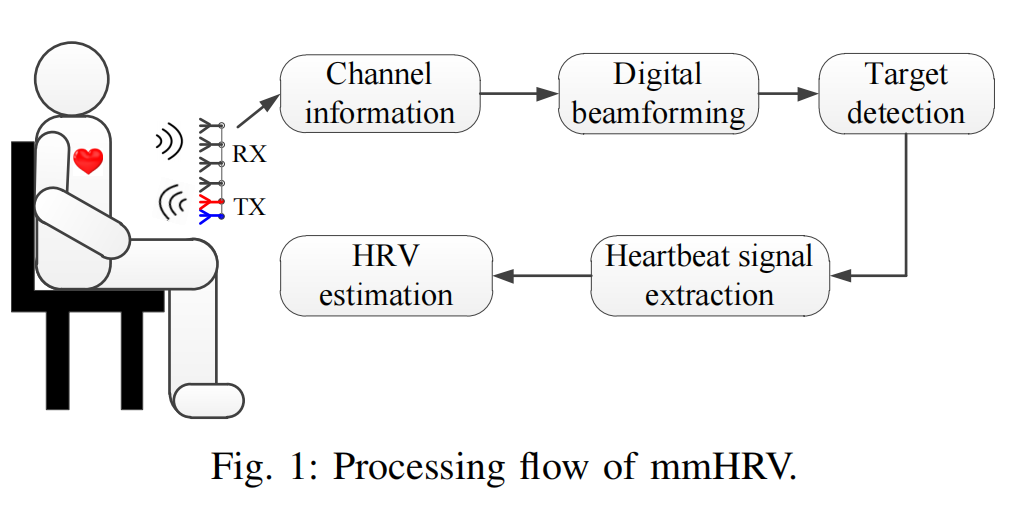
系统的处理流程如图1所示。
首先调频连续波发射FMCW信号,捕捉人体和静态物体的反射。为了检测不同位置的人体目标,采用巴特利特波束形成器获取不同方位-距离平面的信道信息。然后,作者设计了一个目标检测器,用于自适应的估计不同距离和方位角的噪声等,从而检测反射物体的存在。
为了从由呼吸和心跳调制的相位信息中提取心跳信号,使用心跳信号提取器,将相位信号分解为几个窄带信号,并估计心跳波。
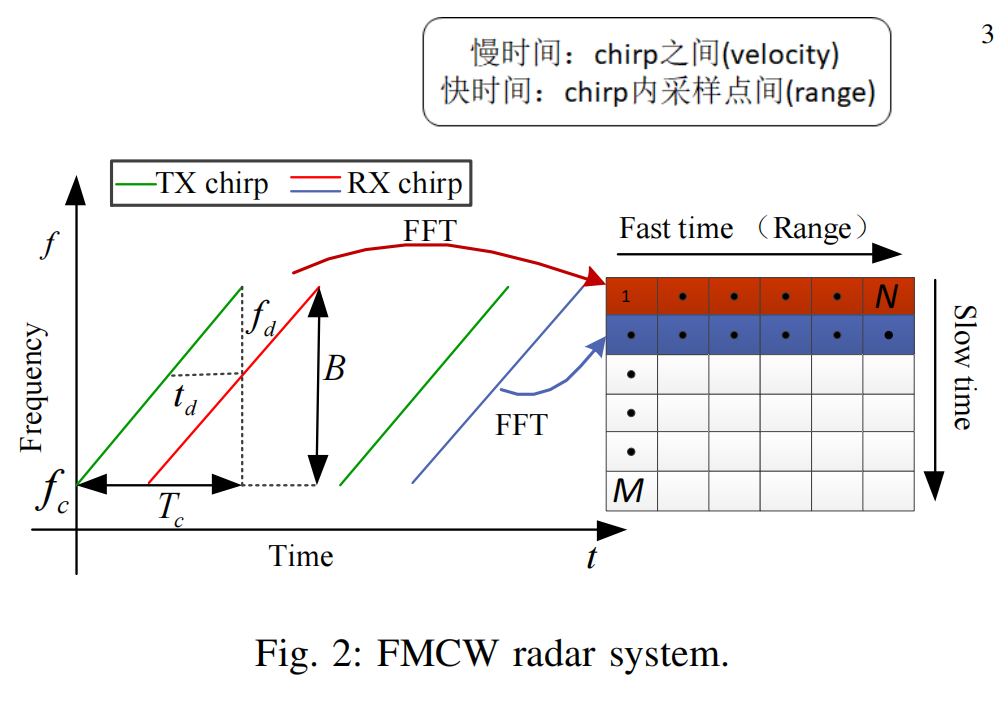
信号模型:
FMCW-chirp信号
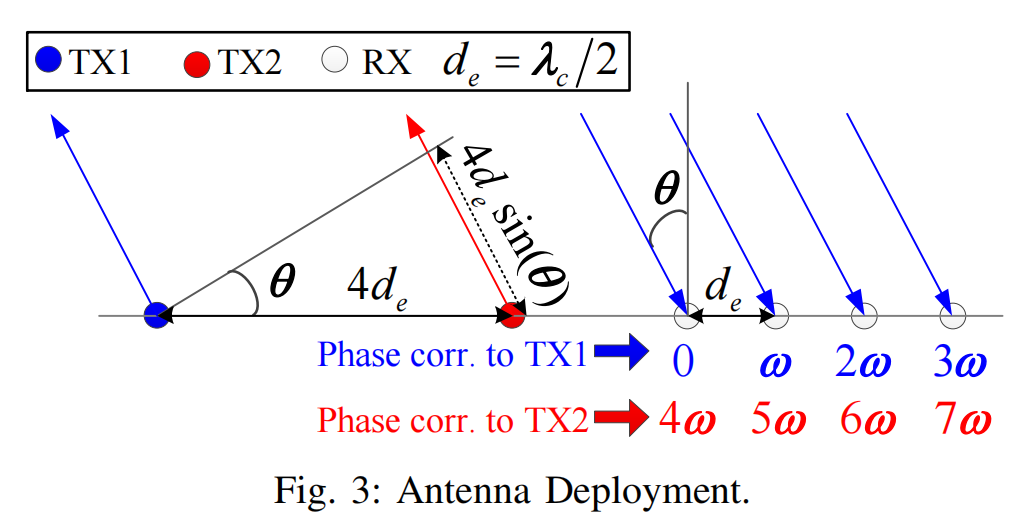
天线设置:
基于TMD时分复用,由2根发射天线4根接收天线组成具有8个接收单元的MIMO虚拟天线阵列。
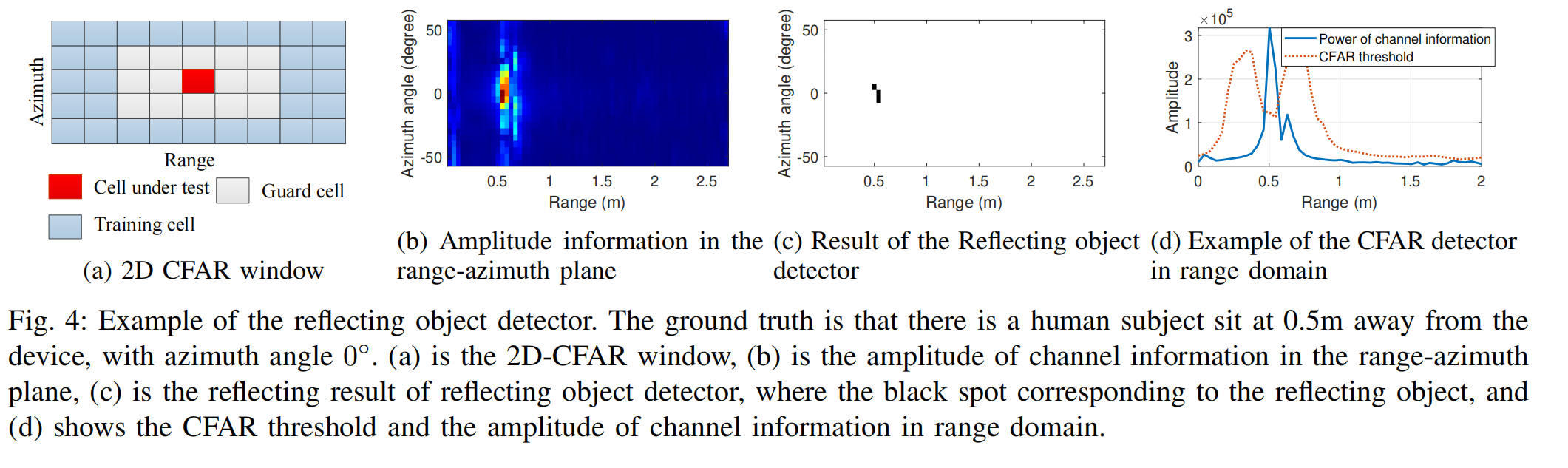
人体目标检测/二维恒虚警
CFAR算法可以自适应的设定阈值,过滤得到干净的人体反射信号。
图b为人体检测的距离-方位热图,图c为使用恒虚警算法处理后得到的距离-方位图。图d展示的虚线是恒虚警算法的阈值,实线是距离域的距离幅值图。图中峰值处为人体位置的反射信号。(CFAR的作用可以理解为,即使在存在多种运动物体反射的情况下,也可以捕捉到人体的反射)
静态反射消除
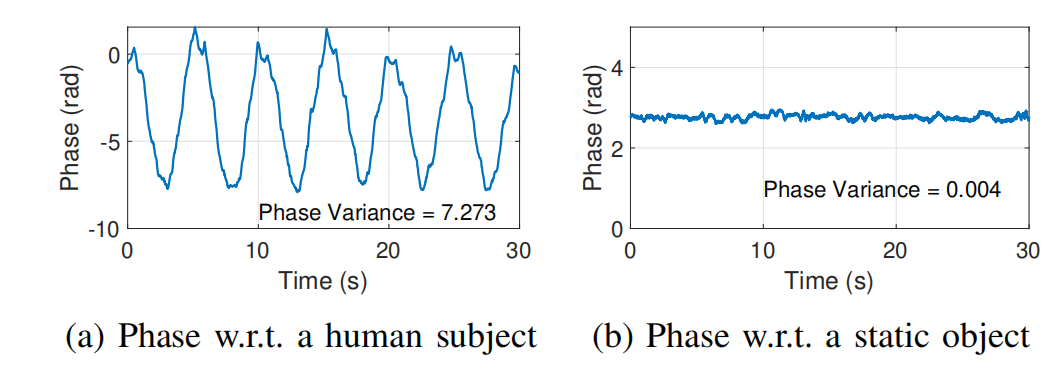
通过相位的变化去除静态物体的影响。人体具有呼吸、心跳、身体晃动等动作,会导致相位的变化。
a图为与人体有关的相位信息,b图为静态物体相关的相位信息。
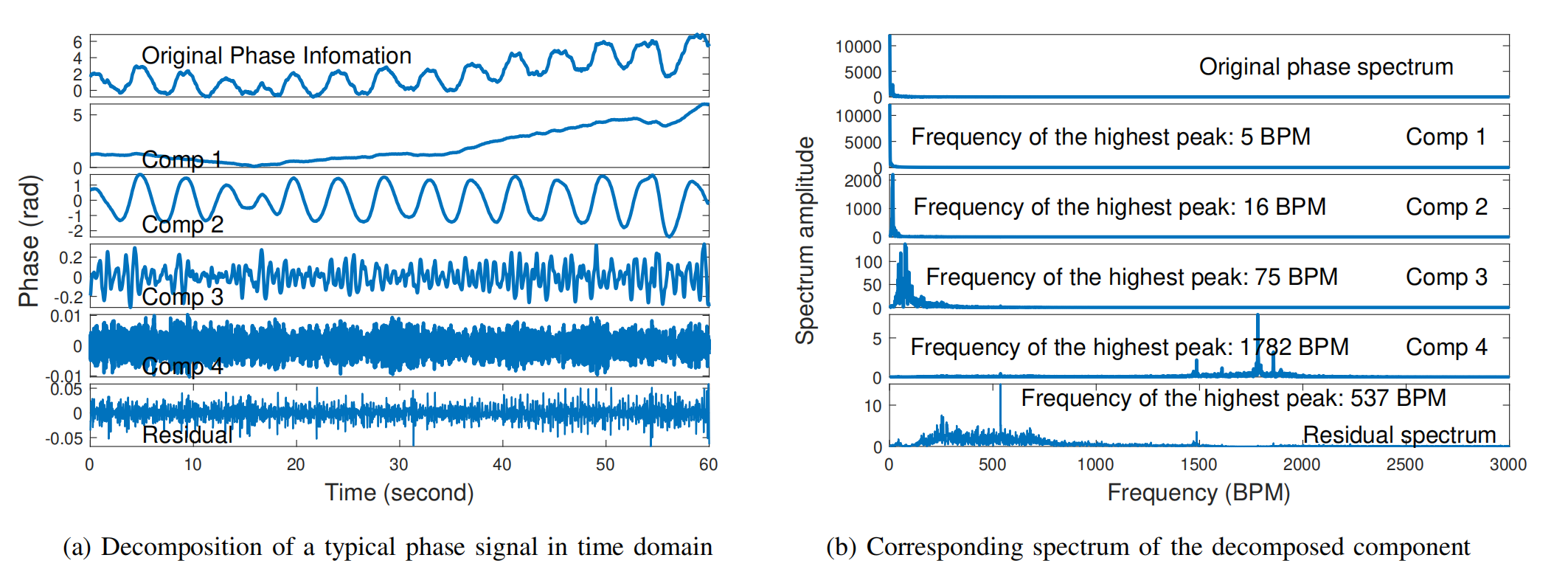
**心跳提取*。
得到人体相关的相位信息后,使用EMD分解等方法,将原始相位信号分解为多个信号分量。再对每个信号分量使用一维傅里叶变换,转换为频域。符合心跳频率范围内的信号分量即为心跳波。
HRV估计
一旦提取了心跳波,就可以通过心跳波的峰值来识别对应于每个心跳的确切时间。为了进一步提高准确度,在提取峰值之前进行归一化。具体来说就是通过取心跳分量绝对值的移动平均值估计心跳波的包络。如下图所示:
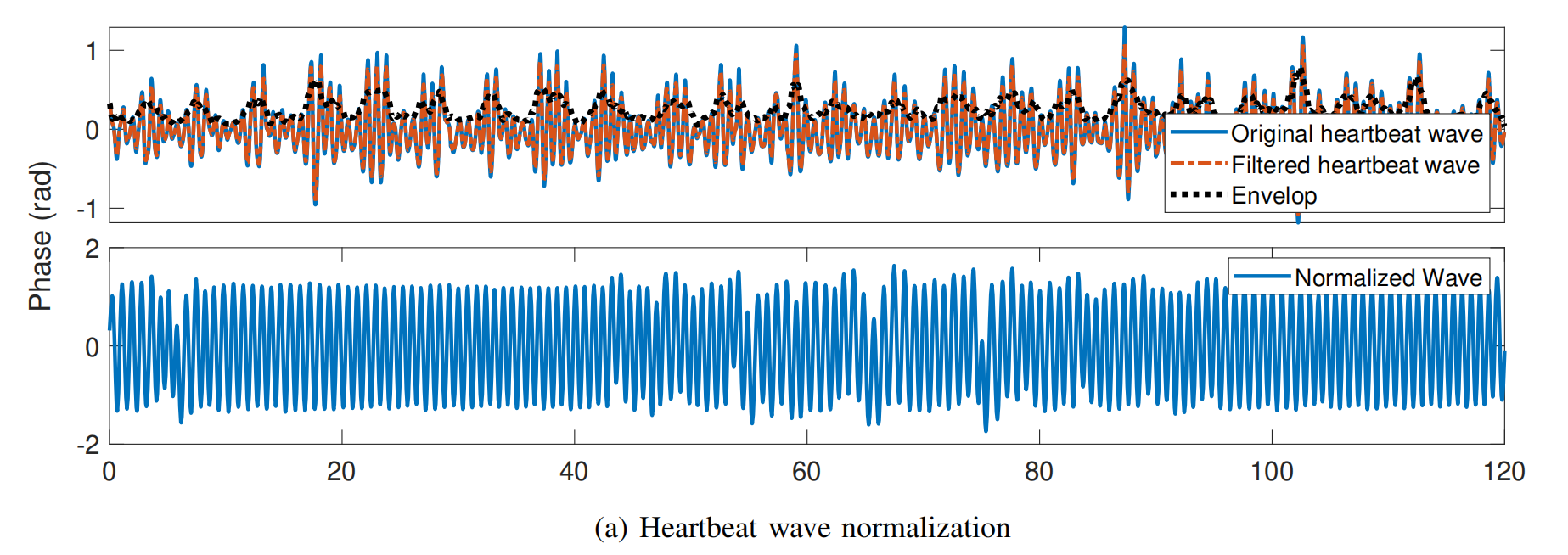
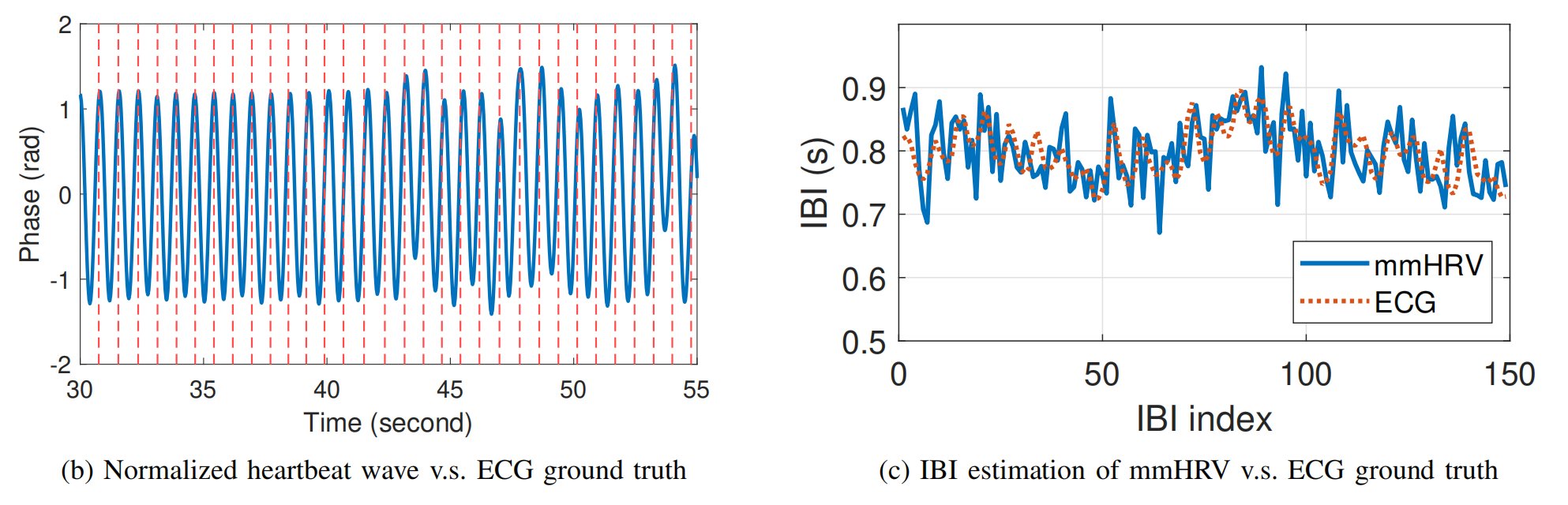
进一步对原始心跳波进行移动平均滤波以降低噪声。归一化后的波是滤波后的心跳波和估计包络之间的比率。因此,可以通过计算两个相邻心跳之间的持续时间来导出IBIs。下图显示了心跳波和真实心电图,其中虚线展示了来自商用心电图传感器的每个心跳的准确时间。
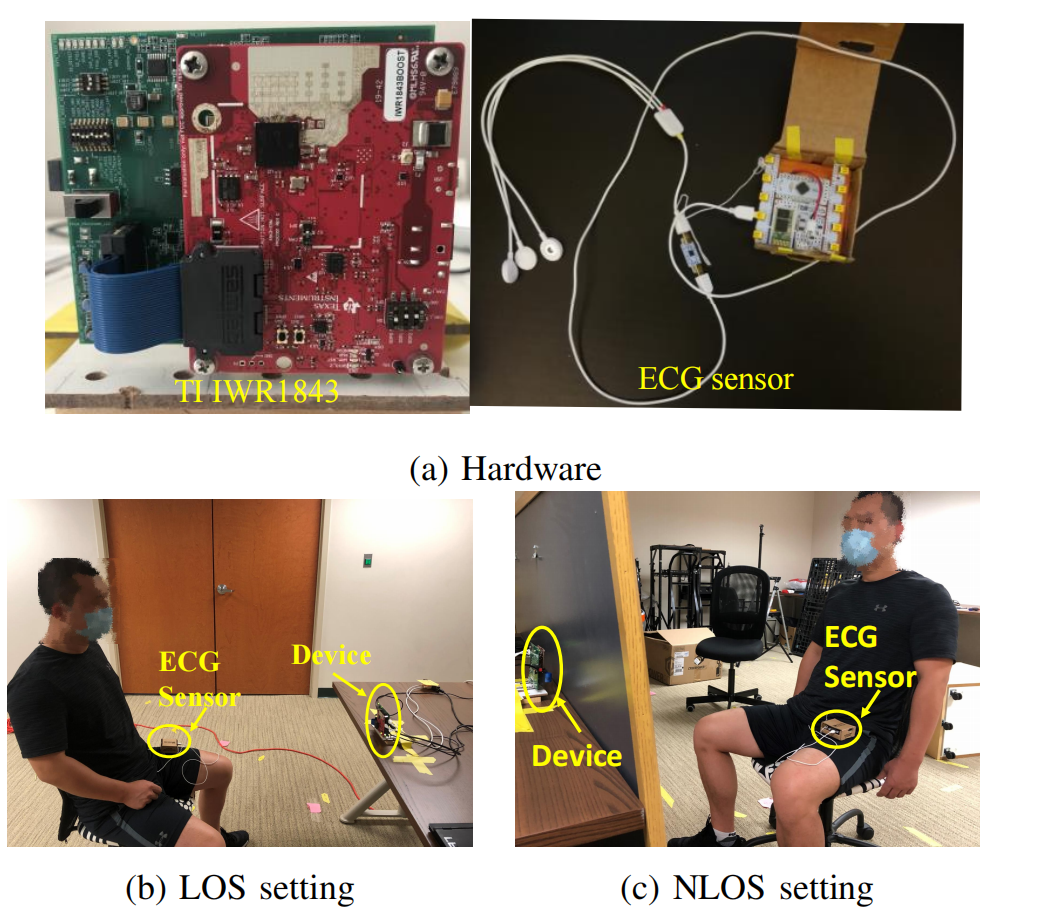
实验设置
使用设备:TI IWR1843毫米波雷达
groundtruth通过ECG传感器采集,实验场景见下图。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号