超详细的FreeRTOS移植全教程——基于srm32
准备
在移植之前,我们首先要获取到FreeRTOS的官方的源码包。这里我们提供两个下载链接:
一个是官网:http://www.freertos.org/
另外一个是代码托管网站:https://sourceforge.net/projects/freertos/files/FreeRTOS/
这里我们演示如何在代码托管网站里面下载。打开网站链接之后,我们选择FreeRTOS的最新版本V9.0.0(2016年),尽管现在FreeRTOS的版本已经更新到V10.0.1了,但是我们还是选择V9.0.0,因为内核很稳定,并且网上资料很多,因为V10.0.0版本之后是亚马逊收购了FreeRTOS之后才出来的版本,主要添加了一些云端组件,我们本书所讲的FreeRTOS是实时内核,采用V9.0.0版本足以。
简单介绍FreeRTOS
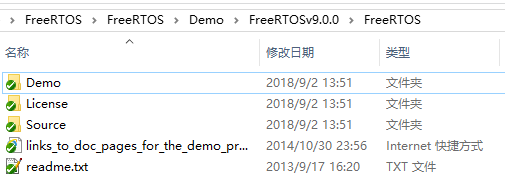
FreeRTOS包含Demo例程和内核源码(比较重要,我们就需要提取该目录下的大部分文件)。
Source文件夹里面包含的是FreeRTOS内核的源代码,我们移植FreeRTOS的时候就需要这部分源代码;
Demo 文件夹里面包含了FreeRTOS官方为各个单片机移植好的工程代码,FreeRTOS为了推广自己,会给各种半导体厂商的评估板写好完整的工程程序,这些程序就放在Demo这个目录下,这部分Demo非常有参考价值。
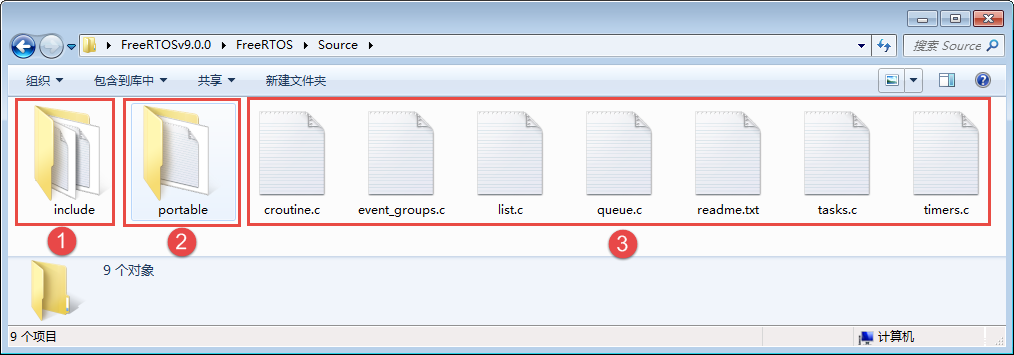
Source文件夹
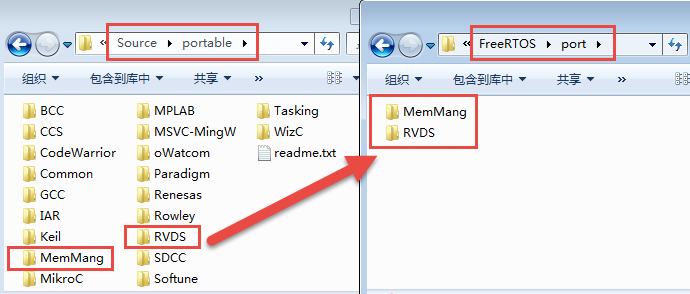
这里我们再重点分析下FreeRTOS/ Source文件夹下的文件,①和③包含的是FreeRTOS的通用的头文件和C文件,这两部分的文件试用于各种编译器和处理器,是通用的。需要移植的头文件和C文件放在②portblle这个文件夹。
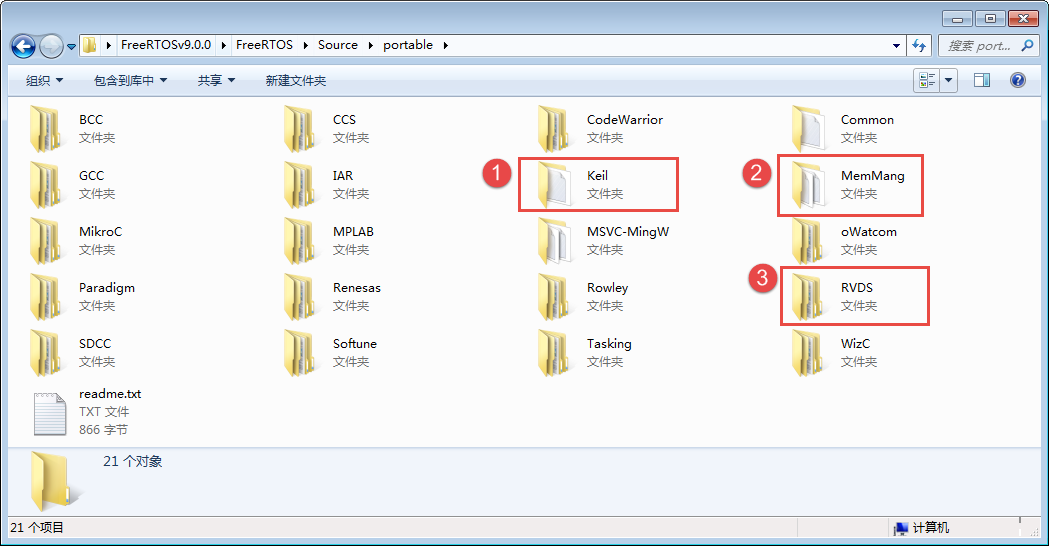
portblle文件夹,是与编译器相关的文件夹,在不同的编译器中使用不同的支持文件。①中的KEIL就是我们就是我们使用的编译器,其实KEIL里面的内容跟RVDS里面的内容一样,所以我们只需要③RVDS文件夹里面的内容即可,里面包含了各种处理器相关的文件夹,从文件夹的名字我们就非常熟悉了,我们学习的STM32有M0、M3、M4等各种系列,FreeRTOS是一个软件,单片机是一个硬件,FreeRTOS要想运行在一个单片机上面,它们就必须关联在一起。MemMang文件夹下存放的是跟内存管理相关的源文件。
移植过程
提取源码
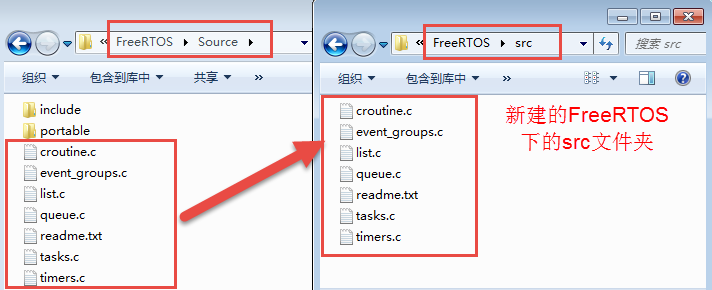
- 首先在我们的STM32裸机工程模板根目录下新建一个文件夹,命名为“FreeRTOS”,并且在FreeRTOS文件夹下新建两个空文件夹,分别命名为“src”与“port”,src文件夹用于保存FreeRTOS中的核心源文件,也就是我们常说的‘.c文件’,port文件夹用于保存内存管理以及处理器架构相关代码,这些代码FreeRTOS官方已经提供给我们的,直接使用即可,在前面已经说了,FreeRTOS是软件,我们的开发版是硬件,软硬件必须有桥梁来连接,这些与处理器架构相关的代码,可以称之为RTOS硬件接口层,它们位于FreeRTOS/Source/Portable文件夹下。
- 打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\FreeRTOS\Source”目录下找到所有的‘.c文件’,将它们拷贝到我们新建的src文件夹中,
- 打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\FreeRTOS\Source\portable”目录下找到“MemMang”文件夹与“RVDS”文件夹,将它们拷贝到我们新建的port文件夹中
- 打开FreeRTOS V9.0.0源码,在“FreeRTOSv9.0.0\ FreeRTOS\Source”目录下找到“include”文件夹,它是我们需要用到FreeRTOS的一些头文件,将它直接拷贝到我们新建的FreeRTOS文件夹中,完成这一步之后就可以看到我们新建的FreeRTOS文件夹已经有3个文件夹,这3个文件夹就包含FreeRTOS的核心文件,至此,FreeRTOS的源码就提取完成。

添加到工程
添加FreeRTOSConfig.h文件
FreeRTOSConfig.h文件是FreeRTOS的工程配置文件,因为FreeRTOS是可以裁剪的实时操作内核,应用于不同的处理器平台,用户可以通过修改这个FreeRTOS内核的配置头文件来裁剪FreeRTOS的功能,所以我们把它拷贝一份放在user这个文件夹下面。
打开FreeRTOSv9.0.0源码,在“FreeRTOSv9.0.0\FreeRTOS\Demo”文件夹下面找到“CORTEX_STM32F103_Keil”这个文件夹,双击打开,在其根目录下找到这个“FreeRTOSConfig.h”文件,然后拷贝到我们工程的user文件夹下即可,等下我们需要对这个文件进行修改。
创建工程分组
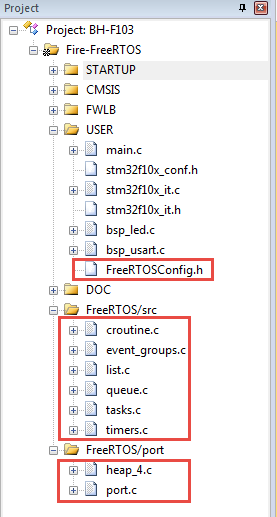
接下来我们在mdk里面新建FreeRTOS/src和FreeRTOS/port两个组文件夹,其中FreeRTOS/src用于存放src文件夹的内容,FreeRTOS/port用于存放port\MemMang文件夹 与port\RVDS\ARM_CM3文件夹的内容。
然后我们将工程文件中FreeRTOS的内容添加到工程中去,按照已经新建的分组添加我们的FreeRTOS工程源码。
在FreeRTOS/port分组中添加MemMang文件夹中的文件只需选择其中一个即可,我们选择“heap_4.c”,这是FreeRTOS的一个内存管理源码文件。
添加完成后:
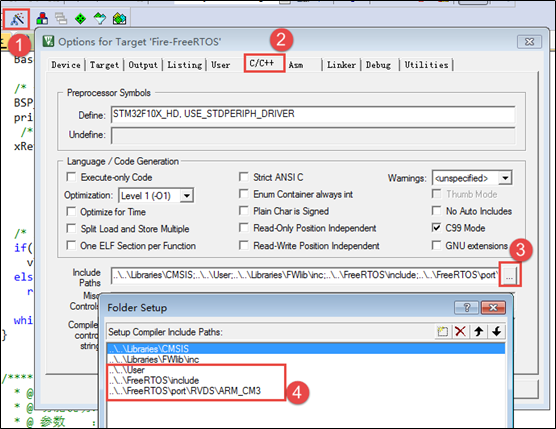
** 添加头文件路径**
FreeRTOS的源码已经添加到开发环境的组文件夹下面,编译的时候需要为这些源文件指定头文件的路径,不然编译会报错。FreeRTOS的源码里面只有FreeRTOS\include和FreeRTOS\port\RVDS\ARM_CM3这两个文件夹下面有头文件,只需要将这两个头文件的路径在开发环境里面指定即可。同时我们还将FreeRTOSConfig.h这个头文件拷贝到了工程根目录下的user文件夹下,所以user的路径也要加到开发环境里面。
修改FreeRTOSConfig.h
FreeRTOSConfig.h是直接从demo文件夹下面拷贝过来的,该头文件对裁剪整个FreeRTOS所需的功能的宏均做了定义,有些宏定义被使能,有些宏定义被失能,一开始我们只需要配置最简单的功能即可。要想随心所欲的配置FreeRTOS的功能,我们必须对这些宏定义的功能有所掌握,下面我们先简单的介绍下这些宏定义的含义,然后再对这些宏定义进行修改。
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include "stm32f10x.h"
#include "bsp_usart.h"
//针对不同的编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include <stdint.h>
extern uint32_t SystemCoreClock;
#endif
//断言
#define vAssertCalled(char,int) printf("Error:%s,%d\r\n",char,int)
#define configASSERT(x) if((x)==0) vAssertCalled(__FILE__,__LINE__)
/************************************************************************
* FreeRTOS基础配置配置选项
*********************************************************************/
/* 置1:RTOS使用抢占式调度器;置0:RTOS使用协作式调度器(时间片)
*
* 注:在多任务管理机制上,操作系统可以分为抢占式和协作式两种。
* 协作式操作系统是任务主动释放CPU后,切换到下一个任务。
* 任务切换的时机完全取决于正在运行的任务。
*/
#define configUSE_PREEMPTION 1
//1使能时间片调度(默认式使能的)
#define configUSE_TIME_SLICING 1
/* 某些运行FreeRTOS的硬件有两种方法选择下一个要执行的任务:
* 通用方法和特定于硬件的方法(以下简称“特殊方法”)。
*
* 通用方法:
* 1.configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0 或者硬件不支持这种特殊方法。
* 2.可以用于所有FreeRTOS支持的硬件
* 3.完全用C实现,效率略低于特殊方法。
* 4.不强制要求限制最大可用优先级数目
* 特殊方法:
* 1.必须将configUSE_PORT_OPTIMISED_TASK_SELECTION设置为1。
* 2.依赖一个或多个特定架构的汇编指令(一般是类似计算前导零[CLZ]指令)。
* 3.比通用方法更高效
* 4.一般强制限定最大可用优先级数目为32
* 一般是硬件计算前导零指令,如果所使用的,MCU没有这些硬件指令的话此宏应该设置为0!
*/
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1
/* 置1:使能低功耗tickless模式;置0:保持系统节拍(tick)中断一直运行
* 假设开启低功耗的话可能会导致下载出现问题,因为程序在睡眠中,可用以下办法解决
*
* 下载方法:
* 1.将开发版正常连接好
* 2.按住复位按键,点击下载瞬间松开复位按键
*
* 1.通过跳线帽将 BOOT 0 接高电平(3.3V)
* 2.重新上电,下载
*
* 1.使用FlyMcu擦除一下芯片,然后进行下载
* STMISP -> 清除芯片(z)
*/
#define configUSE_TICKLESS_IDLE 0
/*
* 写入实际的CPU内核时钟频率,也就是CPU指令执行频率,通常称为Fclk
* Fclk为供给CPU内核的时钟信号,我们所说的cpu主频为 XX MHz,
* 就是指的这个时钟信号,相应的,1/Fclk即为cpu时钟周期;
*/
#define configCPU_CLOCK_HZ (SystemCoreClock)
//RTOS系统节拍中断的频率。即一秒中断的次数,每次中断RTOS都会进行任务调度
#define configTICK_RATE_HZ (( TickType_t )1000)
//可使用的最大优先级
#define configMAX_PRIORITIES (32)
//空闲任务使用的堆栈大小
#define configMINIMAL_STACK_SIZE ((unsigned short)128)
//任务名字字符串长度
#define configMAX_TASK_NAME_LEN (16)
//系统节拍计数器变量数据类型,1表示为16位无符号整形,0表示为32位无符号整形
#define configUSE_16_BIT_TICKS 0
//空闲任务放弃CPU使用权给其他同优先级的用户任务
#define configIDLE_SHOULD_YIELD 1
//启用队列
#define configUSE_QUEUE_SETS 1
//开启任务通知功能,默认开启
#define configUSE_TASK_NOTIFICATIONS 1
//使用互斥信号量
#define configUSE_MUTEXES 1
//使用递归互斥信号量
#define configUSE_RECURSIVE_MUTEXES 1
//为1时使用计数信号量
#define configUSE_COUNTING_SEMAPHORES 1
/* 设置可以注册的信号量和消息队列个数 */
#define configQUEUE_REGISTRY_SIZE 10
#define configUSE_APPLICATION_TASK_TAG 0
/*****************************************************************
FreeRTOS与内存申请有关配置选项
*****************************************************************/
//支持动态内存申请
#define configSUPPORT_DYNAMIC_ALLOCATION 1
//支持静态内存
#define configSUPPORT_STATIC_ALLOCATION 0
//系统所有总的堆大小
#define configTOTAL_HEAP_SIZE ((size_t)(36*1024))
/***************************************************************
FreeRTOS与钩子函数有关的配置选项
**************************************************************/
/* 置1:使用空闲钩子(Idle Hook类似于回调函数);置0:忽略空闲钩子
*
* 空闲任务钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationIdleHook(void ),
* 这个函数在每个空闲任务周期都会被调用
* 对于已经删除的RTOS任务,空闲任务可以释放分配给它们的堆栈内存。
* 因此必须保证空闲任务可以被CPU执行
* 使用空闲钩子函数设置CPU进入省电模式是很常见的
* 不可以调用会引起空闲任务阻塞的API函数
*/
#define configUSE_IDLE_HOOK 0
/* 置1:使用时间片钩子(Tick Hook);置0:忽略时间片钩子
*
*
* 时间片钩子是一个函数,这个函数由用户来实现,
* FreeRTOS规定了函数的名字和参数:void vApplicationTickHook(void )
* 时间片中断可以周期性的调用
* 函数必须非常短小,不能大量使用堆栈,
* 不能调用以”FromISR" 或 "FROM_ISR”结尾的API函数
*/
/*xTaskIncrementTick函数是在xPortSysTickHandler中断函数中被调用的。因此,vApplicationTickHook()函数执行的时间必须很短才行*/
#define configUSE_TICK_HOOK 0
//使用内存申请失败钩子函数
#define configUSE_MALLOC_FAILED_HOOK 0
/*
* 大于0时启用堆栈溢出检测功能,如果使用此功能
* 用户必须提供一个栈溢出钩子函数,如果使用的话
* 此值可以为1或者2,因为有两种栈溢出检测方法 */
#define configCHECK_FOR_STACK_OVERFLOW 0
/********************************************************************
FreeRTOS与运行时间和任务状态收集有关的配置选项
**********************************************************************/
//启用运行时间统计功能
#define configGENERATE_RUN_TIME_STATS 0
//启用可视化跟踪调试
#define configUSE_TRACE_FACILITY 0
/* 与宏configUSE_TRACE_FACILITY同时为1时会编译下面3个函数
* prvWriteNameToBuffer()
* vTaskList(),
* vTaskGetRunTimeStats()
*/
#define configUSE_STATS_FORMATTING_FUNCTIONS 1
/********************************************************************
FreeRTOS与协程有关的配置选项
*********************************************************************/
//启用协程,启用协程以后必须添加文件croutine.c
#define configUSE_CO_ROUTINES 0
//协程的有效优先级数目
#define configMAX_CO_ROUTINE_PRIORITIES ( 2 )
/***********************************************************************
FreeRTOS与软件定时器有关的配置选项
**********************************************************************/
//启用软件定时器
#define configUSE_TIMERS 1
//软件定时器优先级
#define configTIMER_TASK_PRIORITY (configMAX_PRIORITIES-1)
//软件定时器队列长度
#define configTIMER_QUEUE_LENGTH 10
//软件定时器任务堆栈大小
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE*2)
/************************************************************
FreeRTOS可选函数配置选项
************************************************************/
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskCleanUpResources 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 1
//#define INCLUDE_xTaskGetCurrentTaskHandle 1
//#define INCLUDE_uxTaskGetStackHighWaterMark 0
//#define INCLUDE_xTaskGetIdleTaskHandle 0
/******************************************************************
FreeRTOS与中断有关的配置选项
******************************************************************/
#ifdef __NVIC_PRIO_BITS
#define configPRIO_BITS __NVIC_PRIO_BITS
#else
#define configPRIO_BITS 4
#endif
//中断最低优先级
#define configLIBRARY_LOWEST_INTERRUPT_PRIORITY 15
//系统可管理的最高中断优先级
#define configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY 5
#define configKERNEL_INTERRUPT_PRIORITY ( configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) ) /* 240 */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY ( configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS) )
/****************************************************************
FreeRTOS与中断服务函数有关的配置选项
****************************************************************/
#define xPortPendSVHandler PendSV_Handler
#define vPortSVCHandler SVC_Handler
/* 以下为使用Percepio Tracealyzer需要的东西,不需要时将 configUSE_TRACE_FACILITY 定义为 0 */
#if ( configUSE_TRACE_FACILITY == 1 )
#include "trcRecorder.h"
#define INCLUDE_xTaskGetCurrentTaskHandle 1 // 启用一个可选函数(该函数被 Trace源码使用,默认该值为0 表示不用)
#endif
#endif /* FREERTOS_CONFIG_H */
修改stm32f10x_it.c
SysTick中断服务函数是一个非常重要的函数,FreeRTOS所有跟时间相关的事情都在里面处理,SysTick就是FreeRTOS的一个心跳时钟,驱动着FreeRTOS的运行,就像人的心跳一样,假如没有心跳,我们就相当于“死了”,同样的,FreeRTOS没有了心跳,那么它就会卡死在某个地方,不能进行任务调度,不能运行任何的东西,因此我们需要实现一个FreeRTOS的心跳时钟,FreeRTOS帮我们实现了SysTick的启动的配置:在port.c文件中已经实现vPortSetupTimerInterrupt()函数,并且FreeRTOS通用的SysTick中断服务函数也实现了:在port.c文件中已经实现xPortSysTickHandler()函数,所以移植的时候只需要我们在stm32f10x_it.c文件中实现我们对应(STM32)平台上的SysTick_Handler()函数即可。FreeRTOS为开发者考虑得特别多,PendSV_Handler()与SVC_Handler()这两个很重要的函数都帮我们实现了,在在port.c文件中已经实现xPortPendSVHandler()与vPortSVCHandler()函数,防止我们自己实现不了,那么在stm32f10x_it.c中就需要我们注释掉PendSV_Handler()与SVC_Handler()这两个函数了。
//void SVC_Handler(void)
//{
//}
//void PendSV_Handler(void)
//{
//}
extern void xPortSysTickHandler(void);
//systick中断服务函数
void SysTick_Handler(void)
{
#if (INCLUDE_xTaskGetSchedulerState == 1 )
if (xTaskGetSchedulerState() != taskSCHEDULER_NOT_STARTED)
{
#endif /* INCLUDE_xTaskGetSchedulerState */
xPortSysTickHandler();
#if (INCLUDE_xTaskGetSchedulerState == 1 )
}
#endif /* INCLUDE_xTaskGetSchedulerState */
}
创建任务
这里,我们创建一个单任务,任务使用的栈和任务控制块是在创建任务的时候FreeRTOS动态分配的。
任务必须是一个死循环,否则任务将通过LR返回,如果LR指向了非法的内存就会产生HardFault_Handler,而FreeRTOS指向一个死循环,那么任务返回之后就在死循环中执行,这样子的任务是不安全的,所以避免这种情况,任务一般都是死循环并且无返回值的。
并且每个任务循环主体中应该有阻塞任务的函数,否则就会饿死比它优先级更低的任务!!!
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
static void AppTaskCreate(void);/* AppTask任务 */
/* 创建任务句柄 */
static TaskHandle_t AppTask_Handle = NULL;
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTask, /* 任务入口函数 */
(const char* )"AppTask",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTask_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
static void AppTask(void* parameter)
{
while (1)
{
LED1_ON;
vTaskDelay(500); /* 延时500个tick */
LED1_OFF;
vTaskDelay(500); /* 延时500个tick */
}
}
关注我

更多资料欢迎关注“物联网IoT开发”公众号!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号