
【caffe】基本数据结构blob
blob是caffe中的基本数据结构,简单理解就是一个“4维数组”。但是,这个4维数组有什么意义?
BTW,TensorFlow这款google出的框架,带出了tensor(张量)的概念。虽然是数学概念,个人还是倾向于简单理解为“多维数组”,那么放在这里,
caffe的blob就相当于一个特殊的tensor了。而矩阵就是二维的张量。anyway,看看blob的4个维度都代表什么:
num: 图像数量
channel:通道数量
width:图像宽度
height:图像高度
caffe中默认使用的SGD随机梯度下降,其实是mini-batch SGD
每个batch,就是一堆图片。这一个batch的图片,就存储在一个blob中。
当然,blob并不是这么受限的、专门给batch内的图片做存储用的。实际上,参数、梯度,也可以用blob存储的。只要是caffe的网络中传递的数据,都可以用blob存储。
而且,blob实际上也并不一定是4维的。它在实现上其实就是1维的指针,而我们作为用户感受到的“多个维度”是通过shape来操作的。
========= 2016-10-26 20:32:45更新 ==========
在用faster-rcnn训练的时候使用了ZF网络,对于ZF网络中的卷积、池化的计算,这里想自己算一算,结果发现对于卷积网的计算细节还是不太懂,于是找到这篇博客。
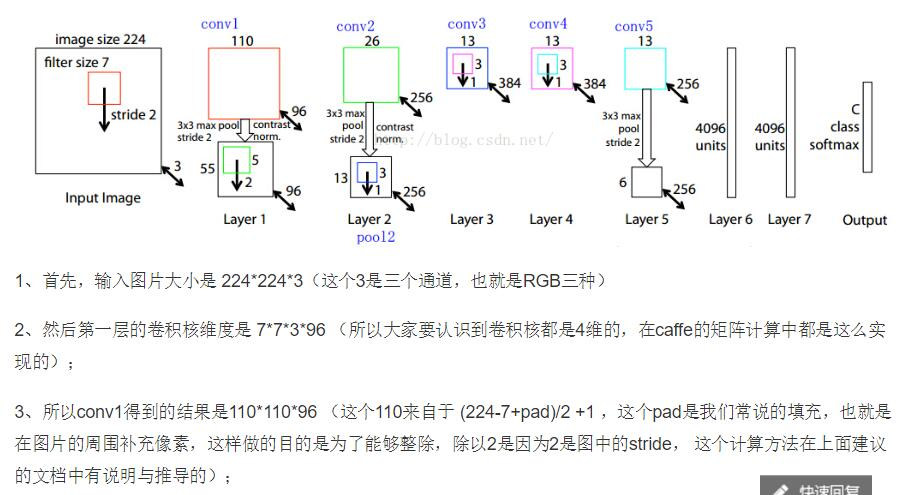
第一感觉是,conv1得到的应该是110x110x3x96的结果,而不是110x110x96。后来问了别人,再看看书,发现自己忽略了一个细节,
就是卷积之后有一个∑和sigmoid的两个过程,前者是累加,后者是映射到0-1之间。具体到faster-rcnn,∑对应的就是:各个通道上对应位置做累加;
而激活函数使用的应该是ReLU吧。anyway,这里的累加和激活函数处理后,通道数就变成了一个;也就是,对于一个滤波器,滑窗滤波+累加、
激活函数后,得到的一个feature map。再具体点说,这里的滤波器(卷积核),是3维的,(Width,Height,Channel)这样;我们用它在一个feature map
上按滑窗方式做卷积,其实是所有Channel上同时做sliding window的操作;每个sliding windows位置上,所有通道卷积的结果累加起来,再送给激活
函数ReLU处理,就得到结果feature map中的一个像素的值。值得注意的是,滤波器的通道数量,和要处理的feature map的通道数量,其实可以不一
样的,可以比feature map维度少一点,这相当于可以自行指定要选取feature map中的某些channel做卷积操作,相当于有一个采样的过程,甚至可以
仅仅使用一个channel的卷积结果。具体例子,可以参考《人工智能(第三版)》(王万良著)里面的例子,结合例子中算出的“要学习的参数数量”来理解。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号