5.感知机科普简介
- 本文由中山大学In+ Lab整理完成,转载注明出处!
- 团队介绍 传送门(http://www.cnblogs.com/inpluslab-dataplayer/p/8541380.html)
线性分类器起源
在实际应用中,我们往往遇到这样的问题:给定一些数据点,它们分别属于两个不同的类,现在要找到一个线性分类器把这些数据分成两类。
怎么分呢?把整个空间劈成两半呗(让我想到了盘古)。用二维空间举个例子,如上图所示,我们用一条直线把空间切割开来,直线左边的点属于类别-1(用三角表示),直线右边的点属于类别1(用方块表示)。
如果用数学语言呢,就是这样的:空间是由X1和X2组成的二维空间,直线的方程是X1+X2 = 1,用向量符号表示即为 \([1,1]^{T}[X1,X2]-1=0\) 。点x在直线左边的意思是指,当把x放入方程左边,计算结果小于0。同理,在右边就是把x放入方程左边,计算出的结果大于0。都是高中数学知识。
在二维空间中,用一条直线就把空间分割开了:
在三维空间中呢,需要用一个平面把空间切成两半,对应的方程是X1+X2+X3=1,也就是 \([1,1,1]^{T}[X1,X2,X3]-1=0\) 。
在高维(n>3)空间呢?就需要用到n-1维的超平面将空间切割开了。那么抽象的归纳下:如果用x表示数据点,用y表示类别(y取1或者-1,代表两个不同的类),一个线性分类器的学习目标便是要在n维的数据空间中找到一个超平面(hyper plane),把空间切割开,这个超平面的方程可以表示为(\(W^{T}\)中的T代表转置):
拓展到高维空间中(n>3), 图像形式的可以不用想象,类推其代数表述形式即可。小结如下:
对于超平面S:
对于点X(X是一个向量,表示多维空间内一点),
若 $ W^{T} X+b>0 $ , 则点X在超平面S上面部分;
若 $ W^{T} X+b<0 $ , 则点X在超平面S下面部分;
感知机的学习策略
现在,我们在二维数据的情况下,一步步模拟感知机的大致的学习策略。
假设有若干点,分为两种类别,如图2所示,圈点和叉点分别表示两种不同的类别。为了确定一个合适的直线s使之能够将这两类点正确的区分出来,先随机选一条直线 $ S_0 $ 如下图2的形式:
我们看到,随机挑选的直线 $ S_{0} $ 并不能把所有的点都正确区分开来。由于在初始直线以上部分,叉点多于圈点,故令叉点为正类,圈点为负类。那么,图中标红的圈点和叉点就称为误分类点。那么将这些误分类点正确分类后,就能得到一条直线S能将所有的点正确分类。
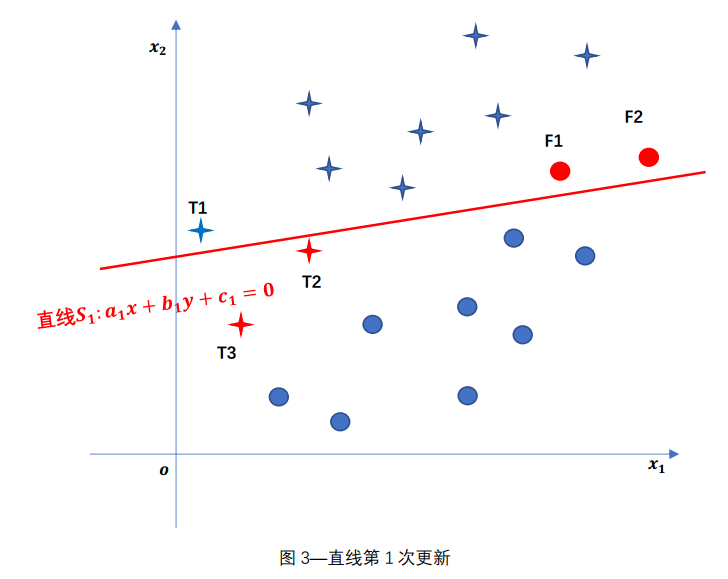
接下来,开始模拟,直线 $ S_{0}:ax+by+c=0 $ 的变化过程。
先根据T1点,去调整参数a,b,c,更新直线S,如下图,得到更新后的直线$ S_{1} $ 。
然后根据T2点,去调整参数a,b,c,更新直线S,如下图,得到更新后的直线 $ S_{2} $ 。
根据图中的误分类点,依次更新参数a,b,c,得到最终更新的直线S .
如图6所示,根据图中所有的误分类点,通过不断调整参数更新直线S,使得S能逐步将越来越多的点正确分类直至将所有的点都正确区分。最终得到的直线S就是感知机模型中所用到的形式。
于是最终的感知机模型:
小拓展
上述是在二维空间里的感知机模型,推广到n维空间中:
直线具体的变化过程
上面举得栗子,只是讲述了感知机模型中的直线的变化流程,那么直线具体是怎么调整的呢,也就是说,关于直线的那些参数是怎么样一步步调整更新的呢?
为了便于感知机模型推广至高维空间,使用感知机模型的一般式进行演示。感知机模型:
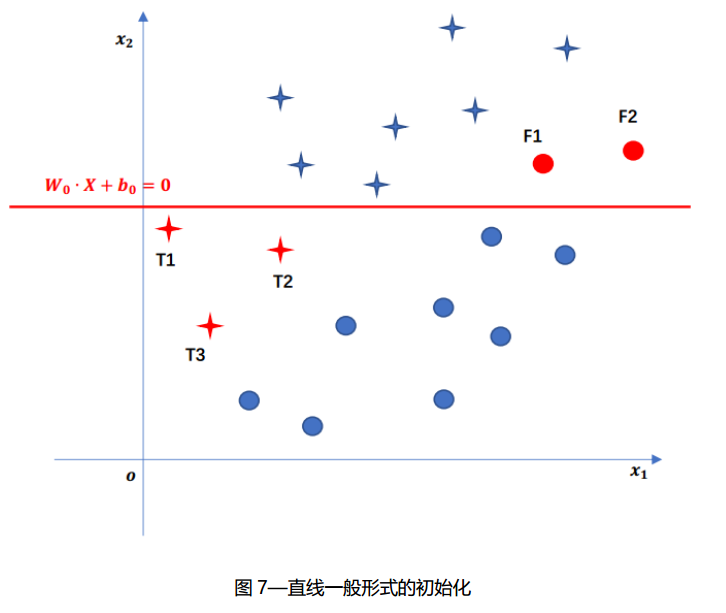
先还是随机挑选(随机初始化)一条直线 $ S_{0}: W_{0}∙X+b_{0}=0 $ , 在图中会发现一些误分类点(红色的圈点和叉点)。除了通过查看图像得出误分类点外,还可以通过点与直线的关系,确定一个代数表达式来计算验证某一点是否为误分类点。将点的坐标代入初始化直线所表示的感知机模型:$ f(X)=sign(W_{0}∙X+b_{0}) $ ,即可得到感知机模型根据输入X预测的类别f(X),然后比较f(X)与数据点(X,y)中实际类别y是否相同即可。即 $ y∙sign(W_{0}∙X+b_{0})≤0 $
的点X就为误分类点。解决这些误分类点就成了感知机模型学习的关键。
图7中,在误分类点集合中,随机挑选一个点,假设挑选了点T1,坐标为 $ X_{T1} $ ,类别为 $ y_{T1} $ ,为了使感知机模型正确区分T1,需要对参数进行调整,更新。
图7中,T1的类别 $ y_{T1}=+1 $ , 而感知机模型的预测类别为 $ f(X_{T1} )=sign(W_{0}∙X_{T1}+b_{0} )=-1 $ ,说明,是式子 $ W_{0}∙X_{T1}+b_{0} $ 的值过小,所以,需要增大 $ W_{0} $ 和 $ b_{0} $ 的值。调整方式为:
η为人为设置的参数(也称为学习率,表示参数更新的精度);
同理,当 $ y_{T1}=-1 $时,调整方式为:
小结上述过程,调整方式为:
当根据一个误分类点调整完毕后,需要扫描整个数据集,重新验证一个误分类点集。然后,依次类推,逐步调整直线,直至数据集完全被正确划分。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号