会员
周边
新闻
博问
闪存
众包
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
initial_h
https://github.com/initial-h
博客园
首页
新随笔
管理
上一页
1
2
3
4
5
6
7
···
12
下一页
2023年5月27日
POLICY IMPROVEMENT BY PLANNING WITH GUMBEL
摘要: 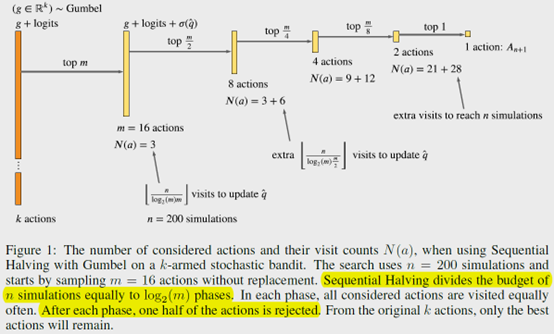 **发表时间:**2022(ICLR 2022) **文章要点:**AlphaZero在搜索次数很少的时候甚至动
阅读全文
posted @ 2023-05-27 21:11 initial_h
阅读(248)
评论(0)
推荐(0)
2023年5月24日
The Difficulty of Passive Learning in Deep Reinforcement Learning
摘要: 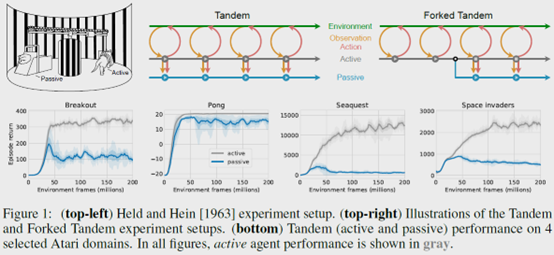 **发表时间:**2021(NeurIPS 2021) **文章要点:**这篇文章提出一个tandem learni
阅读全文
posted @ 2023-05-24 22:58 initial_h
阅读(47)
评论(0)
推荐(0)
2023年5月21日
Off-Policy Deep Reinforcement Learning without Exploration
摘要: **发表时间:**2019(ICML 2019) **文章要点:**这篇文章想说在offline RL的setting下,由于外推误差(extrapolation errors)的原因,标准的off-policy算法比如DQN,DDPG之类的,如果数据的分布和当前policy的分布差距很大的话,那就
阅读全文
posted @ 2023-05-21 12:10 initial_h
阅读(229)
评论(0)
推荐(0)
2023年5月18日
A Deeper Look at Experience Replay
摘要: **发表时间:**2017(Deep Reinforcement Learning Symposium, NIPS 2017) **文章要点:**这篇文章主要研究了replay buffer大小对Q-learning的影响,得出的结论是大的buffer会损害performance,因为采样的样本会更
阅读全文
posted @ 2023-05-18 11:53 initial_h
阅读(134)
评论(0)
推荐(0)
2023年5月13日
DisCor: Corrective Feedback in Reinforcement Learning via Distribution Correction
摘要: **发表时间:**2020 (NeurIPS 2020) **文章要点:**这篇文章想说,对于监督学习来说就算刚开始训的不准,后面的新数据也会给你正确的feedback,这样的话随着训练进行,总会修正之前的错误。但是对于像Q-learning这样的强化学习任务来说,不存在这样的feedback,因为
阅读全文
posted @ 2023-05-13 22:44 initial_h
阅读(113)
评论(0)
推荐(0)
2023年5月9日
DYNAMICS-AWARE UNSUPERVISED DISCOVERY OF SKILLS
摘要: **发表时间:**2020(ICLR2020) **文章要点:**这篇文章提出了一个无监督的model-based的学习算法Dynamics-Aware Discovery of Skills (DADS),可以同时发现可预测的行为以及学习他们的dynamics。然后对于新任务,可以直接用zero-
阅读全文
posted @ 2023-05-09 22:41 initial_h
阅读(97)
评论(0)
推荐(0)
2023年5月6日
Heuristic-Guided Reinforcement Learning
摘要: **发表时间:**2021 (NeurIPS 2021) **文章要点:**这篇文章提出了一个Heuristic-Guided Reinforcement Learning (HuRL)的框架,用domain knowledge或者offline data构建heuristic,将问题变成一个sho
阅读全文
posted @ 2023-05-06 23:30 initial_h
阅读(169)
评论(0)
推荐(1)
2023年5月2日
Teachable Reinforcement Learning via Advice Distillation
摘要: **发表时间:**2021 (NeurIPS 2021) **文章要点:**这篇文章提出了一种学习policy的监督范式,大概思路就是先结构化advice,然后先学习解释advice,再从advice中学policy。这个advice来自于外部的teacher,相当于一种human-in-the-l
阅读全文
posted @ 2023-05-02 23:41 initial_h
阅读(59)
评论(0)
推荐(1)
2023年4月30日
Deep Dynamics Models for Learning Dexterous Manipulation
摘要: **发表时间:**2019 (CoRL 2019) **文章要点:**文章提出了一个online planning with deep dynamics models (PDDM)的算法来学习Dexterous multi-fingered hands,大概意思就是学习拟人的灵活的手指操控技巧。大概
阅读全文
posted @ 2023-04-30 13:34 initial_h
阅读(113)
评论(0)
推荐(0)
2023年4月27日
EXPLORING MODEL-BASED PLANNING WITH POLICY NETWORKS
摘要: **发表时间:**2020(ICLR 2020) **文章要点:**这篇文章说现在的planning方法都是在动作空间里randomly generated,这样很不高效(其实瞎扯了,很多不是随机的方法啊)。作者提出在model based RL里用policy网络来做online planning
阅读全文
posted @ 2023-04-27 23:02 initial_h
阅读(84)
评论(0)
推荐(0)
2023年4月23日
Learning Off-Policy with Online Planning
摘要: **发表时间:**2021(CoRL 2021) **文章要点:**这篇文章提出Off-Policy with Online Planning (LOOP)算法,将H-step lookahead with a learned model和terminal value function learne
阅读全文
posted @ 2023-04-23 12:56 initial_h
阅读(54)
评论(0)
推荐(0)
2023年4月20日
The Second Type of Uncertainty in Monte Carlo Tree Search
摘要: **发表时间:**2020 **文章要点:**MCTS里通常通过计算访问次数来做探索,这个被称作count-derived uncertainty。这篇文章提出了第二种uncertainty,这种uncertainty来源于子树的大小,一个直觉的想法就是,如果一个动作对应下的子树小,那就不用探索那么
阅读全文
posted @ 2023-04-20 23:14 initial_h
阅读(71)
评论(0)
推荐(0)
2023年4月16日
Value targets in off-policy AlphaZero: a new greedy backup
摘要: **发表时间:**2021 **文章要点:**这篇文章给AlphaZero设计了一个新的value targets,AlphaZero with greedy backups (A0GB)。 AlphaZero的树里面有探索,而value又是所有结果的平均,所以并不准确。而选动作也是依概率选的,但真
阅读全文
posted @ 2023-04-16 10:23 initial_h
阅读(43)
评论(0)
推荐(1)
2023年4月12日
Visualizing MuZero Models
摘要: **发表时间:**2021 **文章要点:**这篇文章主要想看看muzero里面的model具体学到了什么表征。通过PCA降维的方式,发现最开始编码状态的h函数学到的embedding和动态转移函数g学到的embedding并不统一,存在很大差异。因为muzero里面没有相关的loss来控制他俩一样
阅读全文
posted @ 2023-04-12 22:29 initial_h
阅读(73)
评论(0)
推荐(0)
2023年4月10日
Demonstration-Conditioned Reinforcement Learning for Few-Shot Imitation
摘要: **发表时间:**2021(ICML 2021) **文章要点:**这篇文章提出了demonstration-conditioned reinforcement learning (DCRL)来做Few-Shot Imitation,将demonstration和当前状态作为输入,通过强化学习最大化
阅读全文
posted @ 2023-04-10 07:35 initial_h
阅读(80)
评论(0)
推荐(0)
上一页
1
2
3
4
5
6
7
···
12
下一页
公告

 浙公网安备 33010602011771号
浙公网安备 33010602011771号