工业机器人的形态(非姿态)
工业机器人的形态
当我们描述机器人在空间的一个位姿时,通常使用直角坐标系、工具坐标系或用户坐标系(统称为笛卡尔坐标系)的点。但是同样的一个位姿对于关节坐标系来说可能有多个值。

假定当六轴机器人处于零点位置时,各坐标系的值如下表。
| 关节坐标系 | 直角坐标系 |
|---|---|
| 各轴均为 0 | X:500 Y:0 Z:1000 A:0 B:0 C:3.14 |
但是当我们将机器人的 4、5、6 轴各旋转 180°,会发现机器人的位姿没有变化,但是对于关节坐标系来说 4、5、6 轴的值变为了 180°。
这说明笛卡尔坐标系的值不能完全决定机器人的姿势,所以除此外还需要指定其它确定机器人姿势的数据。这个我们称为姿态。
并且机器人的种类不同,形态也不同。
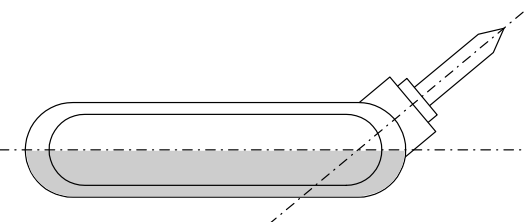
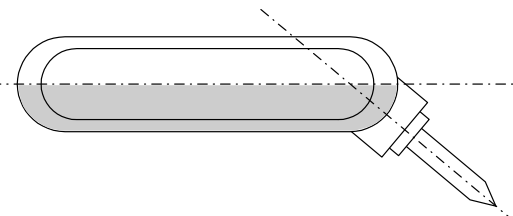
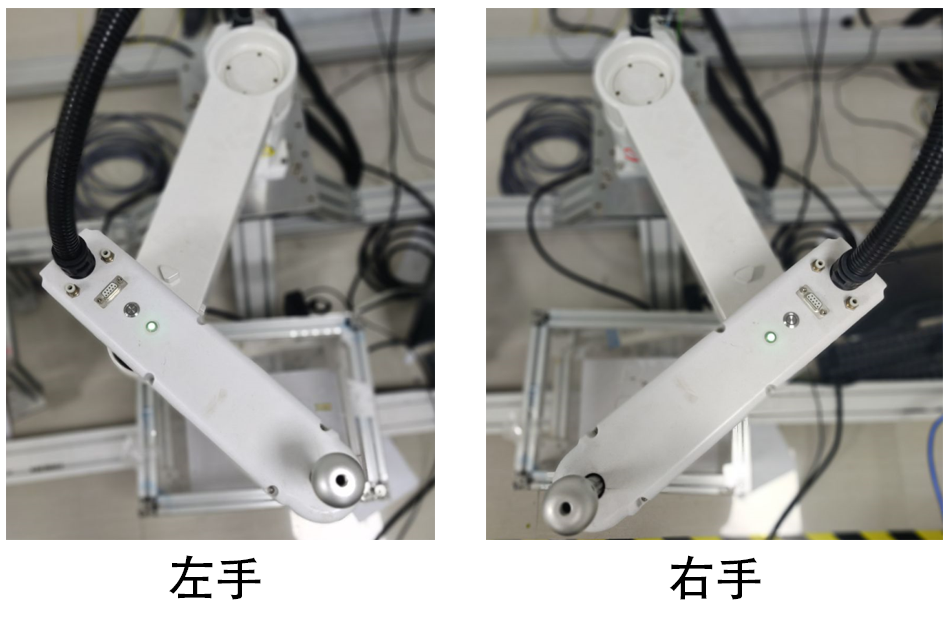
例如对于 SCARA 机器人来说,我们将其区分为左手和右手。
六轴机器人的形态
5 轴
我们观察 5 轴的角度,当其角度小于-90°,称为仰。
当其角度大于-90 度,称为俯。
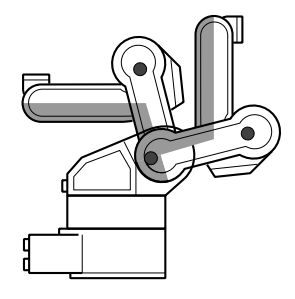
3 轴
当 3 轴处于-90~+90° 这个区间时,我们称为正肘。
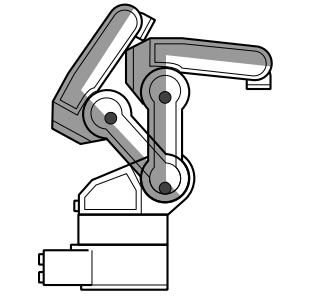
当在这个区间之外时,我们称为反肘。
1 轴
当 1 轴处于-90°~+90° 区间时,也就是机器人正向朝向时称为正面。
当 1 轴不在该区间内时,也就是机器人背部朝向时称为背面。
总结
我们通常使用“俯/仰”、“正肘/反肘”、“正面/背面”来描述六轴机器人的形态。
SCARA 的左右手
在 SCARA 中同一个位姿可以用 1 轴、2 轴大臂向左拐还是向右拐的方式分别到达,所以 SCARA 的形态我们称为左手、右手。如下图。
其它机器人的姿态
:::note 没有姿态的机器人
一般来说没有姿态的机器人对于一个位姿仅有一个形态,如三轴直角机器人等。
:::
七轴机器人的姿态
7 轴机器人时,变为 X,Y,Z,Rx,Ry,Rz,Re +形态。
Re 是显示 7 轴机器人姿势的要素,不会根据指定的坐标系发生变化。
Re 的定义如下。
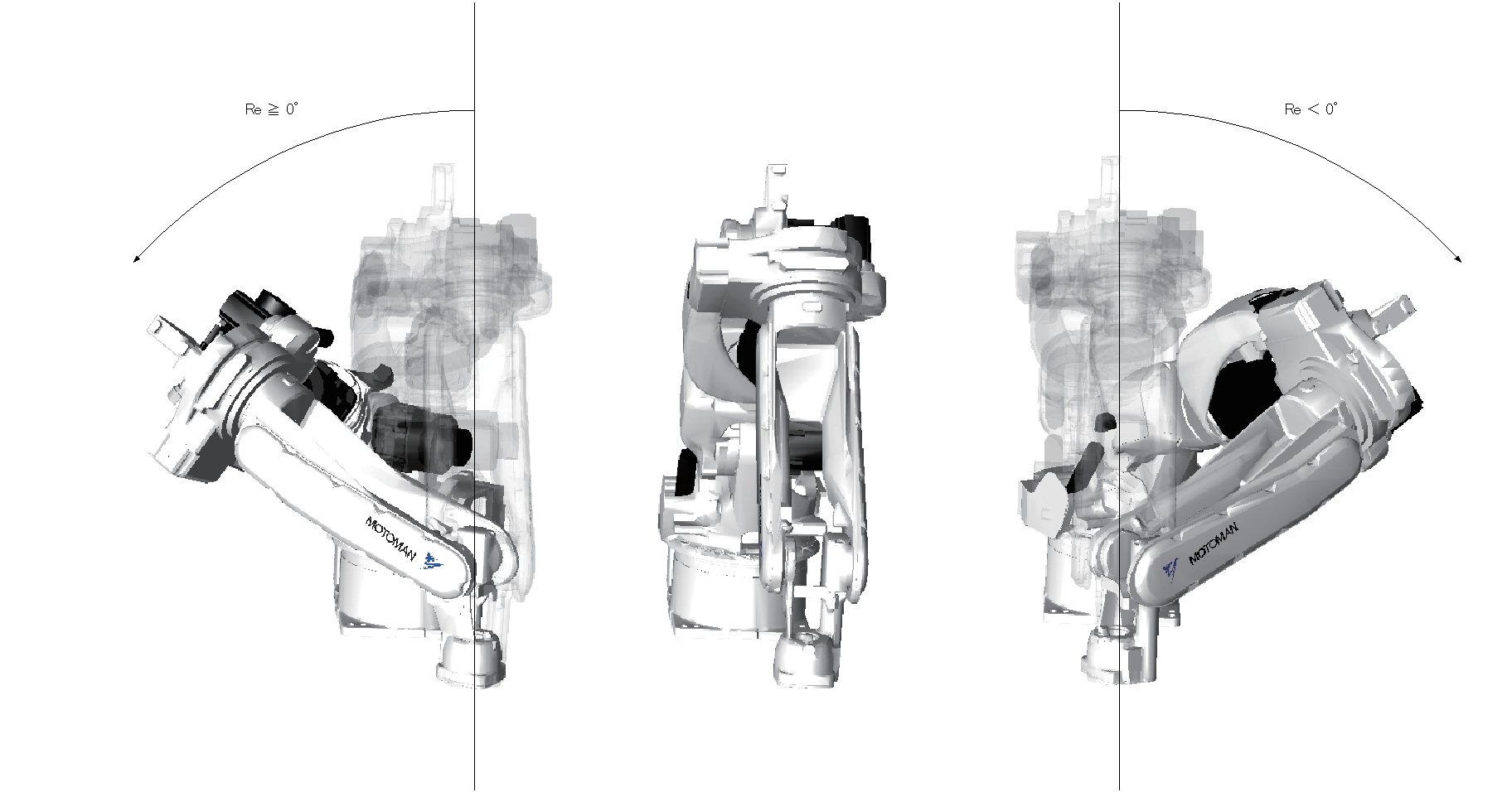
其它与六轴机器人类似。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号