《计算机视觉》第1期
本期主要浅谈学习机器视觉中的一些基本概念,适合新手学习,同时也把学习过程中的一些心得体会分享出来,愿君共勉。
计算机视觉:人类如何能够通过眼睛识别自然界中的一些物体,并在大脑中形成一幅画面,是人类视觉神经中枢经过长久以来地进化所形成的可以判断物体远近视觉器官,计算机视觉就是用各种成象系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释。
脑海中怎么形成三维信息:主要是由阴影、纹理、运动、模糊、遮挡、高光、轮廓、对焦等三维信息构成一种视觉效应。
双目立体视觉:双目立体视觉融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像。(为什么不用单目视觉呢?也就说一个摄像头对于空间上某一个点来说在相机底片上所成的面是没有深度信息的,所以存在深度感知歧义)
平行光轴立体视觉系统
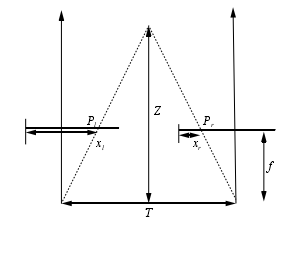
由相似三角形原理可知:深度 Z=T*f/(Xl-Xr);其中Z是深度,T是基线,f是焦距,d=Xl-Xr是视差。
会聚光轴立体视觉系统:
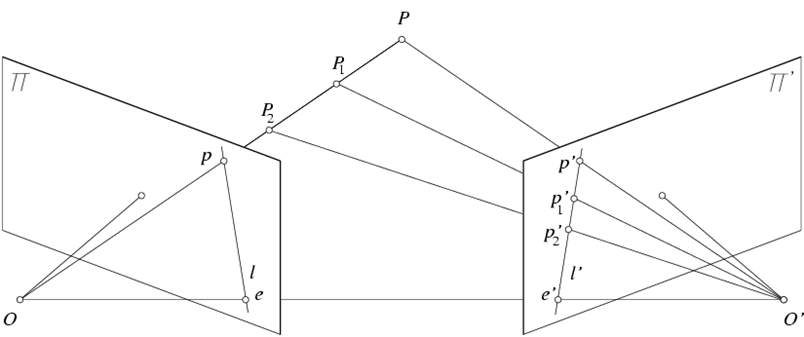
极线约束定理:空间上一点P在π平面上的投影P点与在π'平面上的P'必在平面OPO上,其中可称为对应点或匹配点。对应点必在极线上。
简而言之,立体视觉主要有以下步骤:
(1)图像摄取:主要通过双目摄像头(CCD)对空间图片的获取
(2)系统标定:主要对相机的内部参数(光心、焦距、畸变系数)和外参(旋转矩阵、平移矩阵)的校正,使得左右两幅相机的图片能够平行且共面。
(3)立体匹配:为每个左图像中的像素点f(x,y)搜索对应的右图像中的像素点。
通过以上的学习可以初步地了解到计算机视觉的基本概念以及研究意义,下期会着重的对一些立体匹配方法进行介绍,因为立体匹配方法对于一幅图像的深度图有着至关重要的影响,所以好的立体匹配方法是计算机视觉处理的基础。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号