

STM32F103+步进电机28BYJ-48 简单应用之摇头、转圈、自定义模式demo
@
前言
具体细节内容可以参考:STM32F103+步进电机28BYJ-48+ULN2003 实现简单的正反转demo,这里不再赘述。
代码下载:
功能介绍:
1、LED0在不同模式下根据不同时间进行翻转。
2、按KEY_UP,翻转LED1,切换模式,分别为
- 不工作模式 共0.5秒
- 摇头模式 (顺n个5.625度 停顿x个0.1秒 逆n个5.625度 停顿x个0.1秒) 共0.2x秒
- 转圈模式1 (顺1圈,停顿y个0.1秒) 共0.1y秒
- 转圈模式2 (逆1圈,停顿z个0.1秒) 共0.1z秒
- 自定义模式 (自行修改代码) 共3.5秒
3、按KEY0,翻转LED1,电机顺时针旋转5.625度。按KEY1,翻转LED1,逆时针旋转5.625度。(键盘外部中断)
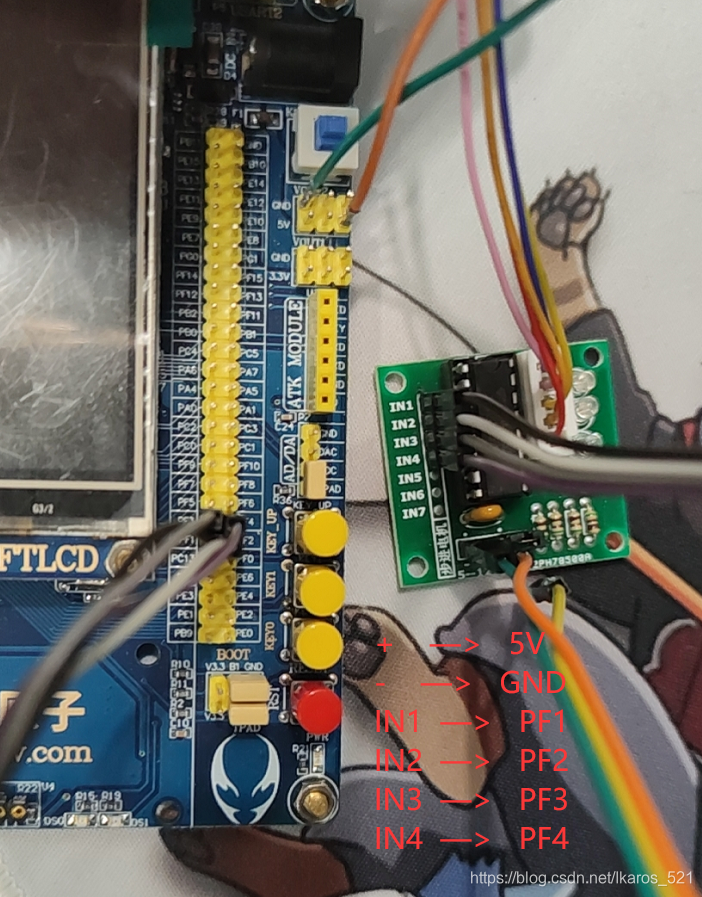
接线
+ —> 5V
- —> GND
IN1 —> PF1
IN2 —> PF2
IN3 —> PF3
IN4 —> PF4
效果图
摇头模式
// 24 * 5.625 = 135
n = 24;
// 0.2 * 10 = 2
x = 10;
(顺n个5.625度 停顿x个0.1秒 逆n个5.625度 停顿x个0.1秒) 共0.2x秒

转圈模式1
// 0.1 * 5 = 0.5
y = 5;
(顺1圈,停顿y个0.1秒) 共0.1y秒

转圈模式2
// 0.1 * 0 = 0
z = 0;
(逆1圈,停顿z个0.1秒) 共0.1z秒

自定义模式

核心代码
main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "beep.h"
#include "step.h"
#include "exti.h"
//IN4: PB6 d
//IN3: PB5 c
//IN2: PB4 b
//IN1: PB3 a
int main(void)
{
// n个5.625度
u8 n = 0;
// 停顿x,y,z个0.1秒
u8 x = 0, y = 0, z = 0;
u8 i = 0;
delay_init(); //延时函数初始化
LED_Init(); //初始化与LED连接的硬件接口
BEEP_Init(); //初始化蜂鸣器端口
EXTIX_Init(); // 初始化外部中断输入
Step_Motor_GPIO_Init(); // 步进电机初始化
LED0 = 0;
BEEP = 0;
// 24 * 5.625 = 135
n = 24;
// 0.2 * 10 = 2
x = 10;
// 0.1 * 5 = 0.5
y = 5;
// 0.1 * 0 = 0
z = 0;
while (1)
{
if(1 == mode) // 摇头模式 (顺n个5.625度 停顿x个0.1秒 逆n个5.625度 停顿x个0.1秒) 共0.2x秒
{
motor_circle(n, 0, 2);
for(i = 0; i < x; i++)
{
delay_ms(100);
}
motor_circle(n, 1, 2);
for(i = 0; i < x; i++)
{
delay_ms(100);
}
}
else if(2 == mode) // 转圈模式1 (顺1圈,停顿y个0.1秒) 共0.1y秒
{
motor_circle(64, 0, 2);
for(i = 0; i < y; i++)
{
delay_ms(100);
}
}
else if(3 == mode) // 转圈模式2 (逆1圈,停顿z个0.1秒) 共0.1z秒
{
motor_circle(64, 1, 2);
for(i = 0; i < z; i++)
{
delay_ms(100);
}
}
else if(4 == mode) // 自定义模式 (自行修改代码) 共3.5秒
{
motor_circle(1, 0, 2);
delay_ms(500);
motor_circle(2, 0, 2);
delay_ms(500);
motor_circle(4, 0, 2);
delay_ms(500);
motor_circle(8, 0, 2);
delay_ms(500);
motor_circle(16, 0, 2);
delay_ms(500);
motor_circle(32, 0, 2);
delay_ms(500);
motor_circle(64, 0, 2);
delay_ms(500);
}
else // 不工作模式 共0.5秒
{
delay_ms(500);
}
LED0 = !LED0;
}
}
step.h
#ifndef __STEP_H__
#define __STEP_H__
#include "stm32f10x.h"
void Step_Motor_GPIO_Init(void);
/*
功能:转1/64圈
步距角5.625 360/5.625=64 减速比1/64
故64*64个脉冲转一圈
n 圈数
direction 方向 1正转 非1反转
delay delay时长 >= 2
*/
void motor_circle(int n, int direction, int delay);
#endif
step.c
#include "sys.h"
#include "delay.h"
#include "step.h"
//IN4: PF4 d
//IN3: PF3 c
//IN2: PF2 b
//IN1: PF1 a
u8 forward[4] = {0x03,0x06,0x0c,0x09}; // 正转
u8 reverse[4]= {0x03,0x09,0x0c,0x06}; // 反转
//引脚初始化
void Step_Motor_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOF, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4|GPIO_Pin_3|GPIO_Pin_2|GPIO_Pin_1;
GPIO_Init(GPIOF, &GPIO_InitStructure);
}
//引脚映射
void SetMotor(unsigned char InputData)
{
if(InputData == 0x03)
{
GPIO_SetBits(GPIOF,GPIO_Pin_1);
GPIO_SetBits(GPIOF,GPIO_Pin_2);
GPIO_ResetBits(GPIOF,GPIO_Pin_3);
GPIO_ResetBits(GPIOF,GPIO_Pin_4);
}
else if(InputData == 0x06)
{
GPIO_ResetBits(GPIOF,GPIO_Pin_1);
GPIO_SetBits(GPIOF,GPIO_Pin_2);
GPIO_SetBits(GPIOF,GPIO_Pin_3);
GPIO_ResetBits(GPIOF,GPIO_Pin_4);
}
else if(InputData == 0x09)
{
GPIO_SetBits(GPIOF,GPIO_Pin_1);
GPIO_ResetBits(GPIOF,GPIO_Pin_2);
GPIO_ResetBits(GPIOF,GPIO_Pin_3);
GPIO_SetBits(GPIOF,GPIO_Pin_4);
}
else if(InputData == 0x0c)
{
GPIO_ResetBits(GPIOF,GPIO_Pin_1);
GPIO_ResetBits(GPIOF,GPIO_Pin_2);
GPIO_SetBits(GPIOF,GPIO_Pin_3);
GPIO_SetBits(GPIOF,GPIO_Pin_4);
}
else if(InputData == 0x00)
{
GPIO_ResetBits(GPIOF,GPIO_Pin_1);
GPIO_ResetBits(GPIOF,GPIO_Pin_2);
GPIO_ResetBits(GPIOF,GPIO_Pin_3);
GPIO_ResetBits(GPIOF,GPIO_Pin_4);
}
}
/*
功能:转1/64圈
步距角5.625 360/5.625=64 减速比1/64
故64*64个脉冲转一圈
n 圈数
direction 方向 1正转 非1反转
delay delay时长ms >= 2
*/
void motor_circle(int n, int direction, int delay)
{
int i, j;
for(i = 0; i < n * 8; i++)
{
for(j = 0; j < 4; j++)
{
if(1 == direction)
{
SetMotor(0x00);
SetMotor(forward[j]);
}
else
{
SetMotor(0x00);
SetMotor(reverse[j]);
}
delay_ms(delay > 2 ? delay : 2);
}
}
}
exti.h
#ifndef __EXTI_H
#define __EXIT_H
#include "sys.h"
// 工作模式标志位
extern u8 mode;
void EXTIX_Init(void);//外部中断初始化
#endif
exti.c
#include "exti.h"
#include "led.h"
#include "key.h"
#include "delay.h"
#include "usart.h"
#include "beep.h"
#include "exti.h"
#include "step.h"
u8 mode = 0;
//外部中断0服务程序
void EXTIX_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
KEY_Init(); // 按键端口初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟
//GPIOE.3 中断线以及中断初始化配置 下降沿触发 //KEY1
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource3);
EXTI_InitStructure.EXTI_Line=EXTI_Line3;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
//GPIOE.4 中断线以及中断初始化配置 下降沿触发 //KEY0
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource4);
EXTI_InitStructure.EXTI_Line=EXTI_Line4;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
//GPIOA.0 中断线以及中断初始化配置 上升沿触发 PA0 WK_UP
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource0);
EXTI_InitStructure.EXTI_Line=EXTI_Line0;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键WK_UP所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn; //使能按键KEY1所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //使能按键KEY0所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
//外部中断0服务程序
void EXTI0_IRQHandler(void)
{
delay_ms(10);//消抖
if(WK_UP==1) //WK_UP按键 工作模式切换
{
mode++;
mode = mode > 4 ? 0 : mode;
}
EXTI_ClearITPendingBit(EXTI_Line0); //清除LINE0上的中断标志位
}
//外部中断3服务程序
void EXTI3_IRQHandler(void)
{
delay_ms(10);//消抖
if(KEY1==0) //按键KEY1
{
// 逆时针转5.625度
motor_circle(1, 1, 2);
LED1 = !LED1;
}
EXTI_ClearITPendingBit(EXTI_Line3); //清除LINE3上的中断标志位
}
void EXTI4_IRQHandler(void)
{
delay_ms(10);//消抖
if(KEY0==0) //按键KEY0
{
// 顺时针转5.625度
motor_circle(1, 0, 2);
LED1 = !LED1;
}
EXTI_ClearITPendingBit(EXTI_Line4); //清除LINE4上的中断标志位
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号