

STM32F103 串口1和串口3对发数据 配合蓝牙模块 实现手机和单片机的简单通信demo
@
目录
前言
开发板:正点原子 STM32F103 精英版
语言:C语言
开发环境:Keil5
使用了 KEY LED USART USB转TTL模块 智向的蓝牙模块(ps:电脑安装驱动CH340)
代码下载:码云 GitHub

代码参考:正点原子 源码 串口实验例程
功能介绍:
1、LED的0.2秒一闪,表示程序正在运行。
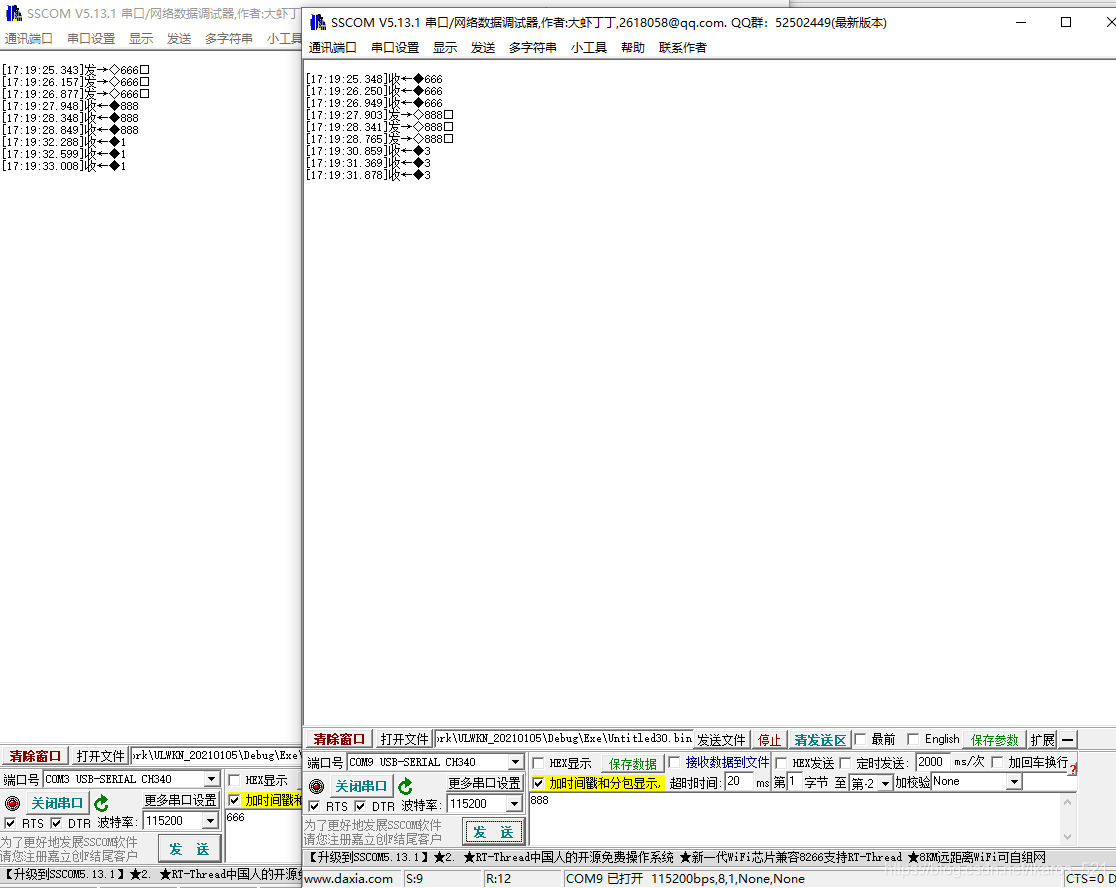
2、串口1收到的数据会发给串口3,串口3收到的数据会发给串口1。
3、按键KEY1按下会向串口1发送数据‘1’,按键KEY0按下会向串口3发送数据‘3’。
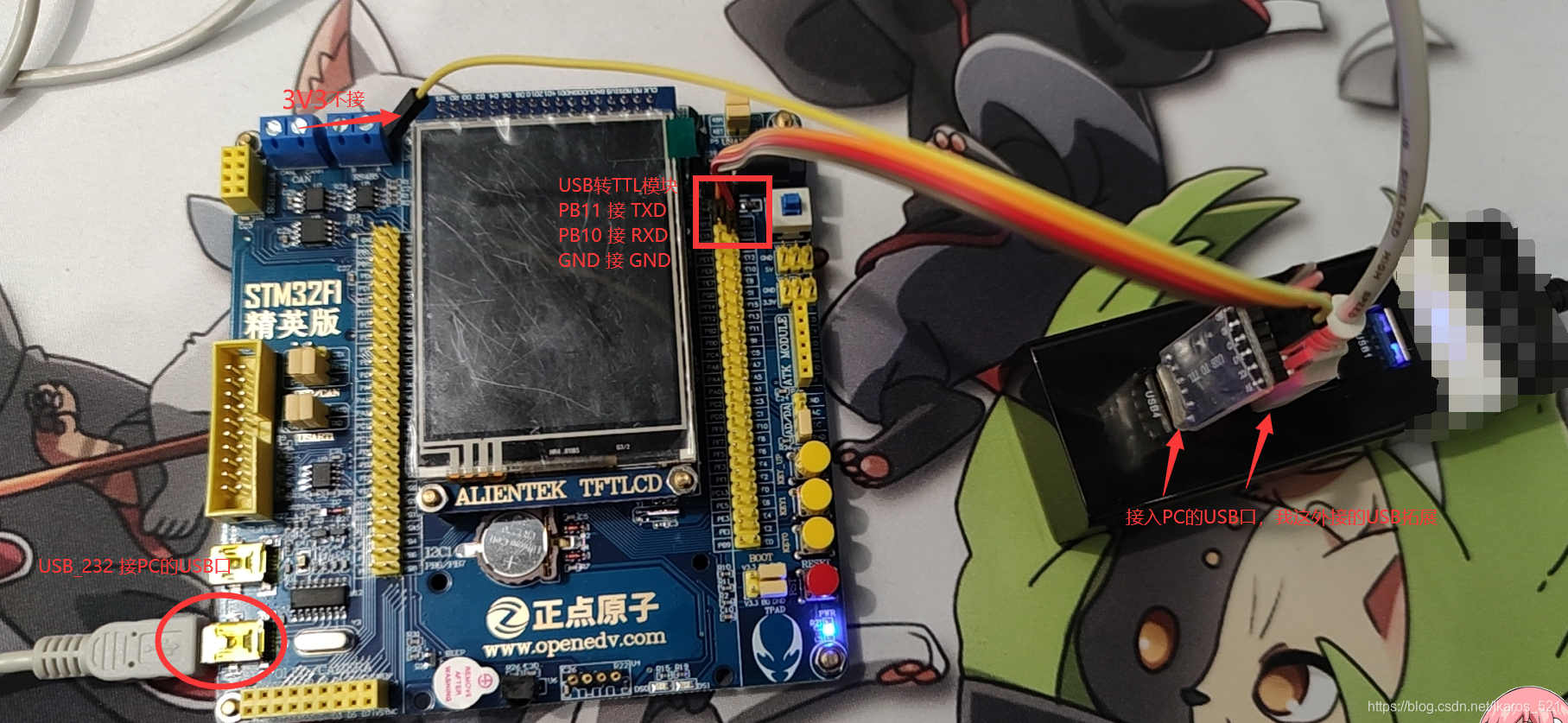
接线
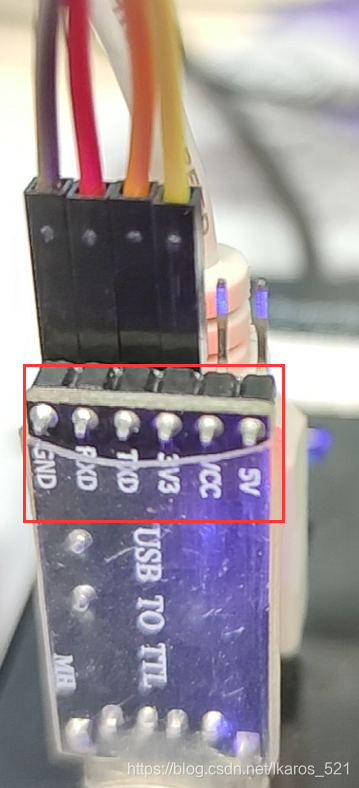
USB转TTL

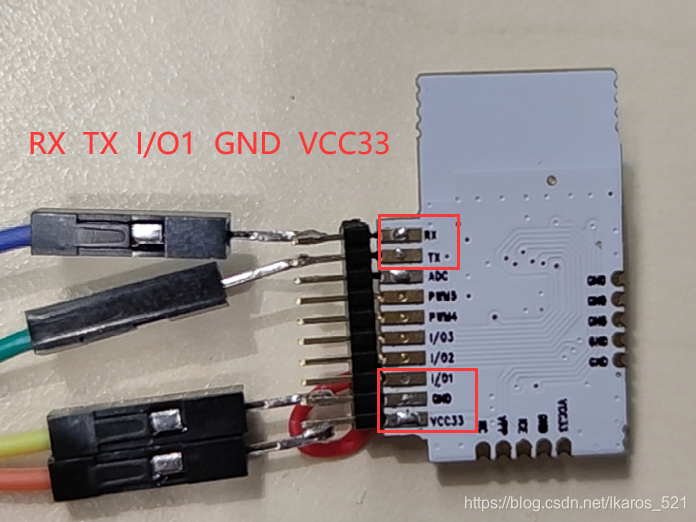
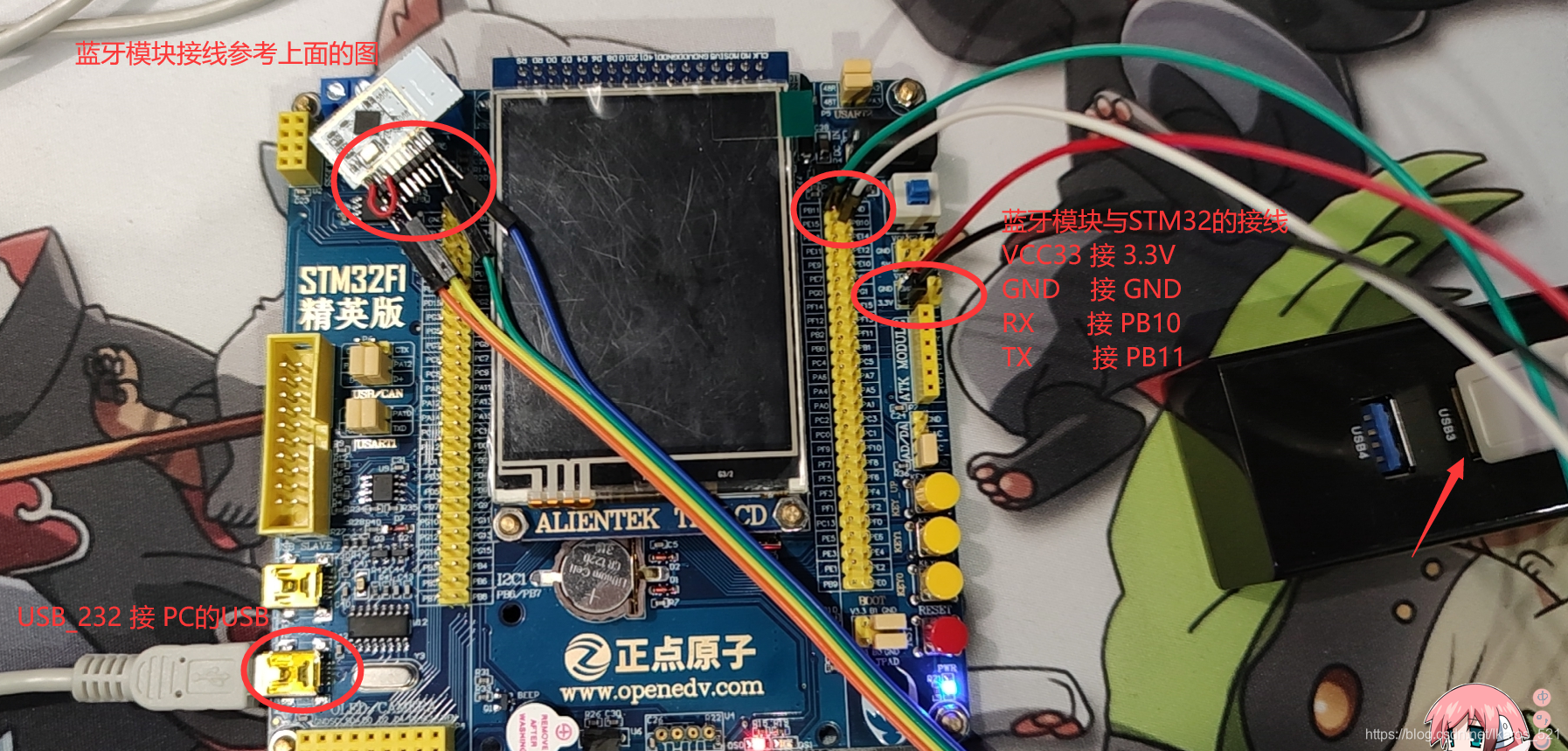
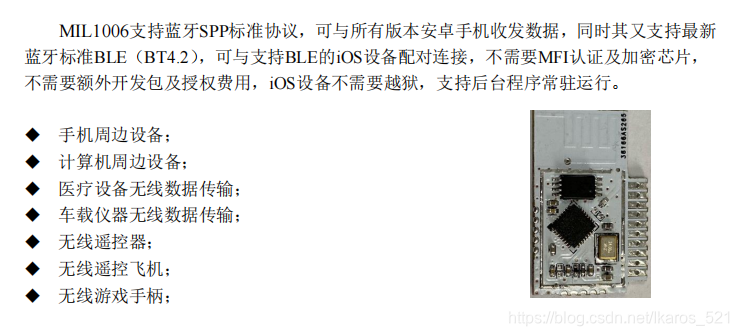
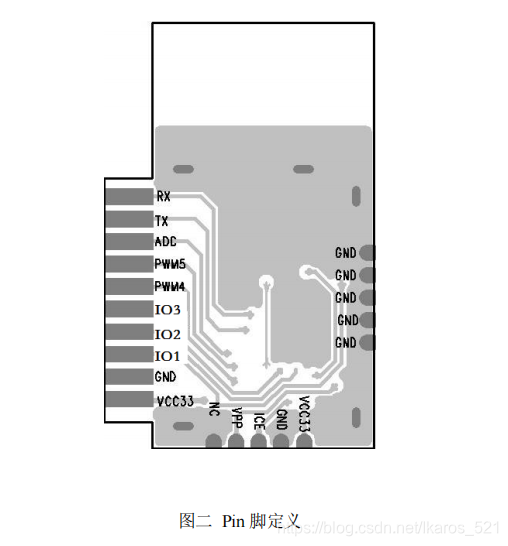
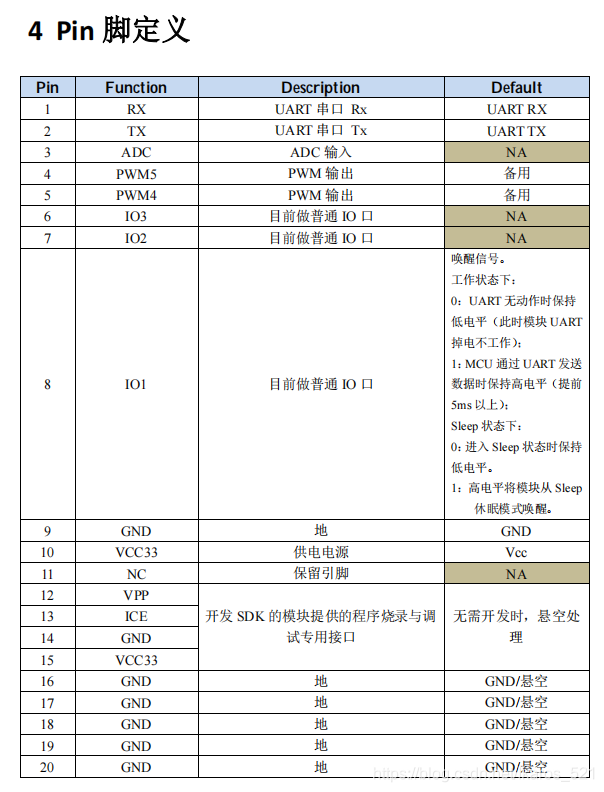
蓝牙

效果图
USB转TTL
蓝牙
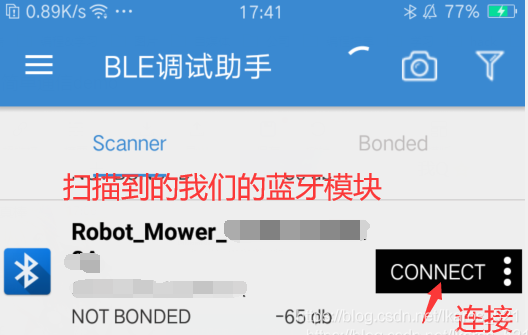
使用的手机软件(安卓)为 BLE调试助手

打开软件、蓝牙、给予权限等
扫描到我们的蓝牙模块,然后连接
连接成功后

点击最下面的 Unkonwn Service,展开,有接收 和 发送 按钮

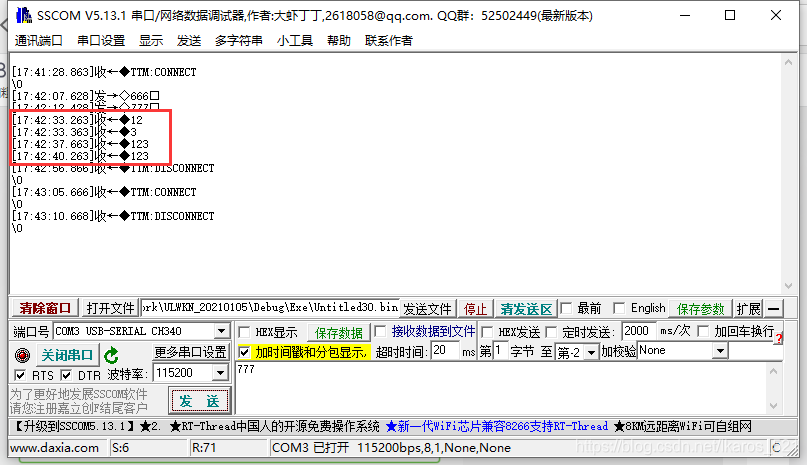
手机收 电脑发

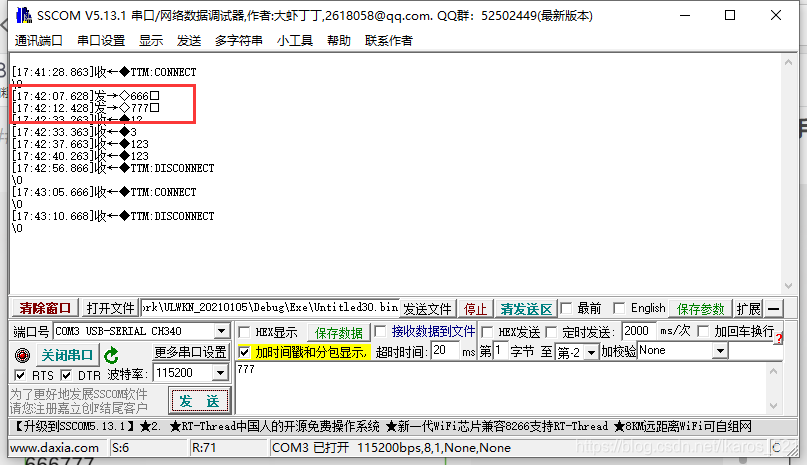
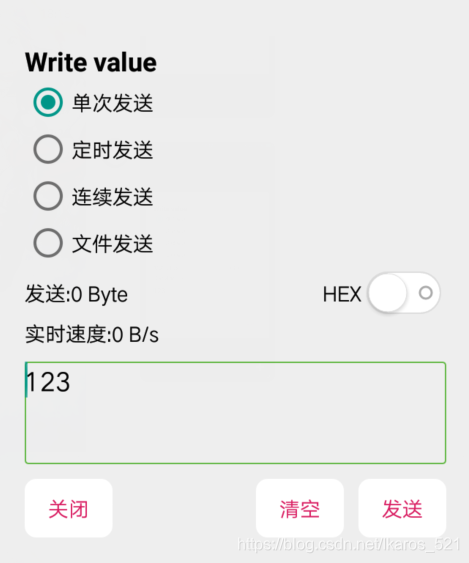
手机发 电脑收
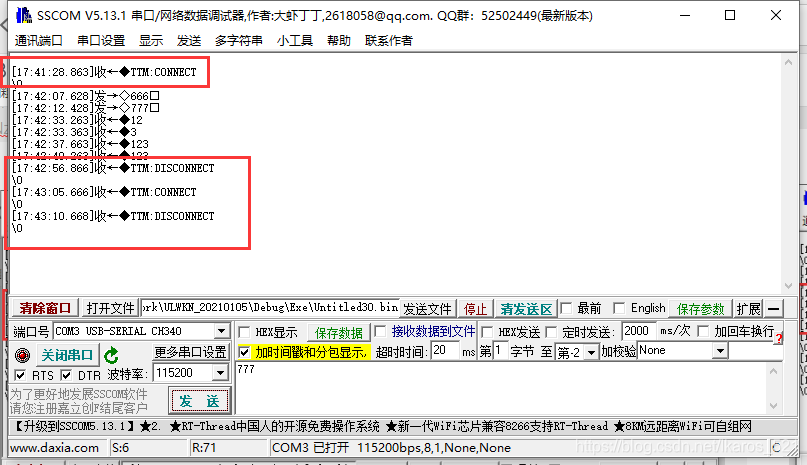
蓝牙的连接/断开
蓝牙收到了手机发来的 连接 和 断开 信息
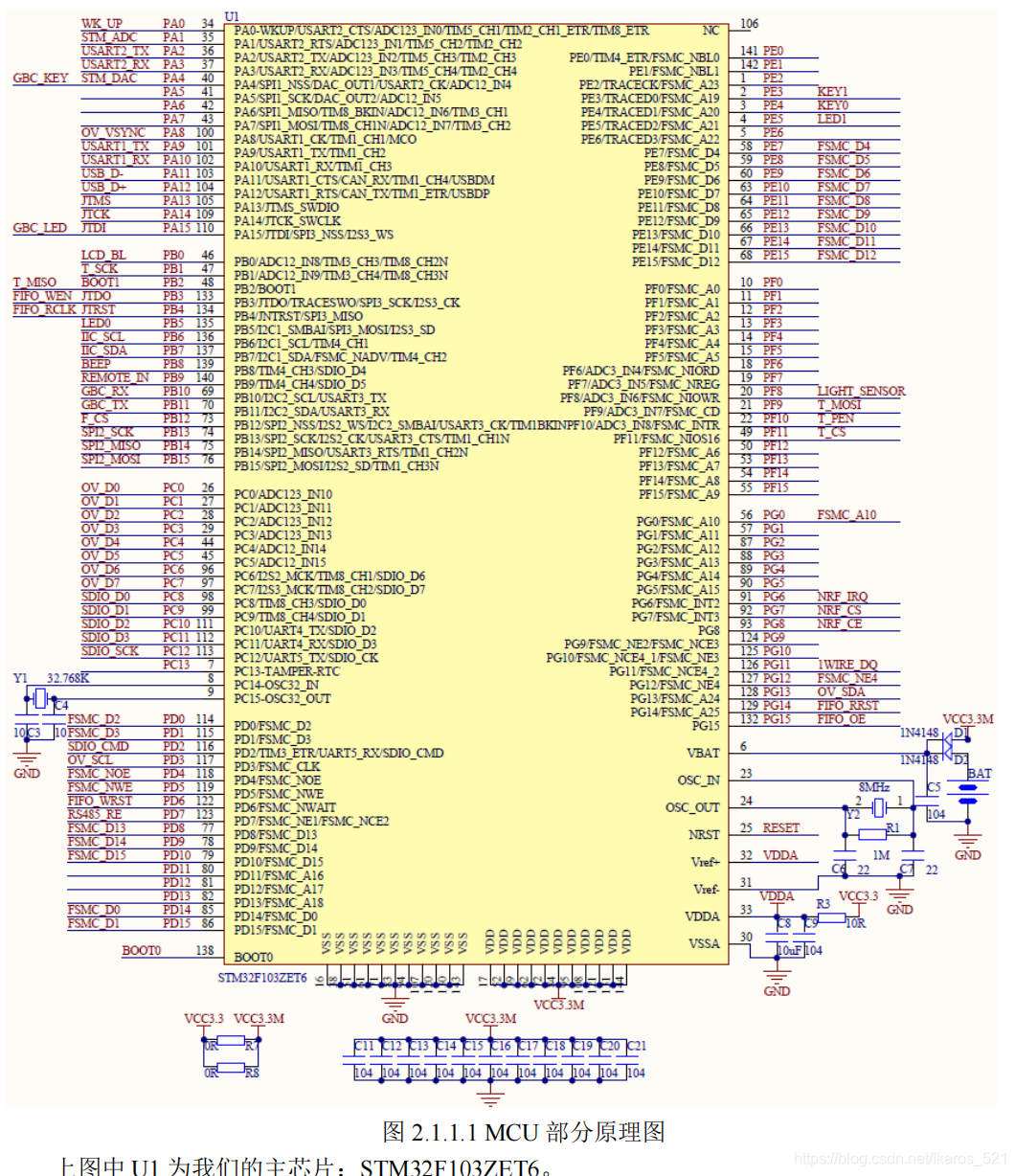
参考用图
STM32F103

蓝牙模块相关
核心代码
main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart1.h"
#include "usart3.h"
// 串口收发函数 type为1,串口1收,发往串口3 type不为1,串口3,发往串口1
void usart_recv_send(u8 type);
int main(void)
{
vu8 key = 0;
delay_init(); // 延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 设置NVIC中断分组2:2位抢占优先级,2位响应优先级
usart1_init(115200); // USART1初始化 波特率115200 默认数据位8 停止位1 校验位none
usart3_init(115200); // USART3初始化 波特率115200 默认数据位8 停止位1 校验位none
LED_Init(); // LED端口初始化
KEY_Init(); // 初始化与按键连接的硬件接口
while (1)
{
// 串口收发
usart_recv_send(1);
usart_recv_send(3);
// 得到键值
key = KEY_Scan(0);
if (key)
{
switch (key)
{
case KEY1_PRES: // 向串口1发送'1'
usart1_send_byte(0x31);
break;
case KEY0_PRES: // 向串口3发送'3'
usart3_send_byte(0x33);
break;
}
}
LED0 = !LED0; //闪烁LED,提示系统正在运行.
delay_ms(100);
}
}
// 串口收发函数 type为1,串口1收,发往串口3 type不为1,串口3,发往串口1
void usart_recv_send(u8 type)
{
u8 i = 0;
u8 tmp_len = 0;
// 数据缓存
static u8 buf[255] = {0};
// 数据长度
u8 buf_len = 0;
// 返回缓存区数据的个数
if(1 == type)
tmp_len = usart1_getdata_count();
else
tmp_len = usart3_getdata_count();
for(i=0; i<tmp_len; i++)
{
// 返回缓存区当前指针所指数据
if(1 == type)
buf[i] = usart1_receive_data();
else
buf[i] = usart3_receive_data();
buf_len++;
// 超过约定的上限长度
if(buf_len >= 250)
{
buf_len=0;
break;
}
}
// 数据不为空
if(0 != buf_len)
{
// 串口数据发送
if(1 == type)
usart3_send_bytes(buf, buf_len);
else
usart1_send_bytes(buf, buf_len);
}
}
usart1.c
#include "usart1.h"
#include "stdio.h"
static uint8_t usart1_buffer[255];
static uint8_t usart1_index;
static uint8_t usart1_count;
// USART1初始化 默认数据位8 停止位1 校验位none
void usart1_init(u32 bound)
{
// GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 使能USART1,GPIOA时钟
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.9
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.10
// Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_InitStructure.USART_BaudRate = bound; // 串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(USART1, &USART_InitStructure); // 初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启串口接受中断
USART_Cmd(USART1, ENABLE); // 使能串口1
usart1_index=0;
usart1_count=0;
}
// 中断服务函数
void USART1_IRQHandler(void)
{
// 接收中断
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
if(usart1_count==usart1_index)
{
// 缓存区无数据,回到起点开始存储
usart1_count=0;
usart1_index=0;
}
usart1_buffer[usart1_count]=USART1->DR;
usart1_count++;
if(usart1_count>=250)
{
// 没有及时取出数据,导致存储位置到达末尾,回到起点
usart1_count=0;
usart1_index=0;
}
}
}
/*返回缓存区数据的个数*/
uint8_t usart1_getdata_count(void)
{
return usart1_count-usart1_index;
}
/*返回缓存区当前指针所指数据*/
uint8_t usart1_receive_data(void)
{
return usart1_buffer[usart1_index++];
}
/*串口数据发送函数
data_send:发送数据
*/
void usart1_send_byte(uint8_t data_send)
{
USART_SendData(USART1, data_send);
while (!(USART1->SR & USART_FLAG_TXE));
}
/*串口数据发送函数
data_buffer:发送数据串的首地址
length:发送数据的长度
*/
void usart1_send_bytes(uint8_t* data_buffer,uint8_t length)
{
uint8_t i;
for(i=0; i<length; i++)
{
usart1_send_byte(data_buffer[i]);
}
}
usart3.c
#include "usart3.h"
#include "stdio.h"
static uint8_t usart3_buffer[255];
static uint8_t usart3_index;
static uint8_t usart3_count;
// USART3初始化 默认 数据位8 停止位1 校验位none
void usart3_init(u32 bound)
{
// GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* config USART3 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); //使能USART3,GPIOB时钟
/* USART3 GPIO config */
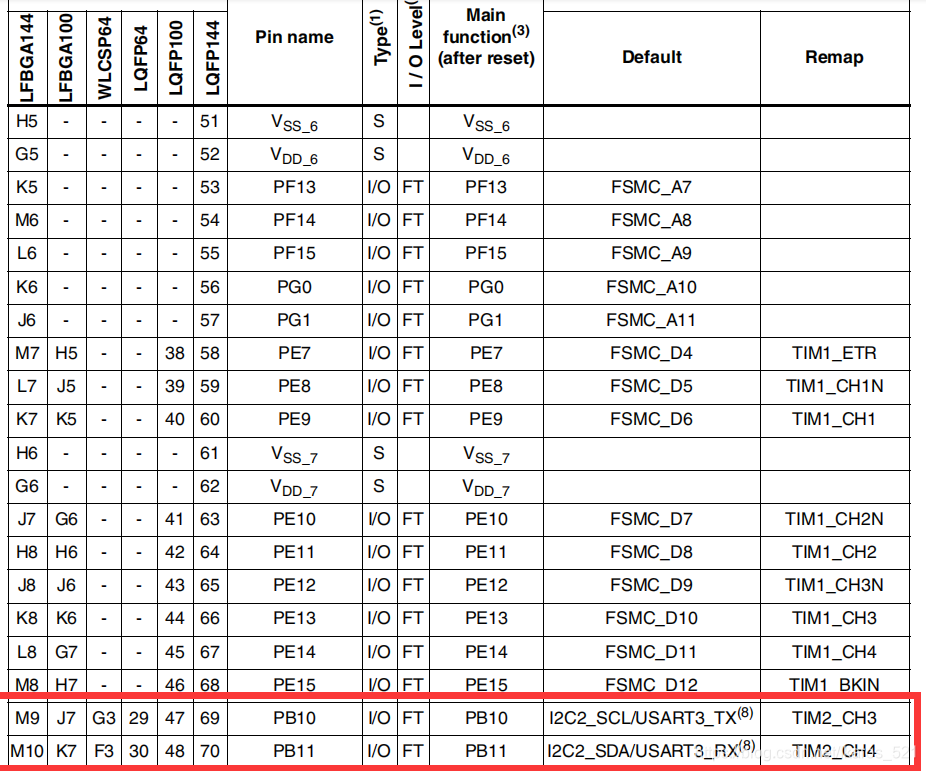
/* Configure USART3 Tx (PB.10) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure USART3 Rx (PB.11) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_InitStructure.USART_BaudRate = bound; // 串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(USART3, &USART_InitStructure); // 初始化串口3
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); // 开启串口接受中断
USART_Cmd(USART3, ENABLE); // 使能串口3
usart3_index=0;
usart3_count=0;
}
// 中断服务函数
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)
{
if(usart3_count==usart3_index)
{
//缓存区无数据,回到起点开始存储
usart3_count=0;
usart3_index=0;
}
usart3_buffer[usart3_count]=USART3->DR;
usart3_count++;
if(usart3_count>=250)
{
//没有及时取出数据,导致存储位置到达末尾,回到起点
usart3_count=0;
usart3_index=0;
}
}
}
/*返回缓存区数据的个数*/
uint8_t usart3_getdata_count(void)
{
return usart3_count-usart3_index;
}
/*返回缓存区当前指针所指数据*/
uint8_t usart3_receive_data(void)
{
return usart3_buffer[usart3_index++];
}
/*串口数据发送函数
data_send:发送数据
*/
void usart3_send_byte(uint8_t data_send)
{
USART_SendData(USART3, data_send);
while (!(USART3->SR & USART_FLAG_TXE));
}
/*串口数据发送函数
data_buffer:发送数据串的首地址
length:发送数据的长度
*/
void usart3_send_bytes(uint8_t* data_buffer,uint8_t length)
{
uint8_t i;
for(i=0; i<length; i++)
{
usart3_send_byte(data_buffer[i]);
}
}
拓展应用
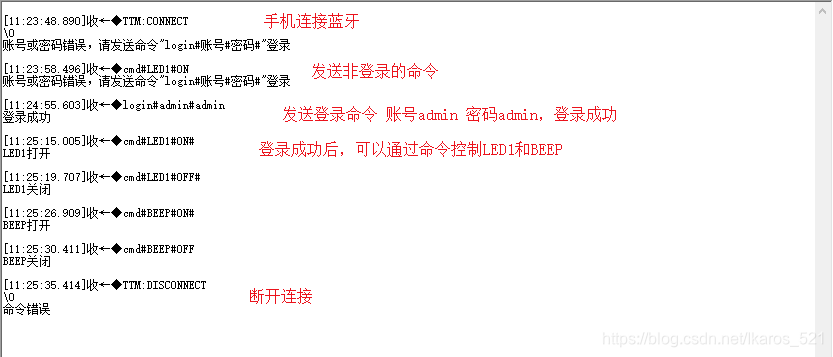
实现简单的账号认证,通过命令控制LED1和蜂鸣器的开关
功能介绍
手机连接蓝牙,发送登录命令login#admin#admin
login#用户名#密码#

登录成功后,发送控制命令
cmd#device#status#
最后发送登出命令cmd#login#out

效果图
代码
main.c
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart1.h"
#include "usart3.h"
#include "string.h"
#include "stdio.h"
#include "beep.h"
u8 login = 0;
u8 username[21] = "admin";
u8 password[21] = "admin";
// 串口收发函数 type为1,串口1收,发往串口3 type不为1,串口3收,发往串口1
void usart_recv_send(u8 type);
// 检查登录 传入收到的数据和数据长度 返回 0验证成功,1账号或密码错误,2数据超长
u8 check_login(u8* buf, u8 len);
/*
函数功能: 命令解析
传参: 收到的数据和数据长度
命令格式: cmd#device#status#
返回: 0不符合规则 1解析成功
*/
u8 cmd_analysis(u8* buf, u8 len);
int main(void)
{
vu8 key = 0;
delay_init(); // 延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 设置NVIC中断分组2:2位抢占优先级,2位响应优先级
usart1_init(115200); // USART1初始化 波特率115200 默认数据位8 停止位1 校验位none
usart3_init(115200); // USART3初始化 波特率115200 默认数据位8 停止位1 校验位none
LED_Init(); // LED端口初始化
KEY_Init(); // 初始化与按键连接的硬件接口
BEEP_Init(); // 蜂鸣器初始化
LED0 = 1;
while (1)
{
// 串口收发
usart_recv_send(1);
usart_recv_send(3);
// 得到键值
key = KEY_Scan(0);
if (key)
{
switch (key)
{
case KEY1_PRES: // 向串口1发送'1'
usart1_send_byte(0x31);
break;
case KEY0_PRES: // 向串口3发送'3'
usart3_send_byte(0x33);
break;
}
}
LED0 = !LED0; //闪烁LED,提示系统正在运行.
delay_ms(100);
}
}
// 串口收发函数 type为1,串口1收,发往串口3 type不为1,串口3收,发往串口1
void usart_recv_send(u8 type)
{
u8 i = 0;
u8 tmp_len = 0;
// 数据缓存
static u8 buf[255] = {0};
//static u8 buf2[255] = {0};
// 数据长度
u8 buf_len = 0;
// 返回缓存区数据的个数
if(1 == type)
tmp_len = usart1_getdata_count();
else
tmp_len = usart3_getdata_count();
for(i=0; i<tmp_len; i++)
{
// 返回缓存区当前指针所指数据
if(1 == type)
buf[i] = usart1_receive_data();
else
buf[i] = usart3_receive_data();
buf_len++;
// 超过约定的上限长度
if(buf_len >= 250)
{
buf_len=0;
break;
}
}
// 数据不为空
if(0 != buf_len)
{
// 串口数据发送
if(1 == type)
usart3_send_bytes(buf, buf_len);
else
{
usart1_send_bytes(buf, buf_len);
printf("\r\n");
// 如果没有登录
if(0 == login)
{
// 检查登录
if(0 == check_login(buf, buf_len))
{
login = 1;
printf("登录成功\r\n");
}
else if(2 == check_login(buf, buf_len))
{
printf("账号或密码超长\r\n");
}
else if(3 == check_login(buf, buf_len))
{
printf("命令过短,请发送命令\"login#账号#密码#\"登录\r\n");
}
else
{
printf("账号或密码错误,请发送命令\"login#账号#密码#\"登录\r\n");
}
}
// 已经登录
else
{
cmd_analysis(buf, buf_len);
}
}
}
}
// 检查登录 传入收到的数据 返回 0验证成功,1账号或密码错误,2数据超长,3数据过短
u8 check_login(u8* buf, u8 len)
{
u8 i = 0, j = 0;
u8 str_username[21] = {0};
u8 str_password[21] = {0};
if(len < 9)
{
return 3;
}
// 登录命令
if(buf[0] == 'l' && buf[1] == 'o' && buf[2] == 'g' && buf[3] == 'i' && buf[4] == 'n' && buf[5] == '#')
{
// 解析数据获取username和password 分隔符为'#'
j = 0;
i = 6;
while(buf[i] != '#' && i < len)
{
// 数据超长
if(j >= 20)
{
return 2;
}
str_username[j++] = buf[i++];
}
str_username[j] = '\0';
j = 0;
i++;
while(buf[i] != '#' && i < len)
{
// 数据超长
if(j >= 20)
{
return 2;
}
str_password[j++] = buf[i++];
}
str_password[j] = '\0';
if(0 == strcmp((char *)str_username, (char *)username) && 0 == strcmp((char *)str_password, (char *)password))
{
return 0;
}
else
{
return 1;
}
}
else
{
return 1;
}
}
/*
函数功能: 命令解析
命令格式: cmd#device#status#
返回: 0不符合规则 1解析成功
*/
u8 cmd_analysis(u8* buf, u8 len)
{
u8 device[10] = {0};
u8 status[6] = {0};
u8 i = 0, j = 0;
if(len < 7)
{
printf("命令过短\r\n");
return 0;
}
// 命令格式校验
if(buf[0] == 'c' && buf[1] == 'm' && buf[2] == 'd' && buf[3] == '#')
{
// 解析数据获取devicestatus 分隔符为'#'
j = 0;
i = 4;
while(buf[i] != '#' && i < len)
{
// 数据超长
if(j >= 9)
{
printf("device超长\r\n");
return 0;
}
device[j++] = buf[i++];
}
device[j] = '\0';
j = 0;
i++;
while(buf[i] != '#' && i < len)
{
// 数据超长
if(j >= 5)
{
printf("status超长\r\n");
return 0;
}
status[j++] = buf[i++];
}
status[j] = '\0';
// LED1的命令 ON/OFF
if(0 == strcmp((char *)device, "LED1"))
{
if(0 == strcmp((char *)status, "ON"))
{
LED1 = 0;
printf("LED1打开\r\n");
return 1;
}
else if(0 == strcmp((char *)status, "OFF"))
{
LED1 = 1;
printf("LED1关闭\r\n");
return 1;
}
else
{
printf("命令错误\r\n");
return 0;
}
}
else if(0 == strcmp((char *)device, "BEEP"))
{
if(0 == strcmp((char *)status, "ON"))
{
BEEP = 1;
printf("BEEP打开\r\n");
return 1;
}
else if(0 == strcmp((char *)status, "OFF"))
{
BEEP = 0;
printf("BEEP关闭\r\n");
return 1;
}
else
{
printf("命令错误\r\n");
return 0;
}
}
else if(0 == strcmp((char *)device, "login"))
{
if(0 == strcmp((char *)status, "out"))
{
login = 0;
printf("账号登出\r\n");
return 1;
}
else
{
printf("命令错误\r\n");
return 0;
}
}
else
{
printf("命令错误\r\n");
return 0;
}
}
else
{
printf("命令错误\r\n");
return 0;
}
}
usart1.c
#include "usart1.h"
#include "stdio.h"
static uint8_t usart1_buffer[255];
static uint8_t usart1_index;
static uint8_t usart1_count;
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
// USART1初始化 默认数据位8 停止位1 校验位none
void usart1_init(u32 bound)
{
// GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
/* config USART1 clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 使能USART1,GPIOA时钟
/* USART1 GPIO config */
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化GPIOA.9
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化GPIOA.10
// Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
USART_InitStructure.USART_BaudRate = bound; // 串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; // 无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收发模式
USART_Init(USART1, &USART_InitStructure); // 初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); // 开启串口接受中断
USART_Cmd(USART1, ENABLE); // 使能串口1
usart1_index=0;
usart1_count=0;
}
// 中断服务函数
void USART1_IRQHandler(void)
{
// 接收中断
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
if(usart1_count==usart1_index)
{
// 缓存区无数据,回到起点开始存储
usart1_count=0;
usart1_index=0;
}
usart1_buffer[usart1_count]=USART1->DR;
usart1_count++;
if(usart1_count>=250)
{
// 没有及时取出数据,导致存储位置到达末尾,回到起点
usart1_count=0;
usart1_index=0;
}
}
}
/*返回缓存区数据的个数*/
uint8_t usart1_getdata_count(void)
{
return usart1_count-usart1_index;
}
/*返回缓存区当前指针所指数据*/
uint8_t usart1_receive_data(void)
{
return usart1_buffer[usart1_index++];
}
/*串口数据发送函数
data_send:发送数据
*/
void usart1_send_byte(uint8_t data_send)
{
USART_SendData(USART1, data_send);
while (!(USART1->SR & USART_FLAG_TXE));
}
/*串口数据发送函数
data_buffer:发送数据串的首地址
length:发送数据的长度
*/
void usart1_send_bytes(uint8_t* data_buffer,uint8_t length)
{
uint8_t i;
for(i=0; i<length; i++)
{
usart1_send_byte(data_buffer[i]);
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号