Path Bounds Decider
前面几个decider更偏向于make decision,通过外部环境选择自车的动作
接下来的目标是根据道路、障碍物以及前几步的decision-making建立数学模型来求解轨迹
视频:
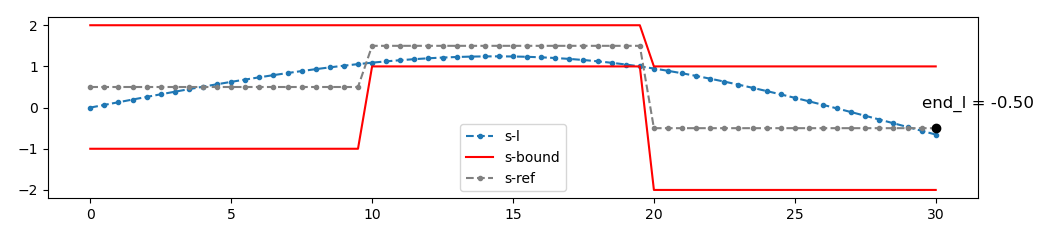
如上图所示,在frenet坐标系下,假设自车目前位置为s=0,l = 0
将车道线和障碍物转为自车两侧的边界线(图中红线),再均分得到中心线(灰线),
通过设计cost,将轨迹求解问题转为在boundary内求解l,dl,ddl,使cost最小的二次规划问题(通过求解器进行求解,图中蓝线为得到的解)。
Path Bound Decider的目的就是将车道线和障碍物转为上图中的边界
初始化
Task初始化,根据参考线建立frenet坐标系,计算自车在frenet坐标系中的位置(s,l,s',l'),同时计算自车到车道中心线的距离以及左右车道宽度。
接下来生成path bound,每个path bound都会在后续生成一条轨迹。
Fall Back pathbound
首先生成一条默认的fall back pathbound,在正常求解轨迹无解或失败的情况下使用。
长度为(车速×8秒 , 100m)取大,间距为0.5m。
接下来遍历前方道路,依据下方规则生成左右两侧的boundary
如图:
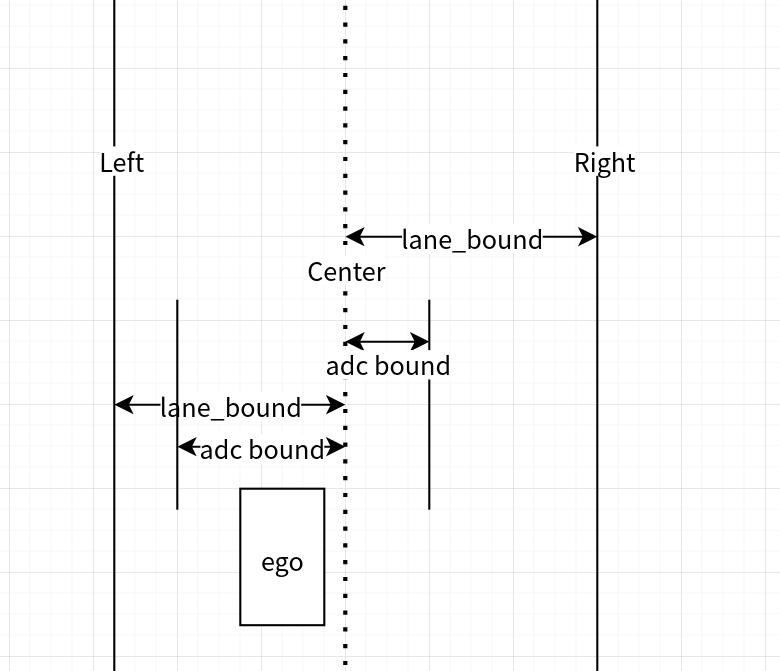
根据车道生成左右的lane_bound,从地图中获得
根据自车状态生成adc_bound,adc_bound = adc_l_to_lane_center_ + ADC_speed_buffer + adc_half_width + ADC_buffer
上式中的各项:
adc_l_to_lane_center_ - 自车
adc_half_width - 车宽
adc_buffer - 0.5
左侧当前s对应的bound取MAX(left_lane_bound,left_adc_bound),
右侧当前s对应的bound取MIN(right_lane_bound,right_adc_bound)(取远的)
ADCSpeedBuffer表示横向的瞬时位移? 公式如下:
其中kMaxLatAcc = 1.5
Regular Path Bound
接下来生成常规path boundary,根据当前场景(pull_over,lane_change,lane_borrow)选择对应的生成方法。以常规的LaneBorrowPath Bound为例:
Lane Borrow Path Bound
默认会生成一条不借道的bound,从path_decider_status中取出当前的借道状态,
有左换道就生成一条左换道的bound,
有右换道就生成一条右换道的bound,
都有就都生成。
// Generate regular path boundaries.
std::vector<LaneBorrowInfo> lane_borrow_info_list;
lane_borrow_info_list.push_back(LaneBorrowInfo::NO_BORROW);
if (reference_line_info->is_path_lane_borrow()) {
const auto& path_decider_status =
injector_->planning_context()->planning_status().path_decider();
for (const auto& lane_borrow_direction :
path_decider_status.decided_side_pass_direction()) {
if (lane_borrow_direction == PathDeciderStatus::LEFT_BORROW) {
lane_borrow_info_list.push_back(LaneBorrowInfo::LEFT_BORROW);
} else if (lane_borrow_direction == PathDeciderStatus::RIGHT_BORROW) {
lane_borrow_info_list.push_back(LaneBorrowInfo::RIGHT_BORROW);
}
}
}
根据车道和自车状态生成boundary和上方fallback是一样的,adc_buffer调整为了0.1
// 2. Decide a rough boundary based on lane info and ADC's position
if (!GetBoundaryFromLanesAndADC(reference_line_info, lane_borrow_info, 0.1,
path_bound, borrow_lane_type)) {
const std::string msg =
"Failed to decide a rough boundary based on "
"road information.";
AERROR << msg;
return Status(ErrorCode::PLANNING_ERROR, msg);
}
然后根据静态障碍物生成boundary,记录block位置之前的boundary。
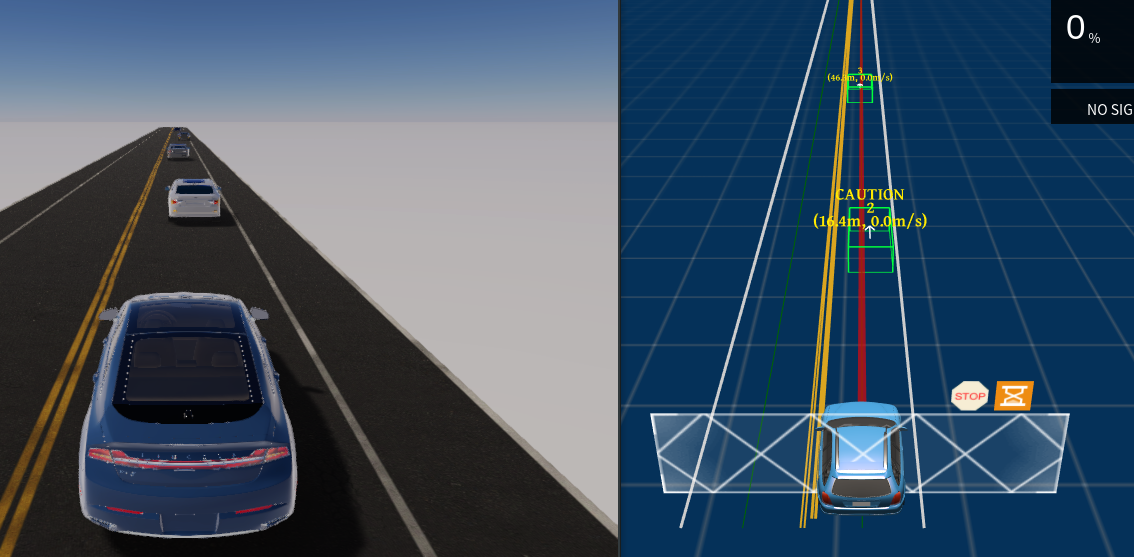
场景示例如下:
PathBound temp_path_bound = *path_bound;
if (!GetBoundaryFromStaticObstacles(reference_line_info.path_decision(),
path_bound, blocking_obstacle_id)) {
const std::string msg =
"Failed to decide fine tune the boundaries after "
"taking into consideration all static obstacles.";
AERROR << msg;
return Status(ErrorCode::PLANNING_ERROR, msg);
}
// Append some extra path bound points to avoid zero-length path data.
int counter = 0;
while (!blocking_obstacle_id->empty() &&
path_bound->size() < temp_path_bound.size() &&
counter < kNumExtraTailBoundPoint) {
path_bound->push_back(temp_path_bound[path_bound->size()]);
counter++;
}
先来筛选障碍物,障碍物筛选规则如下,需要符合以下所有的条件,才加到obs_list中:
- 不是虚拟障碍物
- 不是可忽略的障碍物(其他decider中添加的ignore decision)
- 静态障碍物或速度小于FLAGS_static_obstacle_speed_threshold(0.5m/s)
- 在自车的前方
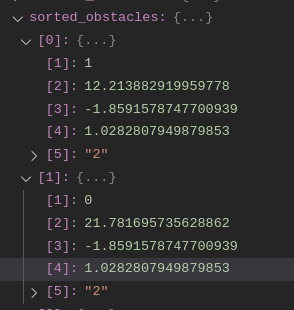
接下来将每个障碍物分解成两个ObstacleEdge,起点一个终点一个,记录下s,start_l,end_l,最后按s排序
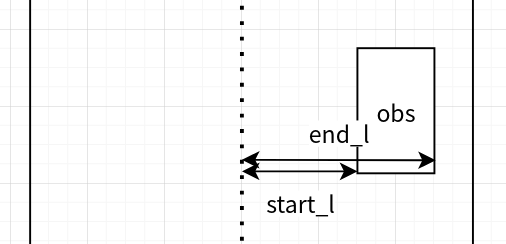
对于上图场景中id为2的obstacle,sort后得到的内部数据结构为:
for (const auto* obstacle : indexed_obstacles.Items()) {
// Only focus on those within-scope obstacles.
if (!IsWithinPathDeciderScopeObstacle(*obstacle)) {
continue;
}
// Only focus on obstacles that are ahead of ADC.
if (obstacle->PerceptionSLBoundary().end_s() < adc_frenet_s_) {
continue;
}
// Decompose each obstacle's rectangle into two edges: one at
// start_s; the other at end_s.
const auto obstacle_sl = obstacle->PerceptionSLBoundary();
sorted_obstacles.emplace_back(
1, obstacle_sl.start_s() - FLAGS_obstacle_lon_start_buffer,
obstacle_sl.start_l() - FLAGS_obstacle_lat_buffer,
obstacle_sl.end_l() + FLAGS_obstacle_lat_buffer, obstacle->Id());
sorted_obstacles.emplace_back(
0, obstacle_sl.end_s() + FLAGS_obstacle_lon_end_buffer,
obstacle_sl.start_l() - FLAGS_obstacle_lat_buffer,
obstacle_sl.end_l() + FLAGS_obstacle_lat_buffer, obstacle->Id());
}
std::sort(sorted_obstacles.begin(), sorted_obstacles.end(),
[](const ObstacleEdge& lhs, const ObstacleEdge& rhs) {
if (std::get<1>(lhs) != std::get<1>(rhs)) {
return std::get<1>(lhs) < std::get<1>(rhs);
} else {
return std::get<0>(lhs) > std::get<0>(rhs);
}
});
依次遍历按S排列的ObstacleEdge后,得到bound,就是下图中的红线
整体思路类似一条直线向前扫,扫到ObstacleEdge进入或退出就更新一下边界,
当左边界和右边界有重叠时,认为参考线被blocked,记录下位置。
Reference
ReferenceLine::ToFrenetFrame
需要将起点转为frenet坐标系
cartesian to frenet reference :
Frenet坐标系与Cartesian坐标系互转
Apollo项目坐标系研究

 浙公网安备 33010602011771号
浙公网安备 33010602011771号