

stm32测量信号频率及占空比
版权声明:本文为CSDN博主「Mr Justin」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_43368814/java/article/details/103439564
基于stm32f103单片机对信号频率、占空比的测量。
最近开始仪器仪表方面的学习了,计划后期做一个示波器。所以这周就在stm32f103上面做了一个测量频率、占空比的小设计。总体上精度还是比较高的,测量频率量程在35Hz—190KHz。频率可以精确到小数点后四位,占空比测量的精度也比较高,可以到小数点后两位。
说到用stm32测频率,都会想到用定时器的输入捕获模式,只需要一个定时器和一个IO口即可,前几天在论坛上看到还有一种是用两个定时器测频率,一个定时器用来检测信号跳变沿,另外一个用来精准定时,比如说用TIM1检测跳变沿(假设为上升沿),TIM2开一个1s的定时器中断,这个1s就比较准确,在1s内TM1检测到了多少个上升沿改信号的频率就是多少。这种方法我本周二试过,精度比输入捕获模式下的高,而且还比较稳定,缺点是用到了两个定时器,占用的cpu资源较多。考虑到我后面任务需要,定时器可能会不够用,故还是用的输入捕获模式。
实验平台:stm32f103zet6
定时器及通道:TIM2的通道2
IO口:PA1
定时器及输入捕获模式的配置:

u8 Edge_Flag; //高低电平的标志位 u16 Rising,Falling,Rising_Last; //定时器2输入捕获中断初始化 void TIM2_Cap_Init() { GPIO_InitTypeDef GPIO_InitStruct; TIM_TimeBaseInitTypeDef TIM_InitStruct; TIM_ICInitTypeDef TIM_ICInitStruct; NVIC_InitTypeDef NVIC_InitStruct; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); GPIO_InitStruct.GPIO_Pin=GPIO_Pin_1; GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空 GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStruct); TIM_InitStruct.TIM_ClockDivision=TIM_CKD_DIV1; TIM_InitStruct.TIM_CounterMode=TIM_CounterMode_Up; //向上计数 TIM_InitStruct.TIM_Period=0xffff; TIM_InitStruct.TIM_Prescaler=0; //分频系数 当分频系数越大时,可测量频率最小值越小 TIM_TimeBaseInit(TIM2,&TIM_InitStruct); TIM_ICInitStruct.TIM_Channel=TIM_Channel_2; TIM_ICInitStruct.TIM_ICFilter=0x00; //不滤波 TIM_ICInitStruct.TIM_ICPolarity=TIM_ICPolarity_Rising; //第一次是检测上升沿进入中断 TIM_ICInitStruct.TIM_ICPrescaler=TIM_ICPSC_DIV1; TIM_ICInitStruct.TIM_ICSelection=TIM_ICSelection_DirectTI; //直接映射 TIM_ICInit(TIM2,&TIM_ICInitStruct); TIM_ITConfig(TIM2,TIM_IT_CC2,ENABLE); NVIC_InitStruct.NVIC_IRQChannel=TIM2_IRQn; NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE; NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0x00; //抢占优先级 NVIC_InitStruct.NVIC_IRQChannelSubPriority=0x01; //响应优先级 NVIC_Init(&NVIC_InitStruct); TIM_Cmd(TIM2,ENABLE); //使能 }
定时器2的中断服务函数:
void TIM2_IRQHandler(void) { if(TIM_GetITStatus(TIM2,TIM_IT_CC2)!=RESET) //捕获到上升沿 { if(Edge_Flag==1) { Rising=TIM2->CCR2; //第一次检测到下降沿 TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Rising); //再次改为上升沿触发 Edge_Flag++; } else if(Edge_Flag==2) { Rising_Last=TIM2->CCR2; TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Rising); Edge_Flag=0; //标志位清0 TIM_SetCounter(TIM2,0); //定时器清0 } else { Falling=TIM2->CCR2; //第一次检测到上升沿 TIM_OC2PolarityConfig(TIM2,TIM_ICPolarity_Falling); //将上升沿触发改为下降沿触发 Edge_Flag++; } } TIM_ClearITPendingBit(TIM2,TIM_IT_CC2); //清除标志位 }
输入捕获模式下,中断服务函数里面处理的内容要尽量少,所以在记录定时器捕获到值时,直接将TIM2的CCR2寄存器里面的值赋值给相应变量。
主函数:
int main(void) { delay_init(); //延时函数初始化 OLED_Init(); //oled屏幕初始化 OLED_On(); OLED_Clear(); TIM2_Cap_Init(); //定时器初始化 while(1) { OLED_ShowString(0,0,"Freq:",16); OLED_ShowString(100,0,"Hz",16); OLED_ShowNum(50,0,72000000/(Rising_Last-Falling),6,16); OLED_ShowString(0,2,"Duty:",16); OLED_ShowString(95,2,"%",16); OLED_Showdecimal(50,2,(float)(Rising-Falling)/(float)(Rising_Last-Falling)*100,2,3,16); delay_ms(100); } }
变量Rising_Last为第二次检测到上升沿捕获到的值,Falling为第一次捕获到的值,两者之差为定时器计数的数值差,根据TIM_Prescaler=0(即不分频),主频为72M,频率f=72M/(Rising_Last-Falling)。而Rising-Falling为高电平的时间,除以一个周期就是占空比了。
实验现象
频率10K,占空比60%
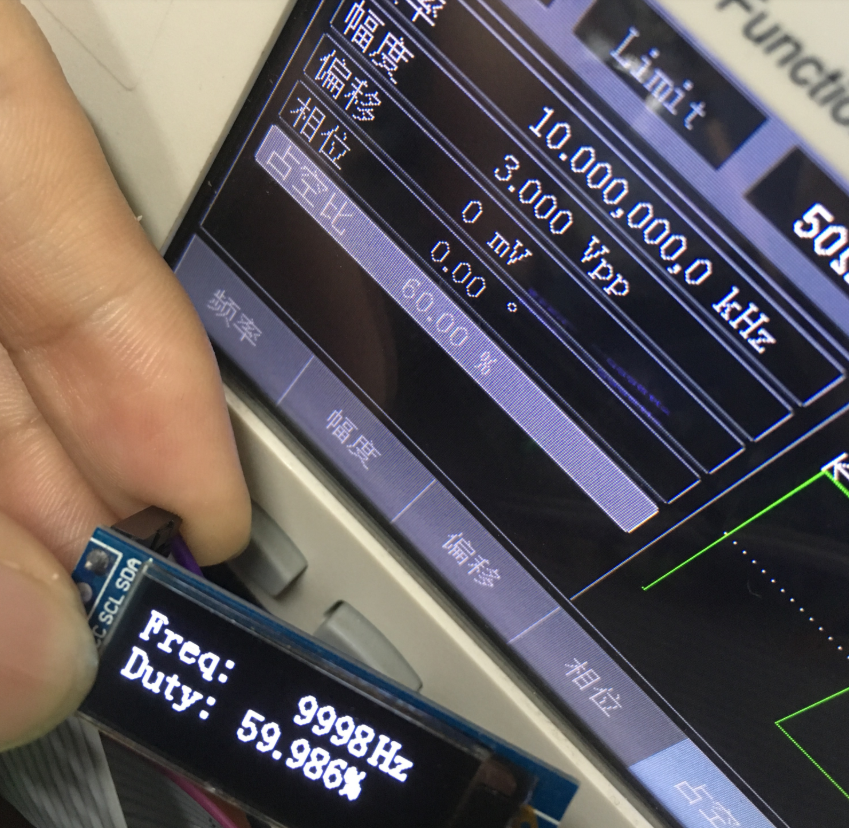
可见效果还是挺不错的,但是这种办法包括上面讲到的双定时器法都有一个缺点,那就是当信号幅度小于2v时,单片机就检测不到跳变沿。外部还需要硬件对信号进行适当放大。也是前几天,在论坛上看到有人提出一个测频率的叫过零检测法,用ADC读信号电压值,ADC值为0时进行记录,再次为0就相当于经过了半个周期。计算两次ADC为0的时间差,就可以计算出信号的频率,这种方法不会受限于信号幅度大小。原理也比较简单,相关程序我也正在写,等测试没问题后我再发出来和大家分享!
————————————————
版权声明:本文为CSDN博主「Mr Justin」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_43368814/java/article/details/103439564


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 10年+ .NET Coder 心语,封装的思维:从隐藏、稳定开始理解其本质意义
· .NET Core 中如何实现缓存的预热?
· 从 HTTP 原因短语缺失研究 HTTP/2 和 HTTP/3 的设计差异
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· 阿里巴巴 QwQ-32B真的超越了 DeepSeek R-1吗?
· 【译】Visual Studio 中新的强大生产力特性
· 10年+ .NET Coder 心语 ── 封装的思维:从隐藏、稳定开始理解其本质意义
· 【设计模式】告别冗长if-else语句:使用策略模式优化代码结构
· 字符编码:从基础到乱码解决