Win32线程安全问题.同步函数
线程安全问题.同步函数
一丶简介什么是线程安全
通过上面几讲.我们知道了线程怎么创建.线程切换的原理(CONTEXT结构) 每个线程在切换的时候都有自己的堆栈.
但是这样会有安全问题. 为什么? 我们每个线程都使用自己的局部变量这个是没有安全问题的. 但是线程可能会使用全局变量.这样很有可能会产生安全问题.为什么是很有可能.
1.有全局变量的情况下.有可能会有安全问题.
2.对全局变量进行写操作.则一定有安全问题.
上面两个条件都具备,线程才是不安全的.
为什么是不安全的.
试想一下. 如果这个全局变量在更改.另一个线程也更改了.最后则会出现两个线程同时更改这个全局变量. 问题就会出现在这.
例如以下代码:
// 临界区同步函数.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <Windows.h> DWORD g_Number = 10; DWORD WINAPI MyThreadFun1(LPVOID lParame) { while (g_Number > 0) { printf("+++剩下Number个数 = %d\r\n", g_Number); g_Number--; printf("+++当前的Number个数 = %d\r\n", g_Number); } return 0; } DWORD WINAPI MyThreadFun2(LPVOID lParame) { while (g_Number > 0 ) { printf("***剩下Number个数 = %d\r\n", g_Number); g_Number--; //产生线程安全问题 printf("***当前的Number个数 = %d\r\n", g_Number); } return 0; } int main(int argc,char *argv[]) { HANDLE hThreadHand[2] = { NULL }; hThreadHand[0] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun1, NULL, 0, NULL); hThreadHand[1] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun2, NULL, 0, NULL); //创建两个线程 WaitForMultipleObjects(2, hThreadHand, TRUE, INFINITE); printf("Number个数 = %d \r\n", g_Number); system("pause"); return 0; }
上面的代码很简单. 看下运行结果
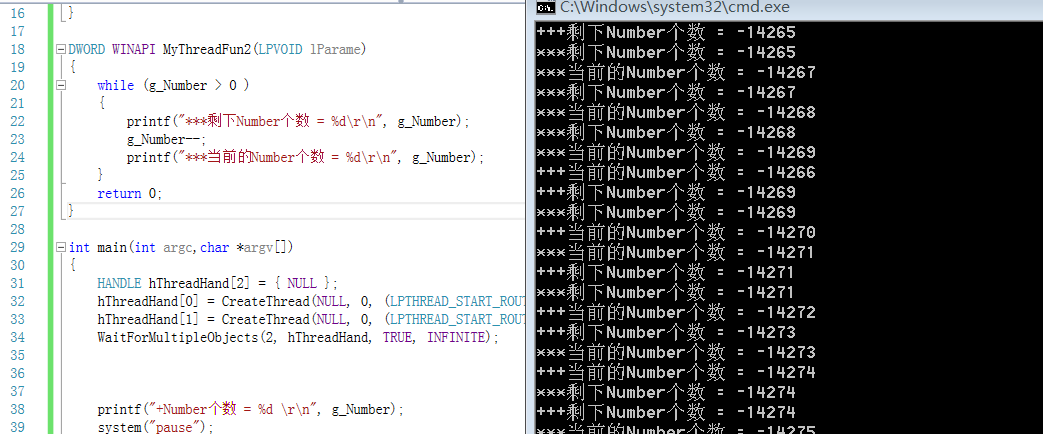
为什么会产生这个问题.原因是.在线程中我们有个地方
while(全局变量 > 0) 则会执行下边代码. 但是很有可能执行完这一句. 线程发生了切换. 去执行另一个线程去了. 最终会产生这样的结果.
如果看反汇编.则会发现 全局变量--的地方.汇编代码 并不是一局. 如果发生线程切换则会出现错误.

首先获取全局变量的值.
然后sub -1
最后重新赋值.
很有可能在sun eax 1的时候就发生了切换. 这样就有安全问题了.为了解决这些问题.我们必须想办法. 所以Windows提供了一组线程同步的函数.
二丶线程同步函数之临界区
什么时候临界区. 临界区的意思就是 这一个区域我给你锁定.当前有且只能有一个线程来执行我们临界区的代码.
而临界资源是一个全局变量
临界区的使用步骤.
1.创建全局原子变量.
2.初始化全原子变量
3.进入临界区
4.释放临界区.
5.删除临界区.
具体API:
1.全局原子变量
CRITICAL_SECTION g_cs; //直接创建即可.不用关心内部实现.
2.初始化全局原子变量.InitializeCriticalSection
_Maybe_raises_SEH_exception_ VOID InitializeCriticalSection(
LPCRITICAL_SECTION lpCriticalSection //传入全局原子变量的地址
);
3.使用的API 进入临界区.
void EnterCriticalSection( LPCRITICAL_SECTION lpCriticalSection //全局原子变量 );
下面还有一个. 是尝试无阻塞模式进入临界区. 意思就是内部加了一个判断.是否死锁了.
BOOL TryEnterCriticalSection( 返回吃持有的临界区对象.如果成功的情况下.
LPCRITICAL_SECTION lpCriticalSection
);
4.使用API 释放临界区.
void LeaveCriticalSection( LPCRITICAL_SECTION lpCriticalSection //全局原子对象 );
5.删除临界区对象.
void DeleteCriticalSection( LPCRITICAL_SECTION lpCriticalSection );
代码例子:
// 临界区同步函数.cpp : 定义控制台应用程序的入口点。 // #include "stdafx.h" #include <Windows.h> //创建临界区结构 CRITICAL_SECTION g_cs; DWORD g_Number = 10; DWORD WINAPI MyThreadFun1(LPVOID lParame) { EnterCriticalSection(&g_cs); //进入临界区 while (g_Number > 0) { printf("+++剩下Number个数 = %d\r\n", g_Number); g_Number--; printf("+++当前的Number个数 = %d\r\n", g_Number); } LeaveCriticalSection(&g_cs); return 0; } DWORD WINAPI MyThreadFun2(LPVOID lParame) { EnterCriticalSection(&g_cs); //进入临界区 while (g_Number > 0 ) { printf("***剩下Number个数 = %d\r\n", g_Number); g_Number--; //while语句内就是临界区了.有且只能一个线程访问. printf("***当前的Number个数 = %d\r\n", g_Number); } LeaveCriticalSection(&g_cs); return 0; } int main(int argc,char *argv[]) { //初始化临界区全局原子变量 InitializeCriticalSectionAndSpinCount(&g_cs, 0x00000400); //InitializeCriticalSection(&g_cs); //初始化临界区.两个API都可以. HANDLE hThreadHand[2] = { NULL }; hThreadHand[0] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun1, NULL, 0, NULL); hThreadHand[1] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun2, NULL, 0, NULL); //创建两个线程 WaitForMultipleObjects(2, hThreadHand, TRUE, INFINITE); DeleteCriticalSection(&g_cs); //删除临界区. printf("+Number个数 = %d \r\n", g_Number); system("pause"); return 0; }
官方MSDN例子:
链接: https://docs.microsoft.com/zh-cn/windows/desktop/Sync/using-critical-section-objects
三丶线程同步之互斥体
1.临界区缺点.以及衍生出来的跨进程保护
上面讲了临界区. 但是我们的临界资源是一个全局变量.例如下图:

如果我们的临界资源是一个文件. 需要两个进程都要访问怎么办? 此时临界区已经不可以跨进程使用了.
2.跨进程控制.
跨进程控制就是指 不同进程中的多线程控制安全..比如A进程访问临界资源的时候. B进程不能访问. 因为临界区的 令牌.也就是我们说的全局原子变量.只能在应用层.
但是如果放到内核中就好办了. 如下图所示

A进程的线程从内核中获取互斥体. 为0 还是为1. B进程一样. 如果为 0 则可以进行访问临界资源. 访问的时候.互斥体则设置为1(也就是令牌设置为1)这样B进程就获取不到了.自然不能访问
临界区资源了.
3.互斥体操作API
既然明白了互斥体是一个内核层的原子操作.那么我们就可以使用API 进行操作了.
操作步骤.
1.创建互斥体. 信号量设置为有信号的状态 例如全局的原子变量现在是有信号.是可以进行访问的.
2.获取信号状态. 如果有信号则进入互斥体临界区执行代码.此时互斥体信号为无信号. 也就是说别的进程访问的时候.因为没有信号.执行不了代码.
3.释放互斥体. 信号状态为有信号. 此时别的进程信号已经有了.所以可以进行访问了.
具体API:
1.创建互斥体
HANDLE CreateMutexA(
LPSECURITY_ATTRIBUTES lpMutexAttributes, SD安全属性.句柄是否可以继承.每个内核对象API都拥有.
BOOL bInitialOwner, 初始的信号量状态. false为有信号. 获取令牌的时候可以获取到. True为无信号. 且如果为True互斥体对象为线程拥有者.
LPCSTR lpName 全局名字. 根据名字寻找互斥体.
);
2.获取令牌.
DWORD WaitForSingleObject(
HANDLE hHandle, 等待的内核对象
DWORD dwMilliseconds 等待的时间
);
调用此函数之后.信号为无信号.别的进程是进入不了互斥体临界区的.
3.释放互斥体
BOOL ReleaseMutex(
HANDLE hMutex
);
调用完比之后.互斥体为有信号.可以使用了.
代码例子:
两个工程代码是一样的.贴一份出来.
#include "stdafx.h" #include <Windows.h> //创建临界区结构 int main(int argc,char *argv[]) { //初始化临界区全局原子变量 HANDLE MutexHandle = CreateMutex(NULL, FALSE, TEXT("AAA")); //创建互斥体. 信号量为0. 有信号的状态.wait可以等待 WaitForSingleObject(MutexHandle,INFINITE); for (size_t i = 0; i < 10; i++) { Sleep(1000); printf("A进程访问临街资源中临街资源ID = %d \r\n", i); } ReleaseMutex(MutexHandle); return 0; }
先运行A进程在运行B进程. 则B进程处于卡死状态.

实现了同步. 除非A进程释放互斥体句柄使信号变为有信号.此时才可以访问B
官方代码例子:
#include <windows.h> #include <stdio.h> #define THREADCOUNT 2 HANDLE ghMutex; DWORD WINAPI WriteToDatabase( LPVOID ); int main( void ) { HANDLE aThread[THREADCOUNT]; DWORD ThreadID; int i; // Create a mutex with no initial owner ghMutex = CreateMutex( NULL, // default security attributes FALSE, // initially not owned 有信号 NULL); // unnamed mutex 不需要跨进程使用.所以不用名字 if (ghMutex == NULL) { printf("CreateMutex error: %d\n", GetLastError()); return 1; } // Create worker threads for( i=0; i < THREADCOUNT; i++ ) { aThread[i] = CreateThread( //创建 THREADCOUNT个线程 NULL, // default security attributes 0, // default stack size (LPTHREAD_START_ROUTINE) WriteToDatabase, NULL, // no thread function arguments 0, // default creation flags &ThreadID); // receive thread identifier if( aThread[i] == NULL ) { printf("CreateThread error: %d\n", GetLastError()); return 1; } } // Wait for all threads to terminate WaitForMultipleObjects(THREADCOUNT, aThread, TRUE, INFINITE); //等待线程执行完毕 // Close thread and mutex handles for( i=0; i < THREADCOUNT; i++ ) CloseHandle(aThread[i]); CloseHandle(ghMutex); return 0; } DWORD WINAPI WriteToDatabase( LPVOID lpParam ) { // lpParam not used in this example UNREFERENCED_PARAMETER(lpParam); DWORD dwCount=0, dwWaitResult; // Request ownership of mutex. while( dwCount < 20 ) { dwWaitResult = WaitForSingleObject( //线程内部等待互斥体.因为一开始为FALSE所以有信号.第一次执行线程的时候则会执行. ghMutex, // handle to mutex INFINITE); // no time-out interval switch (dwWaitResult) { // The thread got ownership of the mutex case WAIT_OBJECT_0: __try { // TODO: Write to the database printf("Thread %d writing to database...\n", GetCurrentThreadId()); dwCount++; } __finally { // Release ownership of the mutex object if (! ReleaseMutex(ghMutex)) //执行完毕.释放互斥体.信号量变为有信号. 其余线程等待的时候可以等到则可以继续执行线程代码 { // Handle error. } } break; // The thread got ownership of an abandoned mutex // The database is in an indeterminate state case WAIT_ABANDONED: return FALSE; } } return TRUE; }
四丶事件操作API
相应的管理线程同步操作的.还有事件.
具体API:
1.创建事件对象
HANDLE CreateEventA(
LPSECURITY_ATTRIBUTES lpEventAttributes, SD安全属性
BOOL bManualReset, 通知类型
BOOL bInitialState, 初始值有信号还是无信号.false无信号
LPCSTR lpName 全局名字
);
返回事件句柄
首先这个函数有点复杂. 主要是第二个跟第三个参数.
第三个参数我们很好理解. 有信号还是无信号. false为无信号. true为有信号. 这样Wait函数根据有无信号就可以进行线程是否执行了.
主要是第二个参数. 通知类型.这个比较复杂.
通知类型的意思就是指. 如果我们按照以前.我们使用了wait函数. 那么有信号会变为无信号.除非释放才会继续有信号执行.
而现在的通知类型如果为TRUE. 那么wait函数执行的时候.你有信号我不会自动变为无信号了.除非你手动自己更改.
如果通知类型为FALSE 那么则自动设置.有信号使用wait函数接受了.那么就变成无信号了.
2.设置信号状态
上面说了.如果为TRUE. 那么信号就不会自动设置了.那么需要我们手动设置.
具体API
设置为有信号状态
BOOL SetEvent(
HANDLE hEvent
);
那么相应的也有设置为无信号的状态
BOOL ResetEvent(
HANDLE hEvent
);
3.具体代码例子
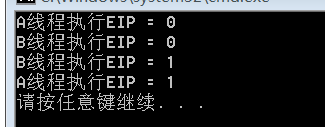
初始值为有信号状态. 通知类型为TRUE的情况下.
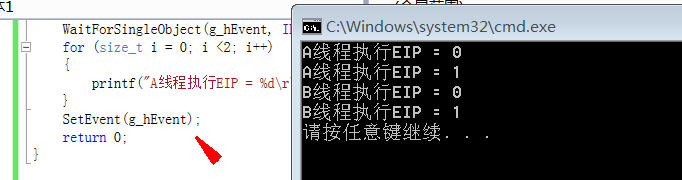
#include "stdafx.h" #include <Windows.h> HANDLE g_hEvent; DWORD WINAPI MyThreadFun1(LPVOID lparam) { WaitForSingleObject(g_hEvent, INFINITE);// 等待事件对象 for (size_t i = 0; i < 2; i++) { printf("A线程执行EIP = %d\r\n", i); } return 0; } DWORD WINAPI MyThreadFun2(LPVOID lparam) { WaitForSingleObject(g_hEvent, INFINITE);// 等待事件对象 for (size_t i = 0; i < 2; i++) { printf("B线程执行EIP = %d\r\n", i); } return 0; } int main(int argc, char *argv[]) { g_hEvent = CreateEvent(NULL, TRUE, TRUE, NULL); //通知类型为TRUE,则wait函数不手动将信号设置为无信号. HANDLE hThread[2] = { NULL }; hThread[0] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun1, 0, 0, NULL); hThread[1] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun2, 0, 0, NULL); WaitForMultipleObjects(2, hThread, TRUE, INFINITE); CloseHandle(hThread[0]); CloseHandle(hThread[1]); CloseHandle(g_hEvent); system("pause"); return 0; }
根据上面代码我们设置的通知类型为TRUE. 那么则AB线程都会执行. 因为wait函数不会将信号设置为无信号了.
结果演示.
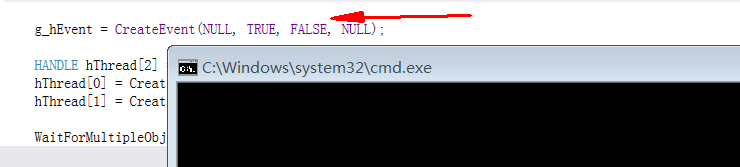
但是如果我们设置为信号状态为无信号的情况下.
也就是将上面的创建事件的代码. 的第三个参数设置为FALSE
启动后线程都会被阻塞.
那么如果我们设置通知类型为FALSE .且信号类型是有信号的情况下.
看看其执行结果
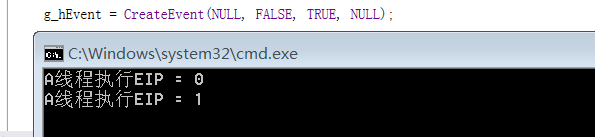
可以看到只会执行线程A. 因为通知类型我们改为FALSE. 那么wait函数则会自动设置信号状态了. 也就是说我们创建的事件一开始是有信号的.
首先执行线程A. 线程A 里面的wait函数等待到了有信号. 那么就会执行代码了. 此时信号状态已经设置为无信号了. 所以线程B就会阻塞到wait函数哪里.
如果此时我们想执行完A之后再执行B. 那么可以使用 SetEvent设置信号为有信号.
如果我们用于编程的话.大部分通知类型会改成FALSE. 让它自动设置信号状态为无信号. 我们可以使用API SetEvent设置有信号.
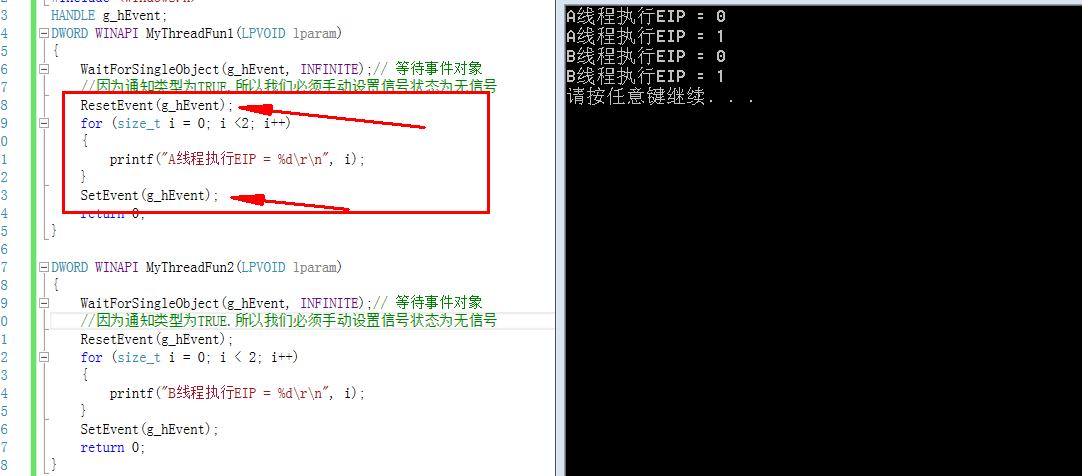
这样编程比较简单. 如果设置通知类型为TRUE. 那么我们就要使用 ResetEvent 跟SetEvent配合了.
如以下图片所示代码:
g_hEvent = CreateEvent(NULL, TRUE, TRUE, NULL); 不截图了.通知类型改为TRUE. 手动设置通知类型.
五丶 预留位.信号量的预留
六丶互斥本质跟同步本质
什么是互斥.什么是同步. 上面我们说了很多线程同步函数.那么是否是真的同步了.不见得. 了解了互斥跟同步的本质.才能更好的编写同步代码.
1.什么是互斥.什么是同步?
互斥: 互斥就是指一块资源.当前访问的时候有且只有一个线程访问. 比如A访问的时候 B会阻塞.访问不了.
同步: 同步的意思就是让线程执行顺序是有序的.因为互斥可以保证A访问的时候B访问不了.但有可能A会访问多次.线程无序.此时同步的意思就是 我就想让A执行完在执行B.
这个就是同步.
经典互斥例子.可以以这个例子讲解同步跟互斥.
如下代码:
#include "stdafx.h" #include <Windows.h> HANDLE g_hMutex; DWORD g_Money; DWORD g_MAX = 10; DWORD WINAPI MyThreadFun1(LPVOID lparam) { WaitForSingleObject(g_hMutex, INFINITE);// 等待事件对象 for (size_t i = 0; i < g_MAX; i++) { g_Money = 1; //消费者修改金钱 DWORD dwTid = GetCurrentThreadId(); printf("线程%d 生产者执行收钱动作.当前金钱 = %d\r\n", dwTid,g_Money); ReleaseMutex(g_hMutex); } return 0; } DWORD WINAPI MyThreadFun2(LPVOID lparam) { WaitForSingleObject(g_hMutex, INFINITE);// 等待事件对象 //因为通知类型为TRUE.所以我们必须手动设置信号状态为无信号 for (size_t i = 0; i < g_MAX; i++) { g_Money = 0; //消费者修改金钱 DWORD dwTid = GetCurrentThreadId(); printf("线程%d 消费者执行花钱动作.当前金钱 = %d\r\n",dwTid, g_Money); ReleaseMutex(g_hMutex); } return 0; } int main(int argc, char *argv[]) { g_hMutex = CreateMutex(NULL, FALSE,NULL); //创建互斥体.信号为有信号 HANDLE hThread[2] = { NULL }; hThread[0] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun1, 0, 0, NULL); hThread[1] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun2, 0, 0, NULL); WaitForMultipleObjects(2, hThread, TRUE, INFINITE); CloseHandle(hThread[0]); CloseHandle(hThread[1]); CloseHandle(g_hMutex); system("pause"); return 0; }
一个线程修改为1.一个线程修改为0.那么按照正常逻辑.应该是生产一个.消费一个 .
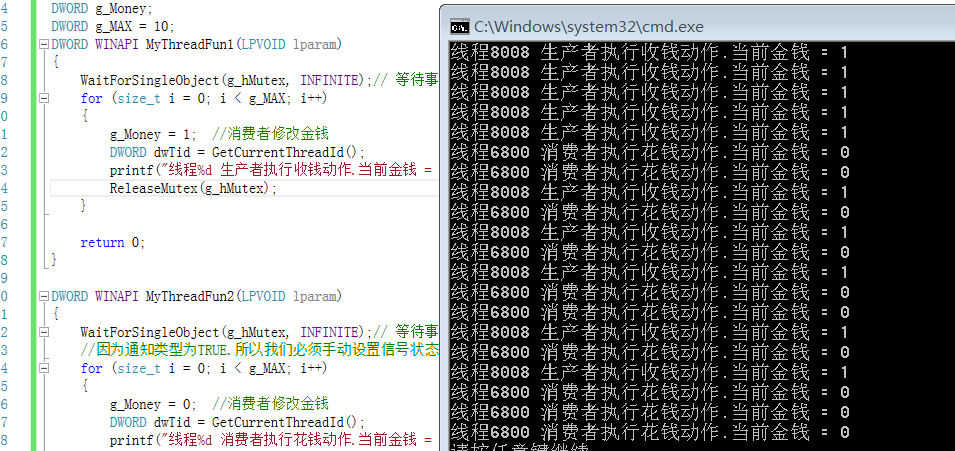
观看结果.结果是迥然不同的.
并不是生产一个.释放一个.
那如何变成 生产一个消费一个的这种模式那. 那么我们可以写一个简单的例子.判断我们的金钱来进行是否修改.
修改代码为如下代码.
#include "stdafx.h" #include <Windows.h> HANDLE g_hMutex; DWORD g_Money = 0; DWORD g_MAX = 10; DWORD g_IsChange; DWORD WINAPI MyThreadFun1(LPVOID lparam) { for (size_t i = 0; i < g_MAX; i++) { WaitForSingleObject(g_hMutex, INFINITE);// 等待事件对象 if (g_Money == 0) { g_Money = 1; //消费者修改金钱 DWORD dwTid = GetCurrentThreadId(); printf("线程%d 生产者执行收钱动作.当前金钱 = %d\r\n", dwTid, g_Money); } else { i--; //因为如果不想等.循环次数会浪费.所以-1次.不让它浪费. } ReleaseMutex(g_hMutex); } return 0; } DWORD WINAPI MyThreadFun2(LPVOID lparam) { //因为通知类型为TRUE.所以我们必须手动设置信号状态为无信号 for (size_t i = 0; i < g_MAX; i++) { WaitForSingleObject(g_hMutex, INFINITE);// 等待信号 if (g_Money == 1) { g_Money = 0; //消费者修改金钱 DWORD dwTid = GetCurrentThreadId(); printf("线程%d 消费者执行花钱动作.当前金钱 = %d\r\n", dwTid, g_Money); } else { i--; } ReleaseMutex(g_hMutex); } return 0; } int main(int argc, char *argv[]) { g_hMutex = CreateMutex(NULL, FALSE,NULL); HANDLE hThread[2] = { NULL }; hThread[0] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun1, 0, 0, NULL); hThread[1] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun2, 0, 0, NULL); WaitForMultipleObjects(2, hThread, TRUE, INFINITE); CloseHandle(hThread[0]); CloseHandle(hThread[1]); CloseHandle(g_hMutex); system("pause"); return 0; }
代码结果演示
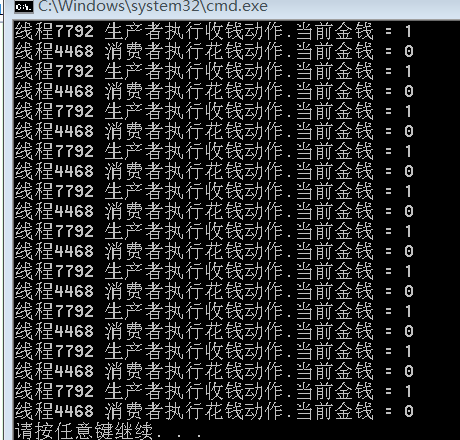
发现已经实现了同步.但是这样写是有问题的. 浪费了大量的时间.
因为当线程执行的时候.如果判断不是1则会继续循环.而没有释放信号. 而我们要实现的则是.如果没有.则给下一个线程继续执行.且保证有序.
所以上面的代码虽然实现了但是还是不能保证同步.会浪费线程的时间.
如果要实现同步.那么只能用事件来实现了. 所以说 同步函数各有优缺点.
实现同步的方法.
1.创建两个Event对象.一个有信号.一个无信号.且通知类型都是自动设置的.也就是参数2为FALSE.
2.当A线程执行完毕之后.使用SetEvent给B线程设置信号状态为有信号.这样B就会执行. B执行完之后给A设置.这样A就执行.相当于交错设置.不浪费时间片.
如下代码演示:
#include "stdafx.h" #include <Windows.h> HANDLE g_hEventOne; HANDLE g_hEventTwo; DWORD g_Money = 0; DWORD g_MAX = 10; DWORD g_IsChange; DWORD WINAPI MyThreadFun1(LPVOID lparam) { for (size_t i = 0; i < g_MAX; i++) { WaitForSingleObject(g_hEventOne, INFINITE);// 等待事件对象 g_Money = 1; //消费者修改金钱 DWORD dwTid = GetCurrentThreadId(); printf("线程%d 生产者执行收钱动作.当前金钱 = %d\r\n", dwTid, g_Money); SetEvent(g_hEventTwo); } return 0; } DWORD WINAPI MyThreadFun2(LPVOID lparam) { //因为通知类型为TRUE.所以我们必须手动设置信号状态为无信号 for (size_t i = 0; i < g_MAX; i++) { WaitForSingleObject(g_hEventTwo, INFINITE);// 等待事件对象 g_Money = 0; //消费者修改金钱 DWORD dwTid = GetCurrentThreadId(); printf("线程%d 消费者执行消费动作.当前金钱 = %d\r\n", dwTid, g_Money); SetEvent(g_hEventOne); } return 0; } int main(int argc, char *argv[]) { g_hEventOne = CreateEvent(NULL, FALSE, TRUE, NULL); //A线程设置为有信号则A线程先执行. g_hEventTwo = CreateEvent(NULL, FALSE, FALSE, NULL);//B线程设置为无信号.则B线程不会先执行.要等A线程通知才可以执行. HANDLE hThread[2] = { NULL }; hThread[0] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun1, 0, 0, NULL); hThread[1] = CreateThread(NULL, 0, (LPTHREAD_START_ROUTINE)MyThreadFun2, 0, 0, NULL); WaitForMultipleObjects(2, hThread, TRUE, INFINITE); CloseHandle(hThread[0]); CloseHandle(hThread[1]); CloseHandle(g_hEventOne); CloseHandle(g_hEventTwo); system("pause"); return 0; }
代码执行结果
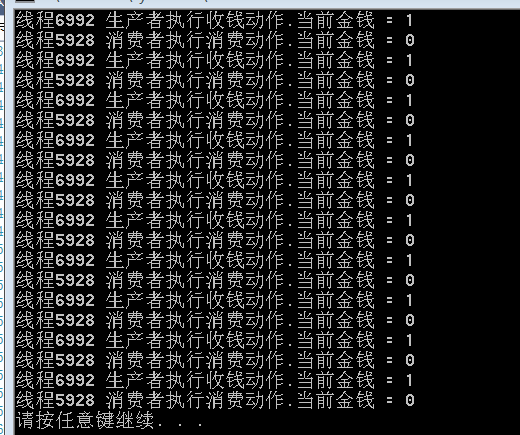
实现了同步有序
坚持两字,简单,轻便,但是真正的执行起来确实需要很长很长时间.当你把坚持两字当做你要走的路,那么你总会成功. 想学习,有问题请加群.群号:725864912(收费)群名称: 逆向学习小分队 群里有大量学习资源. 以及定期直播答疑.有一个良好的学习氛围. 涉及到外挂反外挂病毒 司法取证加解密 驱动过保护 VT 等技术,期待你的进入。
详情请点击链接查看置顶博客 https://www.cnblogs.com/iBinary/p/7572603.html
本文来自博客园,作者:iBinary,未经允许禁止转载 转载前可联系本人.对于爬虫人员来说如果发现保留起诉权力.https://www.cnblogs.com/iBinary/p/9574211.html
欢迎大家关注我的微信公众号.不定期的更新文章.更新技术. 关注公众号后请大家养成 不白嫖的习惯.欢迎大家赞赏. 也希望在看完公众号文章之后 不忘 点击 收藏 转发 以及点击在看功能. QQ群:
QQ群:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号