

一起学习Rviz(一)——显示简单立体模型
先甩个锅咯,手敲下来的难免有些小错误,错别字啥的,理解哈~~~
Ubuntu 14.04,ROS版本 indigo
1、Rviz显示简单立体模型
首先,创建工作空间。
创建文件夹,catkin_rviz 这个名字随便取
mkdir -p ~/catkin_rviz/src
然后进入,执行 make 指令:
cd ~/catkin_rviz
catkin_make
然后catkin_rviz/ 下面会多出一 build 和 devel 文件夹,src/ 下会生成一个 CMakeLists.txt 文件。
然后创建包,为了避免出现不必要的麻烦,这里采用跟官方文档一样的名字:
cd src
catkin_create_pkg using_markers roscpp visualization_msgs
然后src目录下又多了一个 using_markers 文件夹,好的,继续!!
创建using_markers/src下的代码文件:
cd using_markers/src
gedit basic_shapes.cpp
将代码copy进去,保存退出。
然后修改 using_markers 下的 cmakelists 文件:
cd ..
gedit CMakeLists.txt
在最后面添加新行:
add_executable(basic_shapes src/basic_shapes.cpp)
target_link_libraries(basic_shapes ${catkin_LIBRARIES})
保存退出。
回到工作空间顶层目录( catkin_rviz ):
cd ~/catkin_rviz
编译:
catkin_make
如果报错说找不到 src/basic_shapes.cpp 文件,先看看是否在src下有这么个东西,如果有,那么看看你是不是把前面两句指令错拷到别的cmakelists文件了。
编译结果是这样的:

然后新开一个窗口启动ROS:
roscore
然后我们回到原来的窗口,执行命令将ROS工作环境切换到工作空间 catkin_rviz :
source devel/setup.bash
然后才可以运行包:
rosrun using_markers basic_shapes
如果没有执行 source,它会这样:

如果没打开ROS,它会这样:

成功运行后,可能会弹出很多警告(忽略就好,,别问我为啥,教程上没说。。。):

然后新开一个窗口打开Rviz(确保已成功安装Rviz):
rosrun rviz rviz
将 Rviz 中的 Fixed Frame 设置为 my_frame,添加 Marker,topic为 /visualization_marker,不懂可以看一下这个,还是不懂,,那去看官网英文文档吧。。
然后就可以在右面看到不断变换的立方体了,贴张图: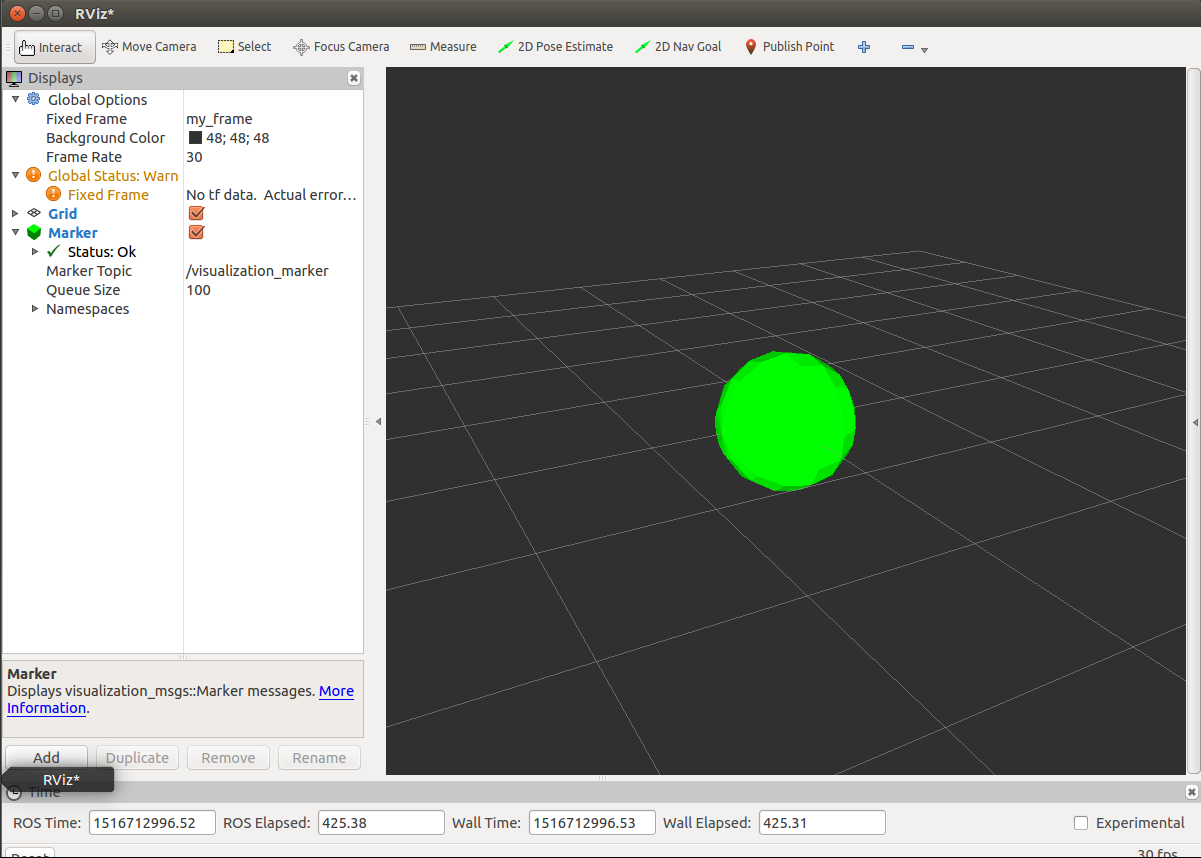
好吧,这次就到这里吧,,,由于看文档的时候没仔细看,建包的位置不对,搞了一晚上(看了一天英文文档头晕眼花的,,,,心疼自己0.333S—_)

【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步