ros-2
前奏
root@huirou:~# free -h
total used free shared buff/cache available
Mem: 5.8G 1.0G 3.1G 5.8M 1.7G 4.6G
Swap: 2.0G 0B 2.0G
root@huirou:~# fdisk -l | grep -w '/dev/sda'
Disk /dev/sda: 60 GiB, 64424509440 bytes, 125829120 sectors
root@huirou:~# hostname -I
192.168.1.102
# 修改固定IP
~# cp /etc/netplan/01-network-manager-all.yaml{,-`date +'%Y%m%d%H%M'`}
~# vim /etc/netplan/01-network-manager-all.yaml
network:
version: 2
renderer: NetworkManager
ethernets:
ens33:
addresses: [192.168.92.129/24]
gateway4: 192.168.92.2
dhcp4: false
optional: true
nameservers:
addresses: [192.168.92.2, 114.114.114.114]
# 重启网络服务使配置生效
~# sudo netplan apply
# 安装ssh
root@huirou:~# apt install -y openssh-server
root@huirou:~# systemctl start sshd
root@huirou:~# systemctl enable sshd
# 配置源
root@huirou:~# mv /etc/apt/sources.list{,-bak}
root@huirou:~# vi /etc/apt/sources.list
# 阿里源
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse
# 清华源
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
# 中科大源
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-security main restricted universe multiverse
deb-src https://mirrors.ustc.edu.cn/ubuntu/ bionic-proposed main restricted universe multiverse
root@huirou:~# sudo apt update
安装ROS
~# 是root用户
~$ 是普通用户
使用普通用户执行命令前必须在命令前sudo,使用root用户执行命令时则不用添加,如加上也可能执行
# 系统用户
muzhi用户密码: aaaaaa
root用户密码: aaaaaa
Ubuntu 16.04对应ROS的 Kinetic 版本
Ubuntu 18.04对应ROS的 Melodic 版本
XTDrone平台目前支持这两个发行版
# 添加ROS软件源
~# sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 添加密钥
~# sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 安装ROS
~# sudo apt update ===> 这步如不执行会出现下一步安装不成功!!!
==== 参考项 ==========
apt search ros-melodic # 搜索安装包
=====================
~# sudo apt install -y ros-melodic-desktop-full
# 设置环境变量(安装了多个版本则需要参考上述Ubuntu官方安装文档)
~# echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
~# source ~/.bashrc
# 安装依赖
~# sudo apt install -y python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
# 初始化rosdep
~# sudo apt install -y python-rosdep
~# sudo rosdep init
ERROR: Rosdep experienced an error: ('The read operation timed out',)
Please go to the rosdep page [1] and file a bug report with the stack trace below.
[1] : http://www.ros.org/wiki/rosdep
rosdep version: 0.21.0
Traceback (most recent call last):
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 146, in rosdep_main
exit_code = _rosdep_main(args)
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 441, in _rosdep_main
return _no_args_handler(command, parser, options, args)
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 450, in _no_args_handler
return command_handlers[command](options)
File "/usr/lib/python2.7/dist-packages/rosdep2/main.py", line 594, in command_init
data = download_default_sources_list()
File "/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py", line 340, in download_default_sources_list
f = urlopen(url, timeout=DOWNLOAD_TIMEOUT)
File "/usr/lib/python2.7/urllib2.py", line 154, in urlopen
return opener.open(url, data, timeout)
File "/usr/lib/python2.7/urllib2.py", line 429, in open
response = self._open(req, data)
File "/usr/lib/python2.7/urllib2.py", line 447, in _open
'_open', req)
File "/usr/lib/python2.7/urllib2.py", line 407, in _call_chain
result = func(*args)
File "/usr/lib/python2.7/urllib2.py", line 1248, in https_open
context=self._context)
File "/usr/lib/python2.7/urllib2.py", line 1208, in do_open
r = h.getresponse(buffering=True)
File "/usr/lib/python2.7/httplib.py", line 1178, in getresponse
response.begin()
File "/usr/lib/python2.7/httplib.py", line 452, in begin
version, status, reason = self._read_status()
File "/usr/lib/python2.7/httplib.py", line 408, in _read_status
line = self.fp.readline(_MAXLINE + 1)
File "/usr/lib/python2.7/socket.py", line 480, in readline
data = self._sock.recv(self._rbufsize)
File "/usr/lib/python2.7/ssl.py", line 754, in recv
return self.read(buflen)
File "/usr/lib/python2.7/ssl.py", line 641, in read
v = self._sslobj.read(len)
SSLError: ('The read operation timed out',)
解决:
接下来就是克隆项目,克隆项目前需要将ubuntu的公钥传到github上,现在github打不开
~# ssh-keygen -t rsa -P '' ===> 一路回车
~# cat ~/.ssh/id_rsa.pub ===> 查看公钥
注: 将公钥复制到github即可
~# apt install -y git
~# git clone --depth=1 https://github.com/ros/rosdistro.git
~# mkdir -p /etc/ros/rosdep/sources.list.d/
~# cp rosdistro/rosdep/sources.list.d/20-default.list /etc/ros/rosdep/sources.list.d/
~# mv /etc/ros/rosdep/sources.list.d/20-default.list{,-bak}
~# vim /etc/ros/rosdep/sources.list.d/20-default.list ====> 该条是命令,往下是20-default.list这个文件中的内容
# os-specific listings first
yaml file:///root/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///root/rosdistro/rosdep/base.yaml
yaml file:///root/rosdistro/rosdep/python.yaml
yaml file:///root/rosdistro/rosdep/ruby.yaml
gbpdistro file:///root/rosdistro/releases/fuerte.yaml fuerte
~# cp /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py{,-bak}
~# vim /usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
FUERTE_GBPDISTRO_URL = 'file:///root/rosdistro/releases/fuerte.yaml'
~# cp /usr/lib/python2.7/dist-packages/rosdep2/rep3.py{,-bak}
~# vim /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
REP3_TARGETS_URL = 'file:///root/rosdistro/releases/targets.yaml'
~# cp /usr/lib/python2.7/dist-packages/rosdistro/__init__.py{,-bak}
~# vim /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
DEFAULT_INDEX_URL = 'file:///root/rosdistro/index-v4.yaml'
#更新本地 rosdep 数据库
~# sudo rosdep fix-permissions
~# rosdep update
注: 这里要根据自己的网速而定,我重复执行了20来次才正常
# 查看ros版本
~# rosversion -d
melodic ===> 本次安装的是melodic版本
运行小海龟示例
~# roscore ===> 在图形化界面中运行该命令,运行后该不要关闭该窗口
# 再在图形化界面中使用root用户新开一个窗口(第二个窗口)
用途: turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信
语法:rosrun [package_name] [node_name]
实操
~# rosrun turtlesim turtlesim_node
~/rosdistro# rosnode list
返回如下信息:
/rosout
/turtlesim
# rqt_graph命令来显示当前运行的节点和话题(可选项)
~# rqt_graph
# 再在图形化界面中使用root用户再新开一个窗口(第三个窗口)
用途:turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim则订阅该话题以接收该消息
语法:rosrun [package_name] turtle_teleop_key
实操
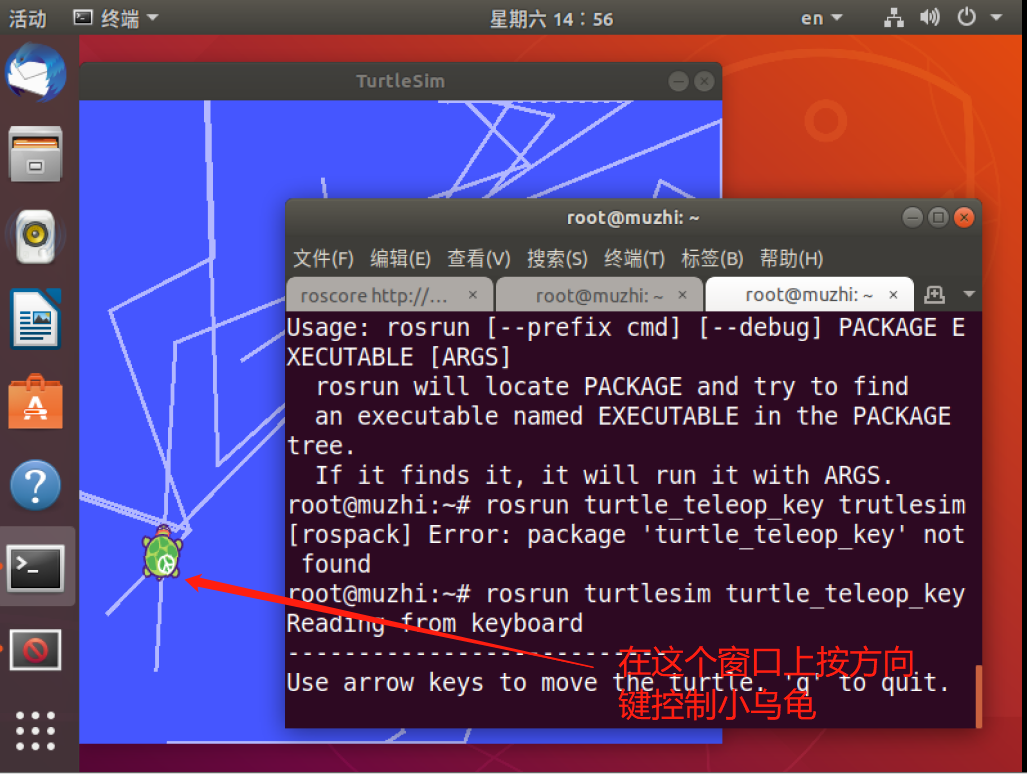
~# rosrun turtlesim turtle_teleop_key
注:执行该命令时不能在小乌龟全屏下执行,也不能在终端全屏下执行,专业用语叫 "光标处于激活状态",
也就是既能显示终端也能看到小乌龟界面,这2个画面都能看到时 在终端中(非小乌龟界面)
通过方向键即可控制小海龟的移动,如下图所示
安装Gazebo并与ROS连接
以下操作需要在上述都完成后进行
上面安装ros时是安装的 ros-melodic-desktop-full 版本,ros-melodic-desktop-full因为安装的是全版本(包含Gazebo),所以这里安装Gazebo时要
root@muzhi:~# apt list|grep gazebo-*
root@muzhi:~# apt install -y gazebo9 libgazebo9-dev
# Gazebo与ROS连接
(1) 安装ROS-Gazebo接口
root@muzhi:~# sudo apt install -y ros-melodic-gazebo-ros-pkgs ros-melodic-gazebo-msgs ros-melodic-gazebo-plugins ros-melodic-gazebo-ros-control
(2) 验证是否连接成功
# 图形化界面上新打开第一个窗口输入:
# root@muzhi:~# roscore
图形化界面上新打开第二个窗口输入:
root@muzhi:~# vim ~/.ignition/fuel/config.yaml
把 api.ignitionfuel.org 改成 fuel.ignitionrobotics.org,而后再运行
root@muzhi:~# rosrun gazebo_ros gazebo
报错:
VMware: vmw_ioctl_command error 无效的参数.
Aborted (core dumped)
解决:
右击虚拟机===设置===显示器===去掉3D加速
root@muzhi:~# rosrun gazebo_ros gazebo
再一次报错
VMware: vmw_ioctl_command error 无效的参数.
Aborted (core dumped)
# 解决
https://blog.csdn.net/weixin_43059285/article/details/108012524
~# echo "export SVGA_VGPU10=0" >> ~/.bashrc
~# source ~/.bashrc
~# rosrun gazebo_ros gazebo
如果在上一步骤发现Gazebo打开后长时间停留在启动界面,且显示黑屏(有网格),关掉Gazebo,并依次执行以下语句
~# mkdir -p ~/.gazebo/models && cd ~/.gazebo/models/
~/.gazebo/models# wget http://file.ncnynl.com/ros/gazebo_models.txt
~/.gazebo/models# wget -i gazebo_models.txt
~/.gazebo/models# ls model.tar.g* | xargs -n1 tar xzvf
~/.gazebo/models# killall gzserver
~/.gazebo/models# killall gzclient
~/.gazebo/models# which gzserver gzclient ===> 查看服务端和客户端的位置
# 再来执行该命令
~/.gazebo/models# rosrun gazebo_ros gazebo
# 如果Gazebo打开界面如下图所示,且可看到终端显示下面代码块中的内容,则说明Gazebo与ROS连接成功!
~/.gazebo/models# rostopic list
/clock
/gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
# 退出到家目录
~/.gazebo/models# cd
# 常用命令
~# rostopic list
~# rosnode list
~# rostopic echo <主题> ===> 主题从上条命令中获取
~# rostopic info <主题>

 浙公网安备 33010602011771号
浙公网安备 33010602011771号