
A4988步进电机驱动模块介绍
2019-12-19 11:18 华乙子 阅读(15420) 评论(0) 编辑 收藏 举报1.介绍
(1)绕组
常用的步进电机有四根线,1A 1B 2A 2B,1A和1B是一个绕组,2A和2B是一个绕组,用万用表测试1A和1B之间是短路的,2A和2B之间是短路的,1A和1B,2A和2B是等效的。
通常状况下,步进电机可以自由转动(用手可以拧动),1A和1B接在一起的时候,用手拧会感到明显阻力,1A和1B,2A和2B分别接在一起,则阻力更大。
(2)步距角
所谓步进电机,就是可以一步一步进动的电机,每一步旋转的角度就是步距角。常用电机步距角1.8°的较多,也就是每次步进1.8°,旋转一圈需要200步,也说这个步进电机的分辨率是200步。
(3)细分
细分的意义就是提高步进电机分辨率,如果没有细分的话,步进电机每次步进的角度就是步距角,比如1.8°,有了细分,比如16细分,就是把1.8°平均分16份,那么电机的分辨率就变成200*16=3200步了,也就是旋转一圈需要3200步。
(4)电流
电流越大,电机扭矩越大。
(1)ENABLE,
使能,接低电平则模块开始工作,接高电平则模块关机。
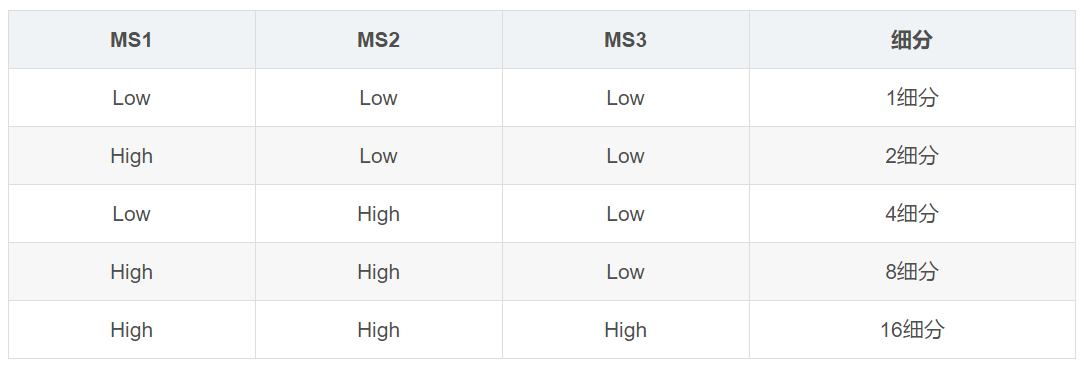
(2)MS1,MS2,MS3
细分设置,通过这三个脚的高低电平设置细分,1,2,4,8,16这5种细分,具体见表:
(3)RESET
重置,通常悬空。
SLEEP
睡眠,接低电平则电机断电,用手拧可以自由转动,接高电平则电机上电,用手拧不动。
(4)STEP
脉冲输入,往这个脚输入一个方波,电机转动一步,也就是(1.8/16)°(以1.8°电机,16细分为例),往这个脚持续输入方波,则电机持续转动。
(5)DIR
方向控制,低电平正转,高电平反转。
(6)GND
地线,两个GND都是一样的,要连在一起接到地线。
(7)VDD
数字电源,数字电路部分的电源,3.3V或5V,如果这里是3.3V,那么之前说的高电平就是3.3V,低电平就是0V,如果这里是5V,那么之前说的高电平都是5V,低电平是0V。
(8)1A 1B 2A 2B
接电机的1A 1B 2A 2B。
(9)VMOT
功率电源,8-35V,给电机转动提供能源,因此需要较高的电压并有能力输出大的电流。
5.步进电机驱动方式
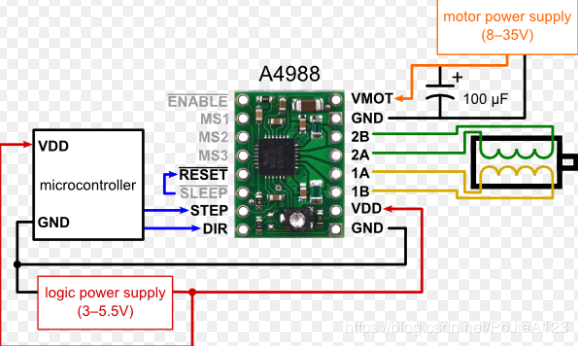
(1)供电
VMOT接8-35V的功率电源,VDD接3.3V或5V,GND接地,步进电机的4条线插在A4988对应的地方。
(2)设置细分
根据表设置步进细分,细分越高步进分辨率越高。
(3)Stm32发生方波
最简单的方法,类似于让一个Led闪烁,拉高,延时,拉低,延时,循环。
(4)控制方向和速度
通过DIR脚控制方向。控制速度其实就是控制脉冲频率,也就是控制拉高拉低之间的延迟时间。
每一个脉冲电机旋转一步,单位时间给出的脉冲数越多,单位时间旋转的角度就越大,所以速度越快。
(5)调节电流
A4988模块上有一个电位器,拧它可以调节电流。

【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步