手把手带你做LiteOS的树莓派移植
摘要:树莓派是英国的慈善组织“Raspberry Pi 基金会”开发的一款基于arm的微型电脑主板。本文介绍基于LiteOS的树莓派移植过程。
本文分享自华为云社区《2021 LiteOS树莓派移植指南(一)》,作者: Lionlace 。
树莓派是英国的慈善组织“Raspberry Pi 基金会”开发的一款基于arm的微型电脑主板。本文介绍基于LiteOS的树莓派移植过程。
硬件信息
开发板:Raspberry Pi 2 Model B(树莓派2B)
CPU:Broadcom BCM2836
主频:900MHz
内存:1GB
GPU:VideoCore IV GPU
移植准备
硬件环境
本实验使用了Raspberry Pi 2 Model B开发板、USB转TTL模块、SDcard和读卡器。
软件环境
- 本实验需要先按照码云上的LiteOS教程搭建好linux环境(make、arm-none-eabi编译工具链)。环境搭建教程:https://gitee.com/LiteOS/LiteOS/blob/master/doc/LiteOS_Build_and_IDE.md
- 本实验需要下载官方的镜像制作工具(Raspberry Pi Imager),下载地址:https://www.raspberrypi.org/software/
移植步骤
创建目录结构
在targets目录下新增Raspberry_Pi2B目录,参考与cortex-A7架构差异较小的realview-pbx-a9的启动流程进行移植。
- 将realview-pbx-a9目录下的reset_vector.S和main.c拷贝到Raspberry_Pi2B目录下并将reset_vector.S重命名为los_startup_gcc.S。
- 将realview-pbx-a9目录下的board.ld和liteos.ld中内容合并到Raspberry_Pi2B目录下liteos.ld文件中。
- 拷贝realview-pbx-a9目录下include、os_adapt文件夹到Raspberry_Pi2B目录下,并删除不需要的dma相关头文件include/asm/dma.h。
关闭SMP和MMU
在los_startup_gcc.S文件中增加关闭SMP和MMU的代码。
- 关闭SMP功能
mrc p15, 0, r0, c1, c0, 1 bic r0, r0, #0x40 mcr p15, 0, r0, c1, c0, 1

上表是ACTLR(Auxiliary Control Register)寄存器bit6功能描述信息,了解更多寄存器相关信息可以参考Cortex-A7 MPCore Technical Reference Manual。
- 关闭MMU的功能
mrc p15, #0, r0, c1, c0, #0 bic r0, r0, #1 mcr p15, #0, r0, c1, c0, #0 @ clear mmu bit

上表是SCTLR (System Control Register)寄存器bit0功能描述信息,了解更多寄存器相关信息可以参考Cortex-A7MPCore Technical Reference Manual。
- 删除调用SMP相关函数
删除los_startup_gcc.S中的enable_scu和secondary_cpu_start。
使能FPU/ENON
配置FPU/NEON:
/* enable fpu+neon */ LDR r0, =(0xF << 20) MCR p15, 0, r0, c1, c0, 2 MOV r3, #0x40000000 VMSR FPEXC, r3
以上前两行代码用于设置CP10和CP11的访问权限,后两行用于设置寄存器FPEXC的EN位来使能FPU。
注:在arm的协处理器设计中,最多可以支持16个协处理器,通常被命名为cp0~cp15。
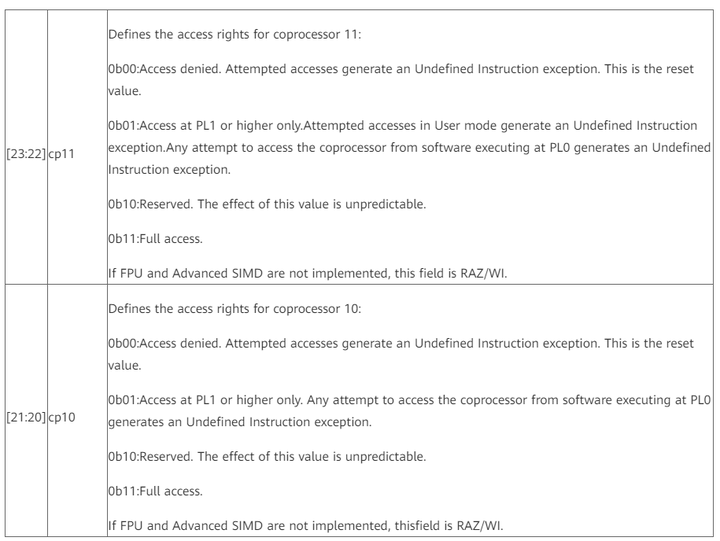
上表为寄存器CPACR bit20-23功能描述信息,了解更多寄存器相关信息可以参考Cortex-A7 MPCore Technical Reference Manual。
修改链接脚本
树莓派启动时首先加载SD卡中的start.elf文件,该程序会读取SD卡中的config.txt文件内容,该文件记录了一些配置信息。如果没有设置启动地址和启动文件,则默认会加载kernel8.img文件,该文件是aarch64编译的程序,启动地址为0x80000。如果SD卡中无kernel8.img镜像文件,则会加载kernel7.img镜像文件,该文件是32位编译器编译的程序,启动地址为0x8000。树莓派2B的cpu是32位架构,因此设置liteos.ld文件中启动地址为0x8000。
栈初始化
树莓派2B启动文件los_startup_gcc.S中只设置了SVC模式的sp寄存器,新增cpuInit函数来初始化其他模式的sp指针。如下所示:
VOID cpuInit(VOID) { __asm__ ( "msr cpsr_c, %1\n\t" "mov sp, %0\n\t" "msr cpsr_c, %3\n\t" "mov sp, %2\n\t" "msr cpsr_c, %5\n\t" "mov sp, %4\n\t" "msr cpsr_c, %7\n\t" "mov sp, %6\n\t" "msr cpsr_c, %8\n\t" : : "r" (__irq_stack_top), "I" (PSR_F_BIT | PSR_I_BIT | CPSR_IRQ_MODE), "r" (__abt_stack_top), "I" (PSR_F_BIT | PSR_I_BIT | CPSR_ABT_MODE), "r" (__undef_stack_top), "I" (PSR_F_BIT | PSR_I_BIT | CPSR_UNDEF_MODE), "r" (__fiq_stack_top), "I" (PSR_F_BIT | PSR_I_BIT | CPSR_FIQ_MODE), "I" (PSR_F_BIT | PSR_I_BIT | CPSR_SVC_MODE) : "r14"); }
配置动态内存地址
#define OS_SYS_MEM_ADDR ((void *)(&__bss_end)) #define LOS_HEAP_ADDR_END (void*)(0x0 + 4 * 1024 * 1024) #define OS_SYS_MEM_SIZE (UINT32)(((UINT32)LOS_HEAP_ADDR_END - (UINT32)OS_SYS_MEM_ADDR + (64 - 1)) & ~(64 - 1))
以上代码定义OS_SYS_MEM_ADDR为动态内存起始地址,LOS_HEAP_ADDR_END为动态内存结束地址,OS_SYS_MEM_SIZE为动态内存大小。
串口实现
树莓派2B原理图引出了mini_uart串口TXD0、RXD0,对应的引脚为GPIO14、GPIO15,如下图所示:
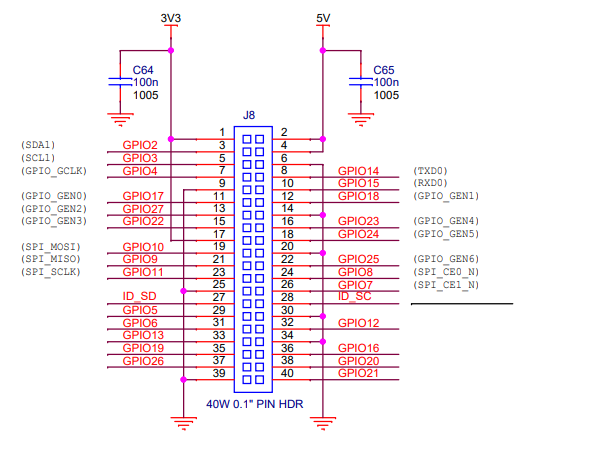
创建usart.c和usart.h文件,在usart.c中编写串口初始化函数UartInit,并实现uart_debug.c文件中uart_getc、uart_hwiCreate、uart_write接口,实现printf函数从串口输出。
适配中断
树莓派2B的中断属于bcm特定的中断控制器。在drivers/interrupt目录下新增arm_control.c文件,并在该文件中实现HwiControllerOps结构体内的回调函数。
STATIC const HwiControllerOps g_armControlOps = { .enableIrq = HalIrqUnmask, .disableIrq = HalIrqMask, .getCurIrqNum = HalCurIrqGet, .getIrqVersion = HalIrqVersion, .getHandleForm = HalIrqGetHandleForm, .handleIrq = IrqEntryArmControl, .clearIrq = HalIrqClear, .triggerIrq = HalIrqPending, };

以上表格是interrupt寄存器偏移地址,读者想了解详细寄存器相关信息请参考官方芯片手册。
适配systick
树莓派2B通过Timer(arm side)来触发systick中断。具体操作细节请参考文件:drivers\timer\rasp_systick.c。
/* systime=250000000 */ timer->preDivider = (OS_SYS_CLOCK / OS_SYS_US_PER_SECOND - 1); timer->reload = 0; timer->load = 0; timer->IRQClear = 0; timer->control = 0; timer->reload = LOSCFG_BASE_CORE_TICK_PER_SECOND; timer->load = LOSCFG_BASE_CORE_TICK_PER_SECOND; /* 23-bit counter, enable interrupt, enable timer */ timer->control = (1 << 1) | (1 << 5) | (1 << 7); UINT32 ret = LOS_HwiEnable(ARM_TIMER_INI);
以上代码配置定时器Timer为每1ms触发一次systick中断。

以上是Timer寄存器偏移地址,读者想了解详细寄存器相关信息请参考官方芯片手册。
配置编译
在targets目录下新增kconfig.raspberry文件:
ConfigLOSCFG_PLATFORM config LOSCFG_PLATFORM string default "Raspberry_Pi2B" if LOSCFG_PLATFORM_Raspberry_Pi2B choice prompt "Board" depends on LOSCFG_FAMILY_RASPBERRY default LOSCFG_PLATFORM_Raspberry_Pi2B help Raspberry_Pi2B config LOSCFG_PLATFORM_Raspberry_Pi2B bool "Raspberry_Pi2B" select LOSCFG_ARCH_CORTEX_A7 select LOSCFG_USING_BOARD_LD select LOSCFG_PLATFORM_ARM_CONTROL select LOSCFG_Raspberry_Pi2B_SYSTICK endchoice
修改Makefile文件
分别修改以下路径Makefile(详情请参考gitee仓库对应文件):driver/timer/Makefiledriver/interrupt/Makefiletargets/Raspberry_Pi2B/Makefile
添加.img生成指令
在根目录下Makefile中添加指令$(OBJCOPY) -O binary $(OUT)/$@.elf $(OUT)/kernel7.img,用来将生成的elf文件转换生成kernel7.img文件。
制作启动SDcard
- 使用Raspberry Pi Imager工具制作Raspberry Pi系统。
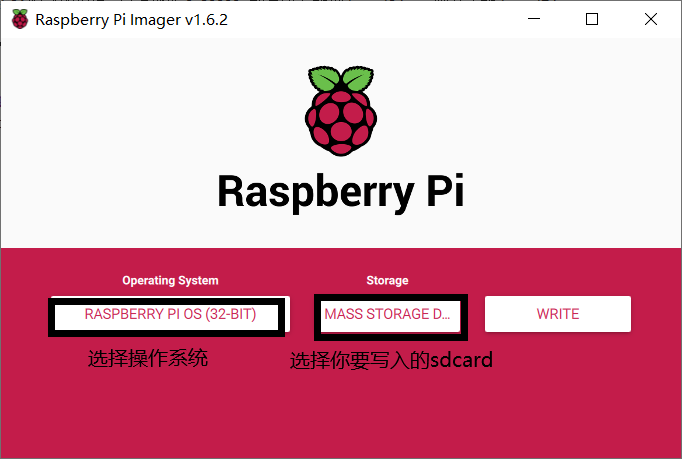
Raspberry Pi Imager 下载链接:https://www.raspberrypi.org/software/
- 将编译生成的kernel7.img文件替换掉SDcard中kernel7.img文件。
- 将写入镜像文件的SDcard插入树莓派2B中并上电,树莓派2B即可运行LiteOS系统。运行结果如下:
********Hello Huawei LiteOS******** LiteOS Kernel Version : 5.1.0 build data : Jul 13 2021 16:40:42 ********************************** OsAppInit cpu 0 entering scheduler app init! Hello, welcome to liteos demo! Huawei LiteOS #
至此,LiteOS系统成功启动和运行。该移植工程已经在Gitee LiteOS社区上线,相关代码链接地址为:https://gitee.com/LiteOS/LiteOS/tree/master/targets/Raspberry_Pi2B
参考文献链接
[1] Raspberry Pihardware - Raspberry Pi Documentation:https://www.raspberrypi.org/documentation/hardware/raspberrypi/README.md
[2] 树莓派官方芯片手册:
https://datasheets.raspberrypi.org/bcm2835/bcm2835-peripherals.pdf
[3] Cortex-A7 MPCore Technical Reference Manual:
https://developer.arm.com/documentation/ddi0464/f?lang=en
