小熊派开发实践丨小熊派+合宙Cat.1接入云服务器
摘要:使用小熊派开发板,以合宙的AIR724为通信模组(Cat.1),以AT指令方式,通过mqtt协议接入云服务器。
本贴使用小熊派开发板+合宙的Air724(Cat.1模组),接入自己搭建的EMQ服务器
一、实验准备
1.实验环境
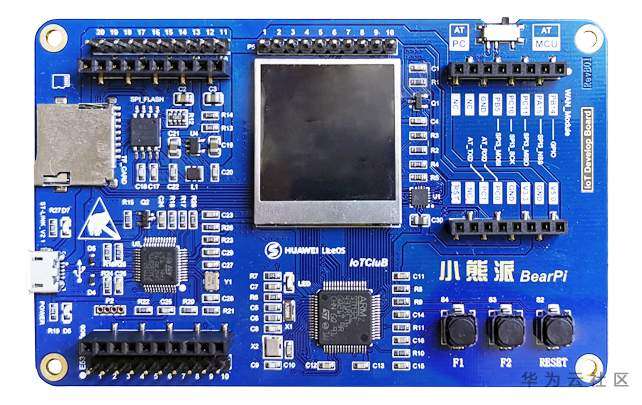
- 一块stm32开发板(推荐使用小熊派),以及数据线
- 已经安装STM32CubeMX
- 已经安装KeilMDK,并导入stm32开发板对应的芯片包(小熊派使用的是STM32L431RCT6)
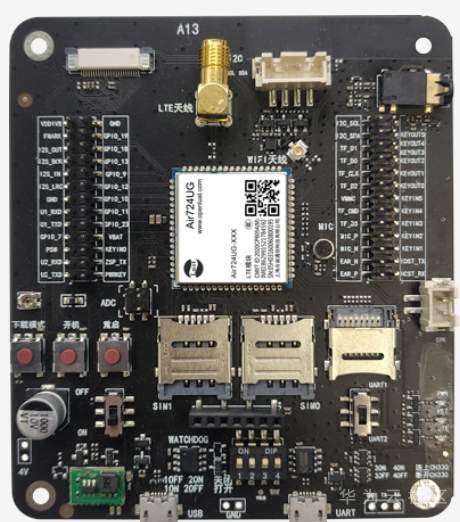
- 一个Cat.1模块(Uart接口,AT指令)以及杜邦线
2.目标效果
- 通过CubeMX创建工程并配置参数
- 通过串口2,以AT指令控制通信模组
- Cat.1发送相应的AT指令接入云服务器
- 通过MQTT协议,完成数据订阅、发布
二、通过CubeMX生产MDK工程
A.芯片选择
- 打开CubeMX,进入芯片选择:
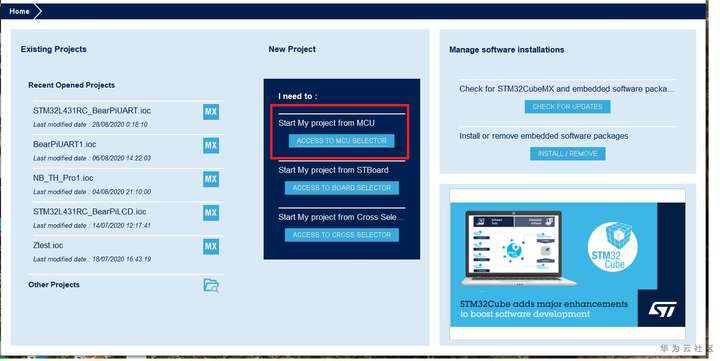
- 选择自己的stm32芯片(即STM32L431RCT6):

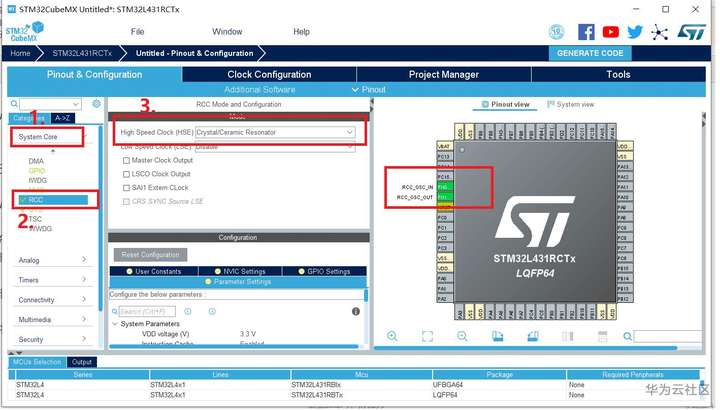
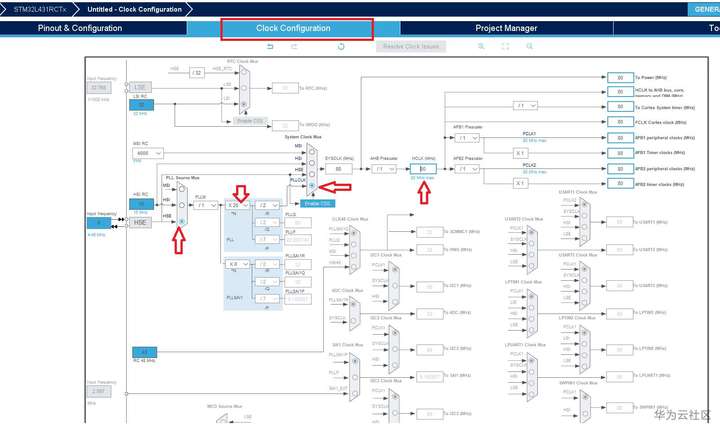
B.时钟源RCC设置
- 更改系统时钟源
系统时钟默认使用内部的高速时钟(HSI),选择使用HSE,时钟更精确
- 设置外部时钟对应的端口
- 配置时钟树
STM32L431RCT6系统时钟最大可以为80MHz,我们配置到最大即可
C.参数配置(对应端口设置)
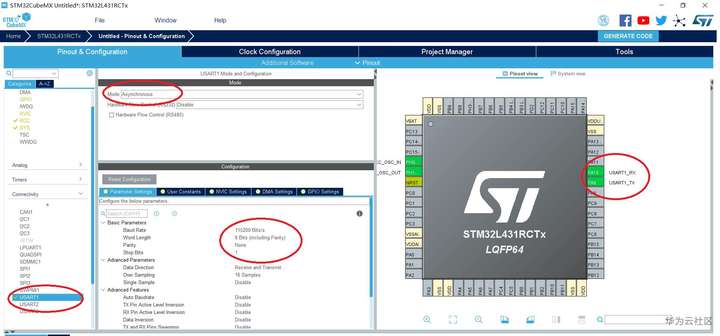
1)配置USART1
使用USART,模式为异步,波特率为115200,无硬件流控制
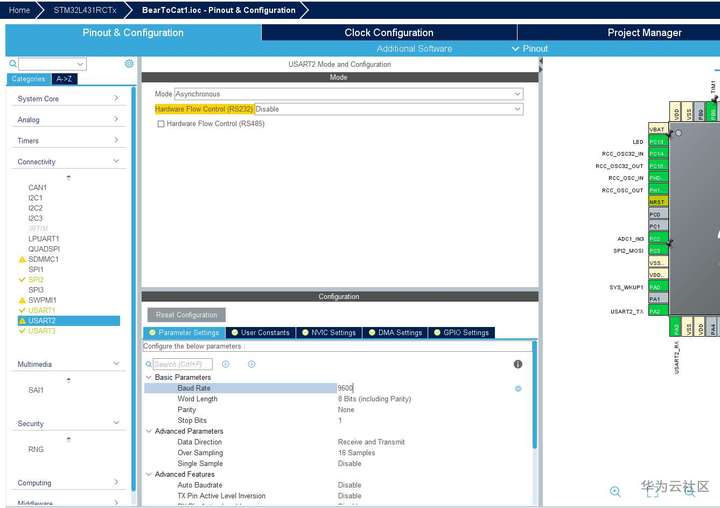
2)配置UART2,连接Cat.1
Cat.1模组烧录有AT固件,当然合宙的也支持Luat开发,我们为了更方便学习,就是要AT指令开发
我们使用小熊派的Uart2,小熊派引出的引脚为PA2->USART_TX,PA3->USART_RX
其他选项,波特率设置为9600,其他默认即可
3)打开Uart2中断,并开启接收DMA
开启中断

打开接收DMA

最后,生成代码就OK了
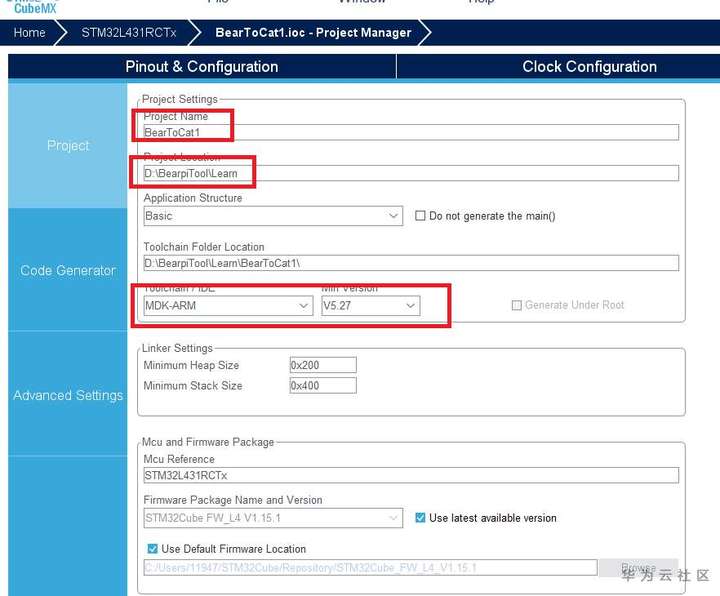
D.工程设置
一些基础的设置,包括工程名、存储位置、工程环境、工程中各个文件的组成
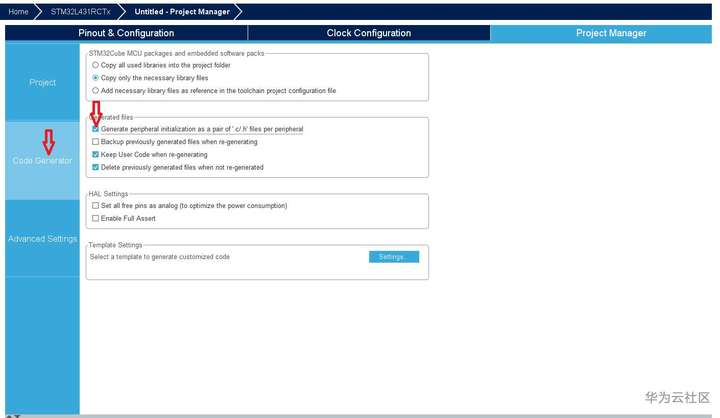
E.生成代码

三、编写相应代码
1. 串口1输出重定向
我们知道printf是打印函数,原理是根据传入的字符串参数格式化打印输出到stdout中。我们需要让printf打印到串口之中,只需要在usart.c文件中模仿printf写一个输出函数即可
- 在添加头文件
/* USER CODE BEGIN 0 */ #include <stdarg.h> #include <string.h> #include <stdio.h> /* USER CODE END 0 */ 写输出函数 /* USER CODE BEGIN 1 */ void UsartPrintf(UART_HandleTypeDef *huart, char *fmt,...) { unsigned char UsartPrintfBuf[296]; va_list ap; unsigned char *pStr = UsartPrintfBuf; va_start(ap, fmt); vsprintf((char *)UsartPrintfBuf, fmt, ap); //格式化 va_end(ap); while(*pStr != 0) { USART1->TDR = *pStr++; while((USART1->ISR & 0x40) == 0); } } //注意:在usart.h中添加void UsartPrintf(UART_HandleTypeDef *huart, char *fmt,...); //使用方法:UsartPrintf(&huart1;,"hello world\r\n"); /* USER CODE END 1 */
注意:自己添加的代码,需要在begin和end之间
2.通信的主要代码
我们创建两个文件,分别是Cat1.h和Cat.c
同时,完善串口2的收发功能,加入串口回调函数保证数据的完整
a).串口回调函数
因为在进行发送AT指令后,接受的数据要进行处理;一方处理速度跟不上,因此加入一个串口回调函数
//串口回调函数 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART2) { if(Usart2type.UsartRecLen>0) //证明还有未完成数据 { memcpy(&Usart2type.Usart2RecBuffer[Usart2type.UsartRecLen],Usart2type.Usart2DMARecBuffer,Usart2type.UsartDMARecLen); //转存到待处理区域 Usart2type.UsartRecLen += Usart2type.UsartDMARecLen; } else { memcpy(Usart2type.Usart2RecBuffer,Usart2type.Usart2DMARecBuffer,Usart2type.UsartDMARecLen); //转存到待处理区域 Usart2type.UsartRecLen = Usart2type.UsartDMARecLen; } memset(Usart2type.Usart2DMARecBuffer, 0x00, sizeof(Usart2type.Usart2DMARecBuffer)); //先清空DMA缓冲区 Usart2type.UsartRecFlag = 1; } }
b).串口2空闲中断
当发送或接受完成一组数据后,进入空闲中断
函数如下
void USART2_IRQHandler(void) { /* USER CODE BEGIN USART2_IRQn 0 */ if(__HAL_UART_GET_FLAG(&huart2,UART_FLAG_IDLE) ==SET) //触发空闲中断 { uint16_t temp = 0; __HAL_UART_CLEAR_IDLEFLAG(&huart2); //清除串口2空闲中断标志位 HAL_UART_DMAStop(&huart2); //关闭DMA temp = huart2.Instance->ISR; //清除SR状态寄存器 F0 ISR temp = huart2.Instance->RDR; //读取DR数据寄存器 F0 RDR 用来清除中断 temp = hdma_usart2_rx.Instance->CNDTR; //获取DMA中未传输的数据个数 Usart2type.UsartDMARecLen = USART2_DMA_REC_SIE - temp; //总计数减去未传输的数据个数,得到已经接收的数据个数 HAL_UART_RxCpltCallback(&huart2); //串口接收回调函数 } /* USER CODE END USART2_IRQn 0 */ HAL_UART_IRQHandler(&huart2); /* USER CODE BEGIN USART2_IRQn 1 */ HAL_UART_Receive_DMA(&huart2,Usart2type.Usart2DMARecBuffer,USART2_DMA_REC_SIE); //重新打开DMA接收 /* USER CODE END USART2_IRQn 1 */ }
C).AT指令通信流程
主要的AT指令如下
tsATCmds ATCmds[] = { {"AT\r\n","OK",200,NO_REC,10}, //测试 {"AT+CIMI\r\n","4600",200,NO_REC,10}, // 移动卡号 {"AT+CSQ\r\n","+CSQ",200,NO_REC,10}, //信号 {"AT+CEREG?\r\n","+CEREG: 0,1",200,NO_REC,10}, //网络 {"AT+CGATT?\r\n","+CGATT:1",200,NO_REC,10}, //驻网 {"AT+CCLK?\r\n","+CCLK",200,NO_REC,10}, //时间 {"AT+MCONFIG=0001,door,2020\r\n","OK",200,NO_REC,10}, //MQTT参数 //{"AT+MCONFIG=111,device1,123456\r\n","OK",200,NO_REC,100}, {"AT+MDISCONNECT\r\n","",200,NO_REC,5}, //断开MQTT连接 {"AT+MIPCLOSE\r\n","",200,NO_REC,5}, //断开TCP连接 {"AT+MIPSTART=123.56.117.8,1883\r\n","CONNECT OK",200,NO_REC,5}, //建立TCP连接 {"AT+MCONNECT=1,60\r\n","CONNACK OK",200,NO_REC,5}, //建立MQTT连接 {"AT+MSUB=","SUBACK",200,NO_REC,5}, //订阅主题 {"AT+MPUB=","OK",200,NO_REC,5}, //发布主题 {"AT+MQTTSTATU\r\n","+MQTTSTATU",200,NO_REC,5}, //状态 //AT+MQTTSTATU 0-离线 1-正常 2-需发送MCONNECT {"AT+RESET\r\n","",200,NO_REC,5}//重启 };
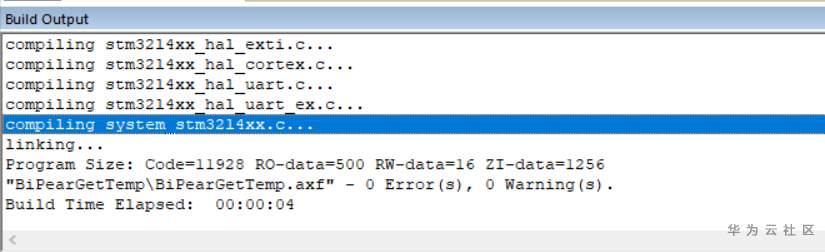
四、编译+下载
点击编译后,0 error,0 warning
小熊派连接在电脑上,代码下载到开发板

五、连接硬件
1.将Cat.1的uart1_tx连接小熊派uart2_rx,cat.1的uart1_rx连接小熊派uart2_tx;Gnd连Gnd;
注意:一定要连接GND哦,需要共地的。
2.调试
此时,我们进行最后一次调试;将小熊派串口1用作串口打印,打开串口调试助手,查看运行状态(在每次发送指令后进行printf()打印相应信息)。
附件中包含CubeMX工程、MDK工程
下一步,打算将此设备接入华为云IoTDA,更好的完成设备管理

 浙公网安备 33010602011771号
浙公网安备 33010602011771号