

ros中urdf文件rviz运行
安装urdf-tutorial安装

check_urdf 01_car-skeleton.urdf验证文件是否编辑错误
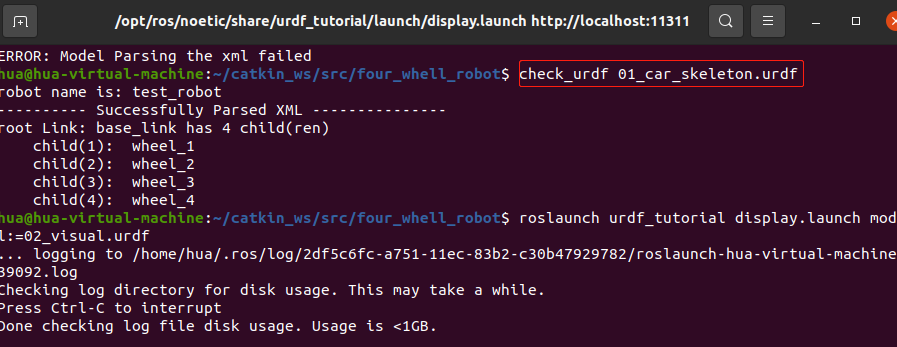
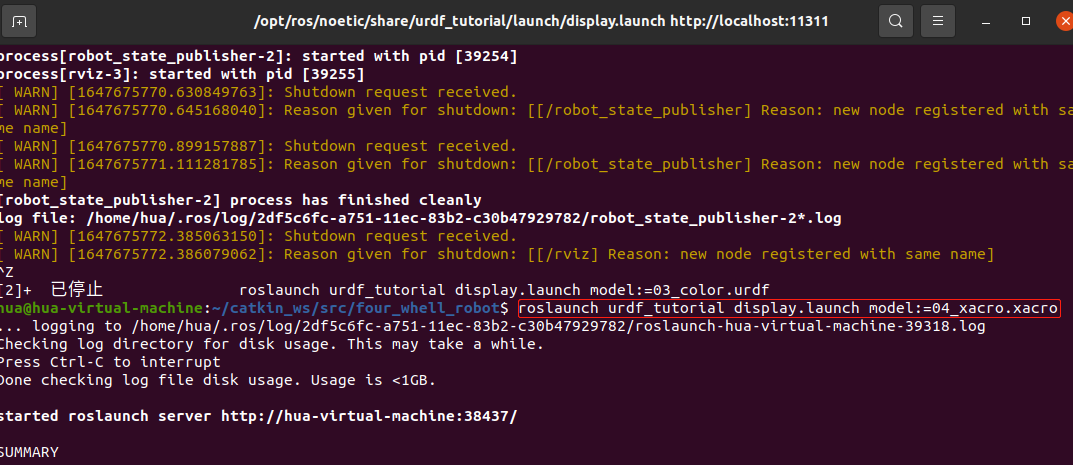
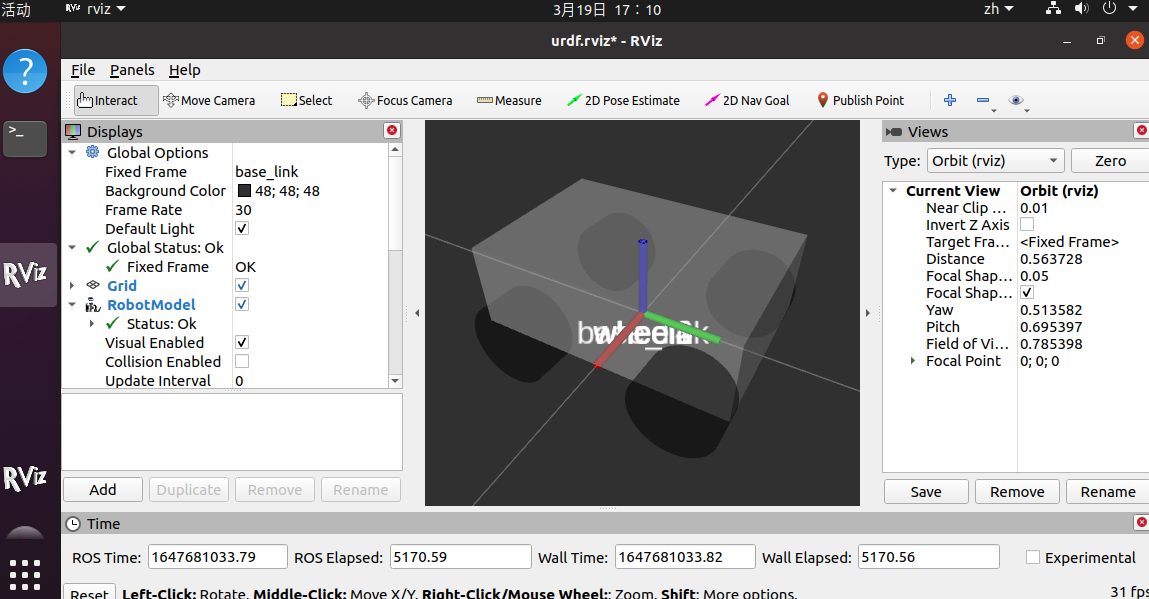
roslaunch urdf_tutorial display.launch model:=04_xacro.xacro运行

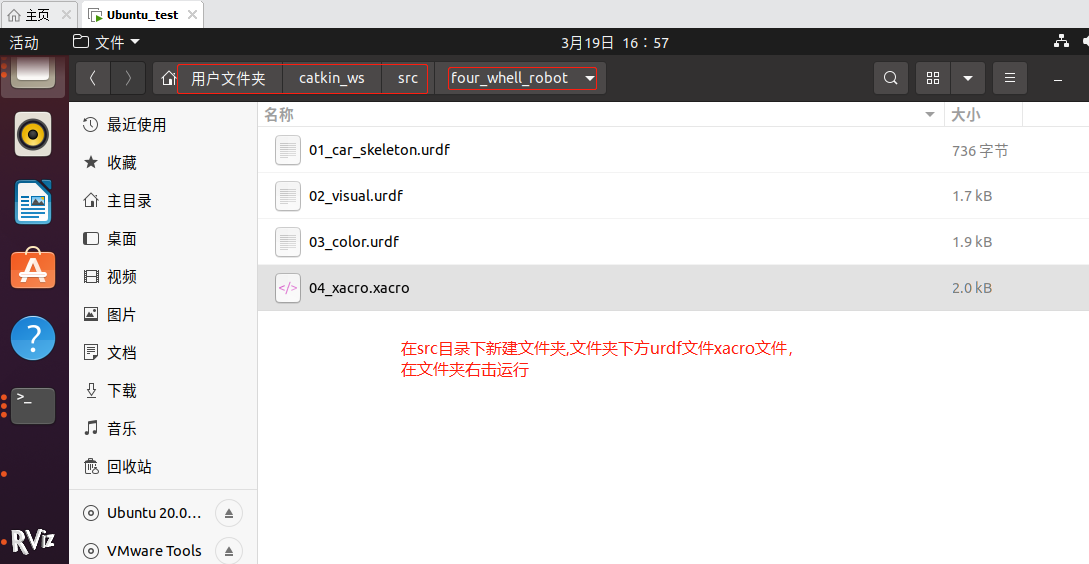
<--01_car_skeleton.urdf--> <robot name="test_robot"> <link name="base_link" /> <link name="wheel_1" /> <link name="wheel_2" /> <link name="wheel_3" /> <link name="wheel_4" /> <joint name="joint_base_wheel1" type="fixed"> <parent link="base_link"/> <child link="wheel_1"/> </joint> <joint name="joint_base_wheel2" type="fixed"> <parent link="base_link"/> <child link="wheel_2"/> </joint> <joint name="joint_base_wheel3" type="fixed"> <parent link="base_link"/> <child link="wheel_3"/> </joint> <joint name="joint_base_wheel4" type="fixed"> <parent link="base_link"/> <child link="wheel_4"/> </joint> </robot>
<--02_visual.urdf.urdf--> <robot name="test_robot"> <link name="base_link"> <visual> <geometry> <box size="0.2 .3 .1"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0.05"/> </visual> </link> <link name="wheel_1"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/> </visual> </link> <link name="wheel_2"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/> </visual> </link> <link name="wheel_3"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/> </visual> </link> <link name="wheel_4"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/> </visual> </link> <joint name="joint_base_wheel1" type="fixed"> <parent link="base_link"/> <child link="wheel_1"/> </joint> <joint name="joint_base_wheel2" type="fixed"> <parent link="base_link"/> <child link="wheel_2"/> </joint> <joint name="joint_base_wheel3" type="fixed"> <parent link="base_link"/> <child link="wheel_3"/> </joint> <joint name="joint_base_wheel4" type="fixed"> <parent link="base_link"/> <child link="wheel_4"/> </joint> </robot>
<--03_color.urdf.urdf--> <robot name="test_robot"> <link name="base_link"> <visual> <geometry> <box size="0.2 .3 .1"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0.05"/> <material name="white"> <color rgba="1 1 1 1"/> </material> </visual> </link> <link name="wheel_1"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="0.1 0.1 0"/> <material name="black"> <color rgba="0 0 0 1"/> </material> </visual> </link> <link name="wheel_2"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="-0.1 0.1 0"/> <material name="black"/> </visual> </link> <link name="wheel_3"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/> <material name="black"/> </visual> </link> <link name="wheel_4"> <visual> <geometry> <cylinder length="0.05" radius="0.05"/> </geometry> <origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/> <material name="black"/> </visual> </link> <joint name="joint_base_wheel1" type="fixed"> <parent link="base_link"/> <child link="wheel_1"/> </joint> <joint name="joint_base_wheel2" type="fixed"> <parent link="base_link"/> <child link="wheel_2"/> </joint> <joint name="joint_base_wheel3" type="fixed"> <parent link="base_link"/> <child link="wheel_3"/> </joint> <joint name="joint_base_wheel4" type="fixed"> <parent link="base_link"/> <child link="wheel_4"/> </joint> </robot>
<--04_xacro.xacro--> <robot name="test_robot"> <link name="base_link" /> <link name="wheel_1" /> <link name="wheel_2" /> <link name="wheel_3" /> <link name="wheel_4" /> <joint name="joint_base_wheel1" type="fixed"> <parent link="base_link"/> <child link="wheel_1"/> </joint> <joint name="joint_base_wheel2" type="fixed"> <parent link="base_link"/> <child link="wheel_2"/> </joint> <joint name="joint_base_wheel3" type="fixed"> <parent link="base_link"/> <child link="wheel_3"/> </joint> <joint name="joint_base_wheel4" type="fixed"> <parent link="base_link"/> <child link="wheel_4"/> </joint> </robot>


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 分享一个免费、快速、无限量使用的满血 DeepSeek R1 模型,支持深度思考和联网搜索!
· 25岁的心里话
· 基于 Docker 搭建 FRP 内网穿透开源项目(很简单哒)
· ollama系列01:轻松3步本地部署deepseek,普通电脑可用
· 按钮权限的设计及实现