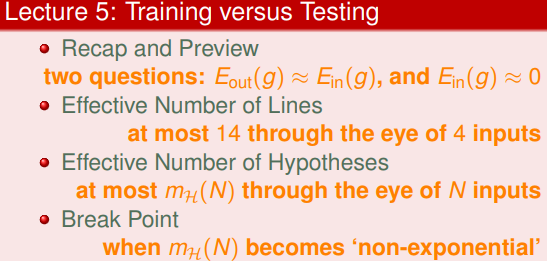
05 Training versus Testing
回顾上节内容:假设空间H有限,N足够大,不管A选择哪个h,Ein和Eout在一定范围内都是近似相等的,A根据D在H中挑选使得Ein足够小的g,就能说Ein=Eout(PAC),即学习是可能的。
将学习分为两步:


思考:①我们是否能保证Eout(g)≈Ein(g);②是否能保证Ein(g)≈0?

①当M小时,根据霍夫丁不等式,坏事情发生的可能性很小,所以满足Eout(g)≈Ein(g),但是M小,可供选择的h少,不一定能保证Ein(g)≈0。
②当M大时,根据霍夫丁不等式,坏事情发生的可能性不一定很小,所以不一定满足Eout(g)≈Ein(g),但是M大,可供选择的h多,能保证Ein(g)≈0。
综上,应该选择适当大的M,不能过大或者过小。
前面已经解决了M有限的情况,下面解决无限大的M:
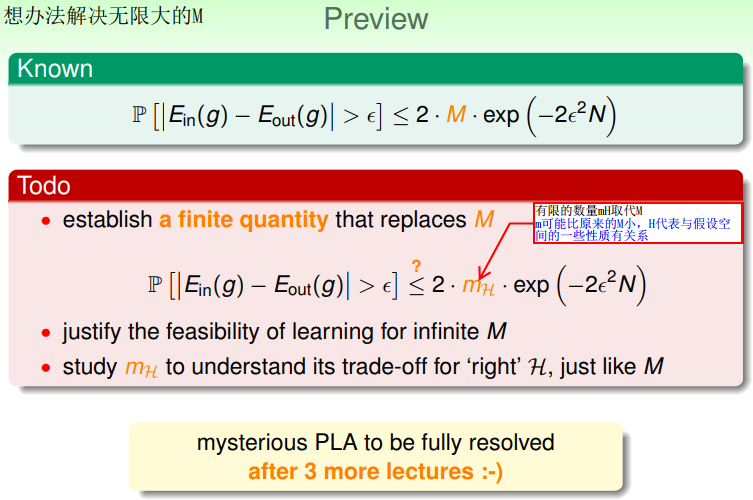
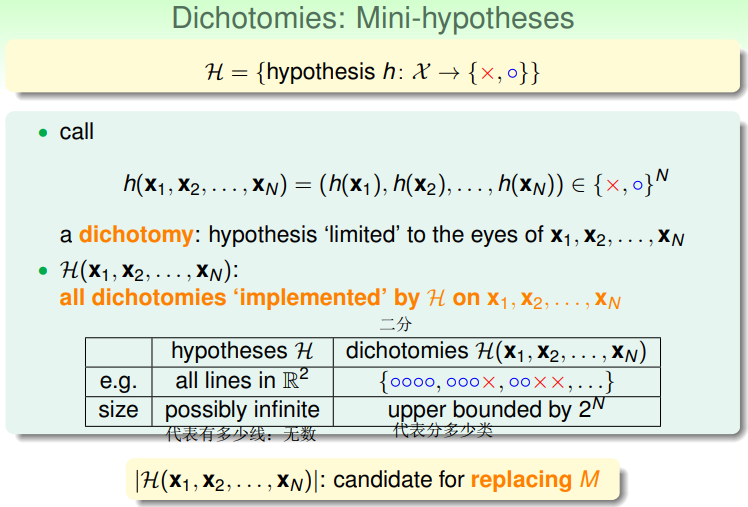
想办法找到有限值mH取代M:m表示可能比原来的M小,H代表与假设空间的一些性质有关系。
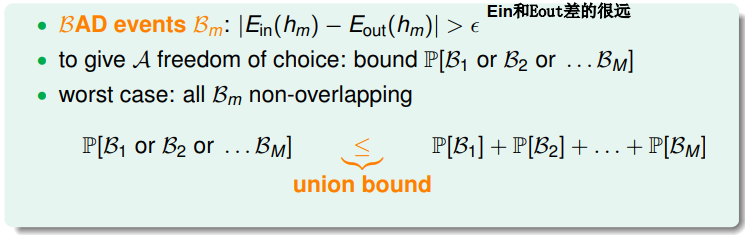
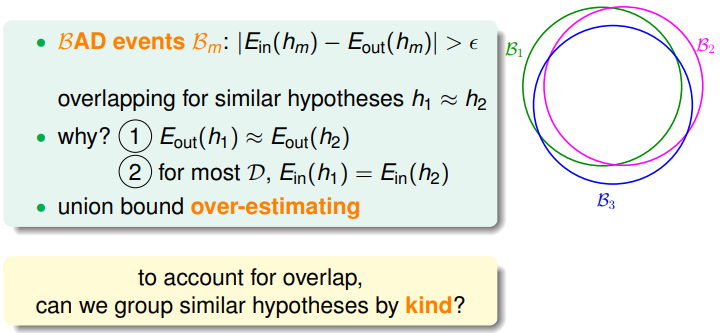
霍夫丁不等式本质是求并集,但是右边的式子2Mexp()是在默认无交集的情况下进行的,但是对于给定的D,在H中存在相似的h,这些h在D上的表现一致,即存在交集,所以2Mexp()作为上限来说过大了。将H中相似的h分为一类,将无限的|H|变为有限的类数dichotomies,每一个dichotomy在D上表现相同。
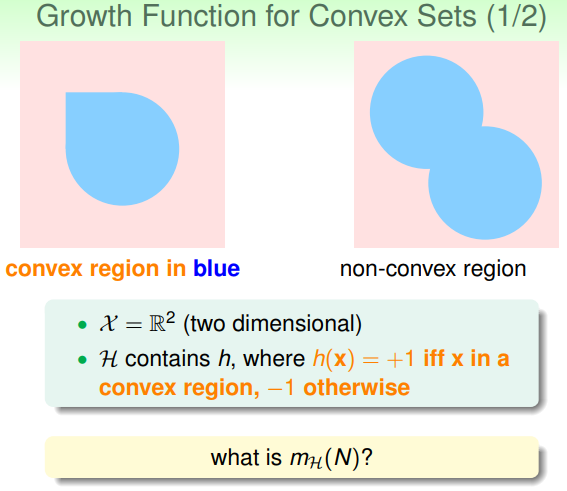
举例:感知机算法,考虑平面上的所有线
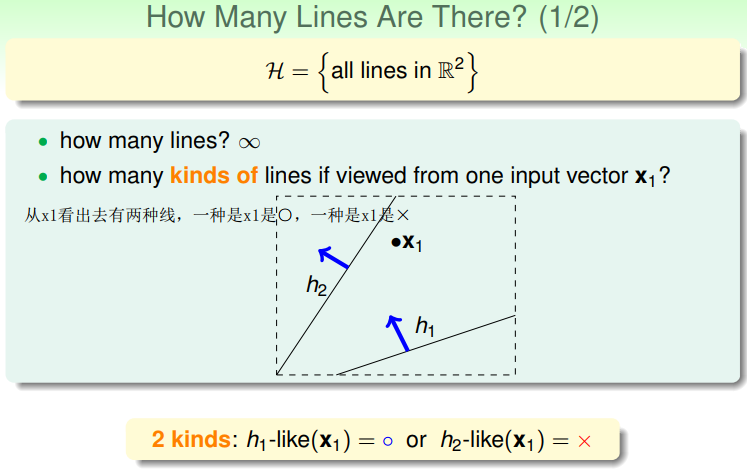
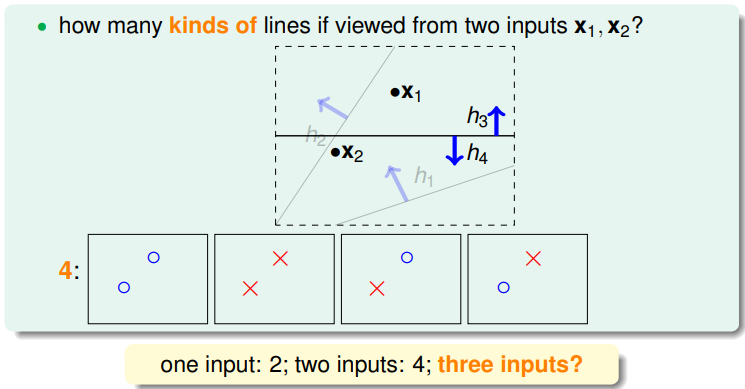
H是无限的,平面上有无数条直线,平面上有一个点x1,从x1看出去有两种线,一种是x1是○,一种是x1是×。平面上有两个点x1,x2,有四种类型的线,将D分为○○、○×、×○、××的h分别归为一类。
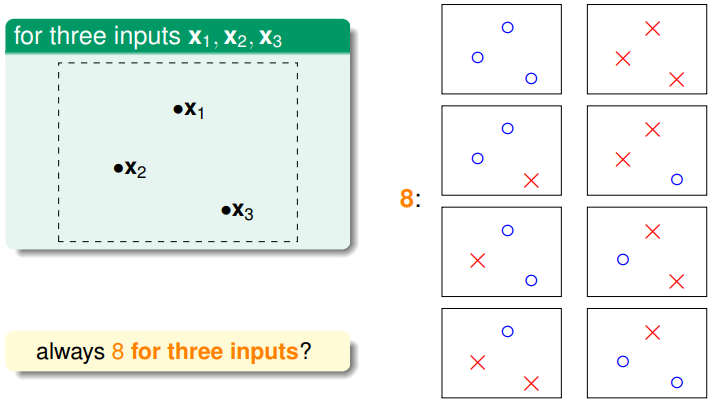
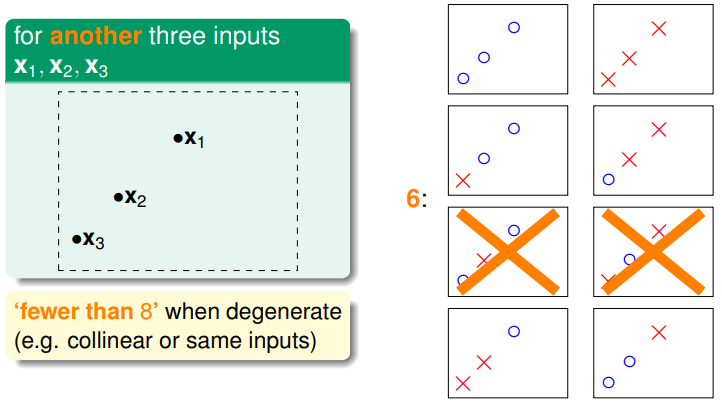
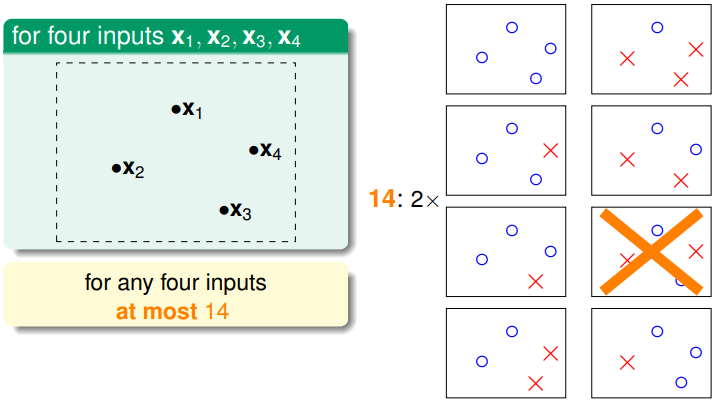
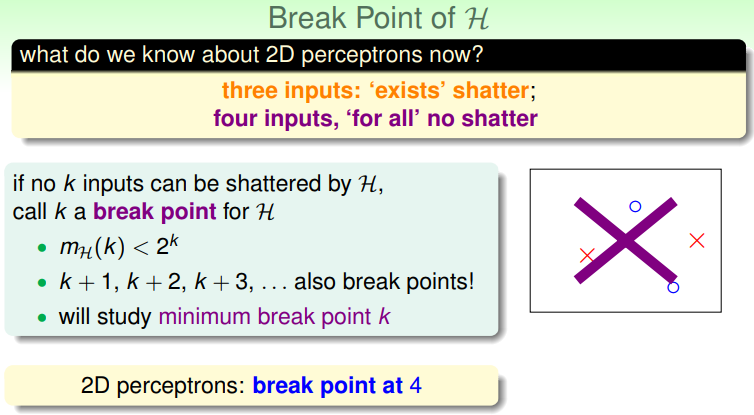
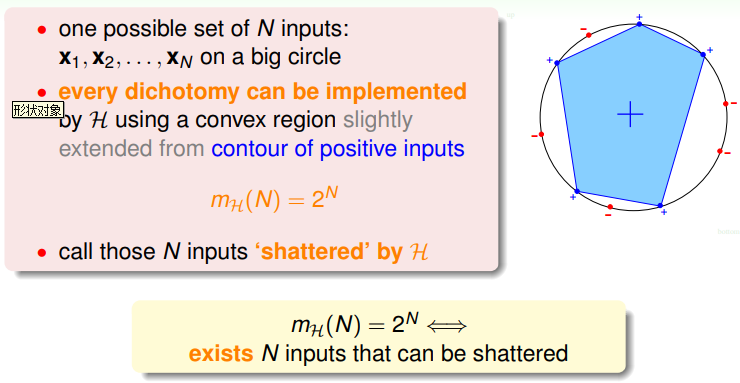
平面上有三个点时,根据点的分布不同,直线的类别也不同,可能是8类,也可能是6类(不超过2的N次方),所以dichotomies的数量是依赖于具体D(个数和分布)和H的,但是dichotomies的数量的最大值只依赖与D里样本点的个数N和H。
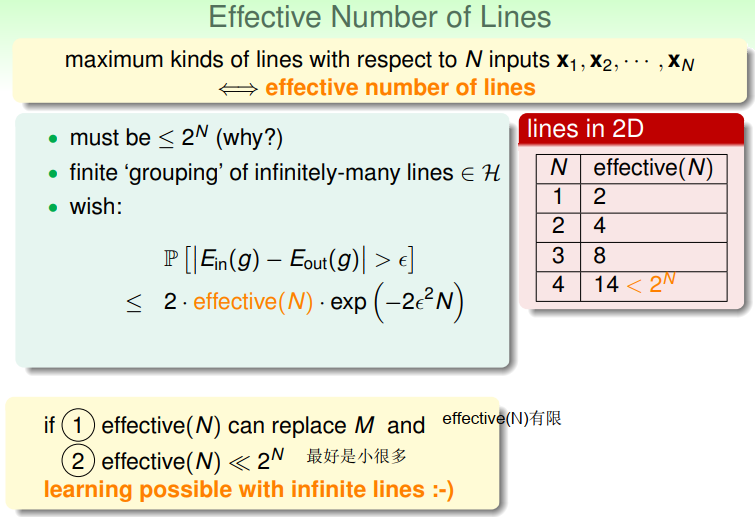
所以我们可以用类别最大值来代替M,该最大值是有限的并且远远小于2的N次方。
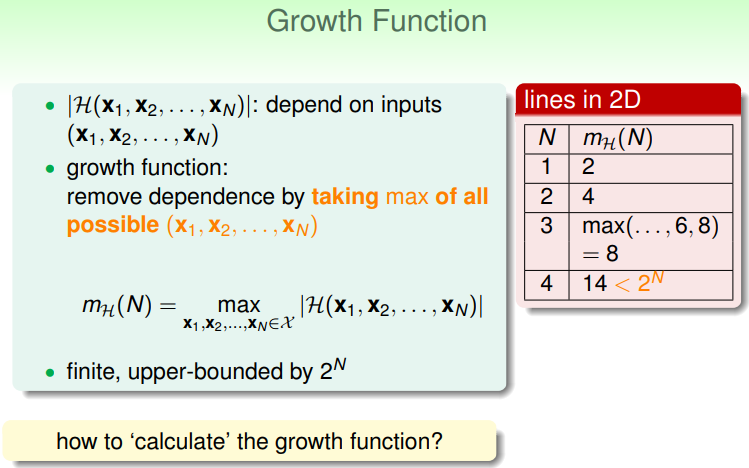
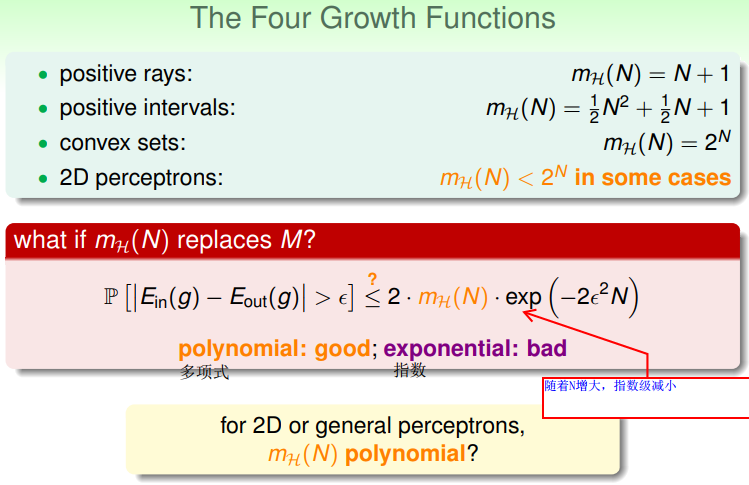
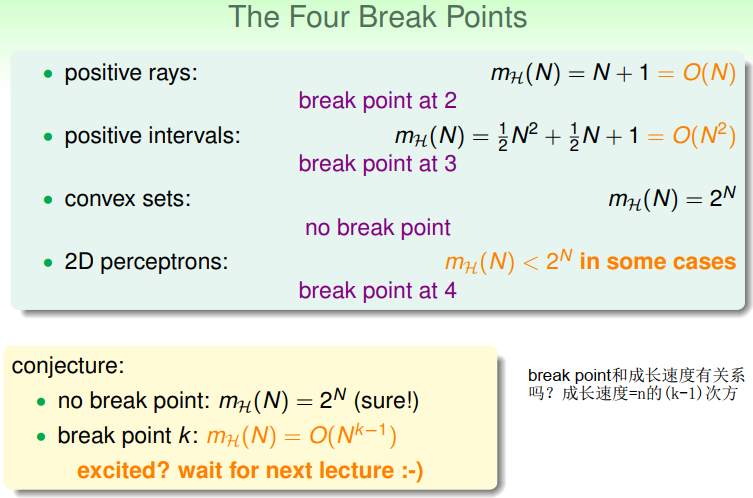
可以看出,成长函数可能是多项式形式的(好的),也可能是指数形式的(坏的),因为exp()是指数减少的,多项式形式增加的比指数减少的慢,能保证最终右式2Mexp()趋于0,所以多项式型的成长函数能保证坏事情发生的可能性很小,但是指数型的不一定。