

维特比算法(viterbi)原理以及简单实现
维特比算法
看一下维基百科的解释,维特比算法(Viterbi algorithm)是一种动态规划算法。它用于寻找最有可能产生观测事件序列的维特比路径——隐含状态序列,特别是在马尔可夫信息源上下文和隐马尔可夫模型中。
通俗易懂的解释知乎有很多,如:如何通俗地讲解 viterbi 算法?,我我这里重点是如何用python代码实现这个算法。
算法原理
维特比算法就是求所有观测序列中的最优,如下图所示,我们要求从S到E的最优序列,中间有3个时刻,每个时刻都有对应的不同观察的概率,下图中每个时刻不同的观测标签有3个。

求所有路径中最优路径,最容易想到的就是暴力解法,直接把所有路径全部计算出来,然后找出最优的。这方法理论上是可行,但当序列很长时,时间复杂夫很高。而且进行了大量的重复计算,viterbi算法就是用动态规划的方法就减少这些重复计算。
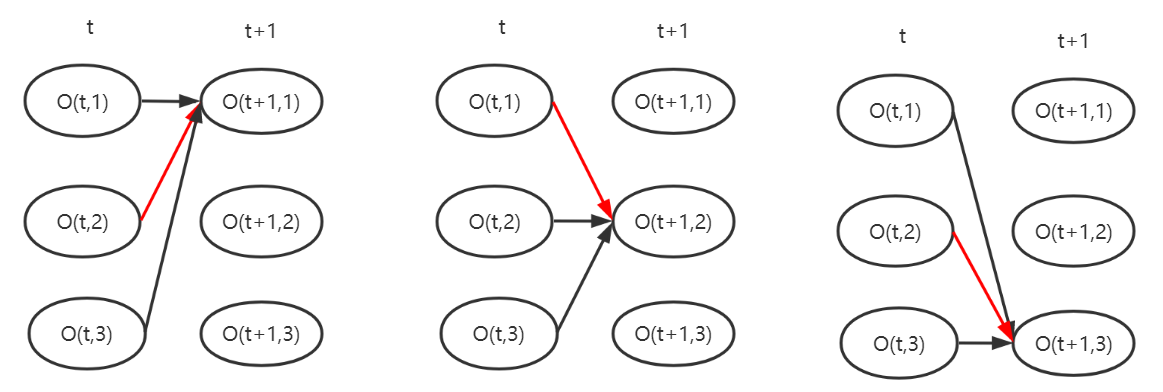
viterbi算法是每次记录到当前时刻,每个观察标签的最优序列,如下图,假设在t时刻已经保存了从0到t时刻的最优路径,那么t+1时刻只需要计算从t到t+1的最优就可以了,图中红箭头表示从t时刻到t+1时刻,观测标签为1,2,3的最优。
每次只需要保存到当前位置最优路径,之后循环向后走。到结束时,从最后一个时刻的最优值回溯到开始位置,回溯完成后,这个从开始到结束的路径就是最优的。

代码实现
下面用python简单实现一下viterbi算法
import numpy as np
def viterbi_decode(nodes, trans):
"""
Viterbi算法求最优路径
其中 nodes.shape=[seq_len, num_labels],
trans.shape=[num_labels, num_labels].
"""
# 获得输入状态序列的长度,以及观察标签的个数
seq_len, num_labels = len(nodes), len(trans)
# 简单起见,先不考虑发射概率,直接用起始0时刻的分数
scores = nodes[0].reshape((-1, 1))
paths = []
# 递推求解上一时刻t-1到当前时刻t的最优
for t in range(1, seq_len):
# scores 表示起始0到t-1时刻的每个标签的最优分数
scores_repeat = np.repeat(scores, num_labels, axis=1)
# observe当前时刻t的每个标签的观测分数
observe = nodes[t].reshape((1, -1))
observe_repeat = np.repeat(observe, num_labels, axis=0)
# 从t-1时刻到t时刻最优分数的计算,这里需要考虑转移分数trans
M = scores_repeat + trans + observe_repeat
# 寻找到t时刻的最优路径
scores = np.max(M, axis=0).reshape((-1, 1))
idxs = np.argmax(M, axis=0)
# 路径保存
paths.append(idxs.tolist())
best_path = [0] * seq_len
best_path[-1] = np.argmax(scores)
# 最优路径回溯
for i in range(seq_len-2, -1, -1):
idx = best_path[i+1]
best_path[i] = paths[i][idx]
return best_path
代码中整队scores和observe的repeat复制操作,是为了方便矩阵运算,减少循环的操作。
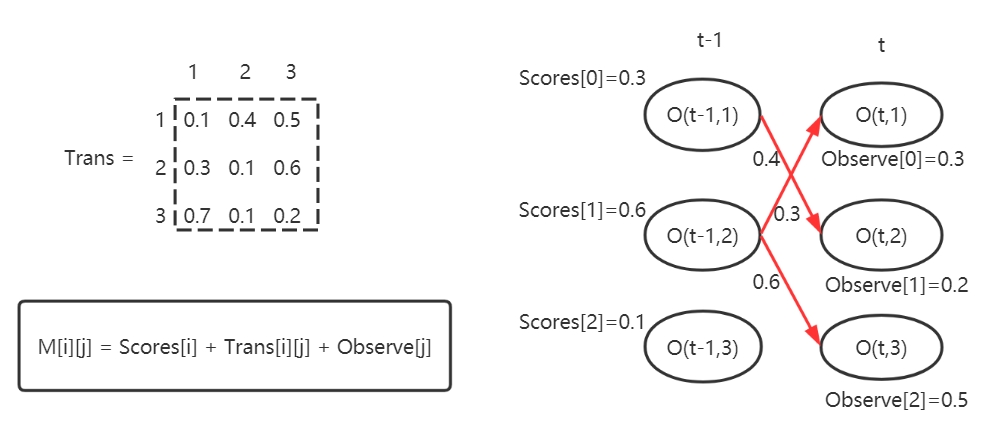
如果将M = scores_repeat + trans + observe_repeat,展开用for循环写,在t时刻M[i][j] = scores[i] + trans[i][j] + observe[j],M[i][j]表示从t-1时刻为i-1状态,t时刻为j-1状态的分数。
下面就是展开用for训练一步一步求解的伪码。
# 每个时刻scores更新的伪码
for t in range(1, seq_len):
tmp_scores = scores
for j in range(nums_labels):
for i in range(nums_labels):
M[i][j] = scores[i] + trans[i][j] + observe[t][j]
tmp_scores[j] = max(M[i][j]) (0 <= i < nums_labels)
scores = tmp_scores
可以利用矩阵计算的原理,合并一些步骤。
for t in range(1, seq_len):
scores_repeat = np.repeat(scores, num_labels, axis=1)
observe = nodes[t].reshape((1, -1))
observe_repeat = np.repeat(observe, num_labels, axis=0)
M = scores_repeat + trans + observe_repeat
scores = np.max(M, axis=0).reshape((-1, 1))
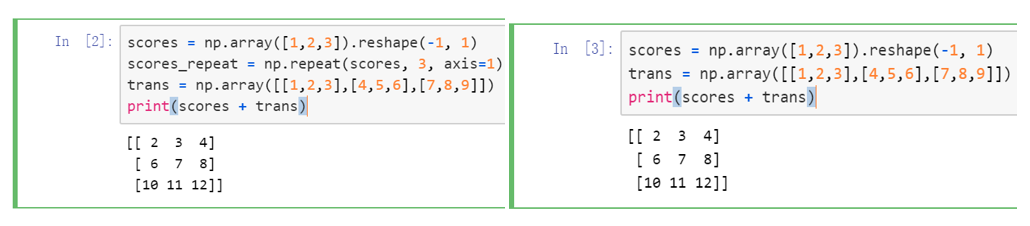
这里还有对scores和observe进行复制的操作,numpy运算中还可以在简化。
for t in range(1, seq_len):
observe = nodes[t].reshape((1, -1))
M = scores + trans + observe
scores = np.max(M, axis=0).reshape((-1, 1))
numpy在相加时可以自动扩充维度,横向和纵向都可以。
经过简化的viterbi算法完整版。
def viterbi_decode_v2(nodes, trans):
"""
Viterbi算法求最优路径v2
其中 nodes.shape=[seq_len, num_labels],
trans.shape=[num_labels, num_labels].
"""
seq_len, num_labels = len(nodes), len(trans)
scores = nodes[0].reshape((-1, 1))
paths = []
# # 递推求解上一时刻t-1到当前时刻t的最优
for t in range(1, seq_len):
observe = nodes[t].reshape((1, -1))
M = scores + trans + observe
scores = np.max(M, axis=0).reshape((-1, 1))
idxs = np.argmax(M, axis=0)
paths.append(idxs.tolist())
best_path = [0] * seq_len
best_path[-1] = np.argmax(scores)
# 最优路径回溯
for i in range(seq_len-2, -1, -1):
idx = best_path[i+1]
best_path[i] = paths[i][idx]
return best_path
还有一种写法,最后不用回溯,每次把最优路径的索引都保存起来,并添加一个正常的路径,最后直接按索引找出最优路径,这个代码很少,但是不太好理解。
def viterbi_decode_v3(nodes, trans):
"""
Viterbi算法求最优路径
其中 nodes.shape=[seq_len, num_labels],
trans.shape=[num_labels, num_labels].
"""
seq_len, num_labels = len(nodes), len(trans)
labels = np.arange(num_labels).reshape((1, -1))
scores = nodes[0].reshape((-1, 1))
paths = labels
for t in range(1, seq_len):
observe = nodes[t].reshape((1, -1))
M = scores + trans + observe
scores = np.max(M, axis=0).reshape((-1, 1))
idxs = np.argmax(M, axis=0)
paths = np.concatenate([paths[:, idxs], labels], 0)
best_path = paths[:, scores.argmax()]
return best_path

