


势函数主要用于确定分类面,其思想来源于物理。
1 势函数法基本思想
- 假设要划分属于两种类别和的模式样本,这些样本可看成是分布在维模式空间中的点。
- 把属于的点比拟为某种能源点,在点上,电位达到峰值。
- 随着与该点距离的增大,电位分布迅速减小,即把样本附近空间点上的电位分布,看成是一个势函数。
- 对于属于的样本集群,其附近空间会形成一个"高地",这些样本点所处的位置就是"山头"。
- 同理,用电位的几何分布来看待属于的模式样本,在其附近空间就形成"凹地"。
- 只要在两类电位分布之间选择合适的等高线,就可以认为是模式分类的判别函数。
2. 判别函数的产生
- 模式分类的判别函数可由分布在模式空间中的许多样本向量的势函数产生。
- 任意一个样本所产生的势函数以表征,则判别函数可由势函数序列来构成,序列中的这些势函数相应于在训练过程中输入机器的训练模式样本。
- 在训练状态,模式样本逐个输入分类器,分类器就连续计算相应的势函数,在第步迭代时的积累位势决定于在该步前所有的单独势函数的累加。
- 以表示积累位势函数,若加入的训练样本是错误分类,则积累函数需要修改,若是正确分类,则不变。
3.判别函数产生逐步分析
设初始势函数
第一步:加入第一个训练样本,
则有
这里第一步积累势函数描述了加入第一个样本时的边界划分。当样本属于时,势函数为正;当样本属于时,势函数为负。
第二步:加入第二个训练样本,
则有
- 若且,或且,则分类正确,此时,即积累势函数不变。
- 若且,则
- 若且,则
以上(ii)、(iii)两种情况属于错分。假如处于定义的边界的错误一侧,则当时,积累位势要加,当时,积累位势要减。
第步:设为加入训练样本后的积累位势,则加入第个样本时,决定如下:
1. 若且,或且,则分类正确,此时,即积累位势不变。
2. 若且,则;
3. 若且,则.
因此,积累位势的迭代运算可写成:,为校正系数:
若从给定的训练样本集中去除不使积累位势发生变化的样本,即使且,或且的那些样本,则可得一简化的样本序列,它们完全是校正错误的样本。此时,上述迭代公式可归纳为:
其中
也就是说,由个训练样本产生的积累位势,等于类和类两者中的校正错误样本的总位势之差。
从势函数可以看出,积累位势起着判别函数的作用:当属于时,;当属于时,,则积累位势不做任何修改就可用作判别函数。
由于一个模式样本的错误分类可造成积累位势在训练时的变化,因此势函数算法提供了确定和两类判别函数的迭代过程。判别函数表达式:取,则有:.
4 构成势函数的两种方式:
第一类势函数和第二类势函数
第一类势函数:
可用对称的有限多项式展开,即:
其中{ }在模式定义域内为正交函数集。将这类势函数代入判别函数,有:
}在模式定义域内为正交函数集。将这类势函数代入判别函数,有:
得迭代关系:
其中
因此,积累位势可写成:
$Ci$可用迭代式求得。
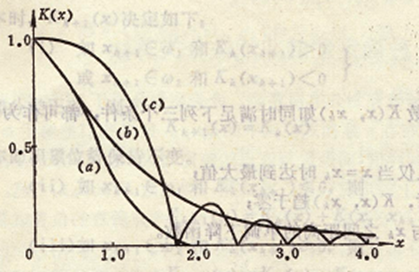
第二类势函数:
选择双变量和$x_k$的对称函数作为势函数,即$K(x, x_k) = K(x_k, x)$,并且它可展开成无穷级数,例如:
(a)
(b) , 是正常数
(c)
5.势函数法
实例1:用第一类势函数的算法进行分类
- 选择合适的正交函数集{
 }
}
 }
} 选择Hermite多项式,其正交域为(-∞, +∞),其一维形式是


其正交性:
其中,Hk(x)前面的乘式为正交归一化因子,为计算简便可省略。因此,Hermite多项式前面几项的表达式为
H0(x)=1, H1(x)=2x, H2(x)=4x2-2,
H3(x)=8x3-12x, H4(x)=16x4-48x2+12
- 建立二维的正交函数集
二维的正交函数集可由任意一对一维的正交函数组成,这里取四项最低阶的二维的正交函数




- 生成势函数
按第一类势函数定义,得到势函数

其中 ,
,
- 通过训练样本逐步计算累积位势K(x)
给定训练样本:ω1类为x①=(1 0)T, x②=(0 -1)T
ω2类为x③=(-1 0)T, x④=(0 1)T
累积位势K(x)的迭代算法如下
第一步:取x①=(1 0)T∈ω1,故
K1(x)=K(x, x①)=1+4x1·1+4x2·0+16x1x2·1·0=1+4x1
第二步:取x②=(0 -1)T∈ω1,故K1(x②)=1+4·0=1
因K1(x②)>0且x②∈ω1,故K2(x)=K1(x)=1+4x1
第三步:取x③=(-1 0)T∈ω2,故K2(x③)=1+4·(-1)=-3
因K2(x③)<0且x③∈ω2,故K3(x)=K2(x)=1+4x1
第四步:取x④=(0 1)T∈ω2,故K3(x④)=1+4·0=1
因K3(x④)>0且x④∈ω2,
故K4(x)=K3(x)-K(x,x④)=1+4x1-(1+4x2)=4x1-4x2
将全部训练样本重复迭代一次,得
第五步:取x⑤=x①=(1 0)T∈ω1,K4(x⑤)=4
故K5(x)=K4(x)=4x1-4x2
第六步:取x⑥=x②=(0 -1)T∈ω1,K5(x⑥)=4
故K6(x)=K5(x)=4x1-4x2
第七步:取x⑦=x③=(-1 0)T∈ω2,K6(x⑦)=-4
故K7(x)=K6(x)=4x1-4x2
第八步:取x⑧=x④=(0 1)T∈ω2,K7(x⑧)=-4
故K8(x)=K7(x)=4x1-4x2
以上对全部训练样本都能正确分类,因此算法收敛于判别函数
d(x)= 4x1-4x2

实例2:用第二类势函数的算法进行分类
选择指数型势函数,取α=1,在二维情况下势函数为

这里:ω1类为x①=(0 0)T, x②=(2 0)T
ω2类为x③=(1 1)T, x④=(1 -1)T
可以看出,这两类模式是线性不可分的。算法步骤如下:
第一步:取x①=(0 0)T∈ω1,则
K1(x)=K(x,x①)=
第二步:取x②=(2 0)T∈ω1
因K1(x②)=e-(4+0)=e-4>0,
故K2(x)=K1(x)=
第三步:取x③=(1 1)T∈ω2
因K2(x③)=e-(1+1)=e-2>0,
故K3(x)=K2(x)-K(x,x③)=
第四步:取x④=(1 -1)T∈ω2
因K3(x④) =e-(1+1)-e-(0+4)=e-2-e-4>0,
故K4(x)=K3(x)-K(x,x④)
=
需对全部训练样本重复迭代一次
第五步:取x⑤=x①=(0 0)T∈ω1,K4(x⑤)=e0-e-2-e-2=1-2e-2>0
故K5(x)=K4(x)
第六步:取x⑥=x②=(2 0)T∈ω1,K5(x⑥)=e-4-e-2-e-2=e-4-2e-2<0
故K6(x)=K5(x)+K(x,x⑥)
=
第七步:取x⑦=x③=(1 1)T∈ω2,K6(x⑦)=e-2-e0-e-4+e-2=2e-2-e-4-1<0
故K7(x)=K6(x)
第八步:取x⑧=x④=(1 -1)T∈ω2,K7(x⑧)=e-2-e-4-e0+e-2=2e-2-e-4-1<0
故K8(x)=K7(x)
第九步:取x⑨=x①=(0 0)T∈ω1,K8(x⑨)=e0-e-2-e-2+e-4=1+e-4-2e-2>0
故K9(x)=K8(x)
第十步:取x⑩=x②=(2 0)T∈ω1,K9(x⑩)=e-4-e-2-e-2+e0=1+e-4-2e-2>0
故K10(x)=K9(x)
经过上述迭代,全部模式都已正确分类,因此算法收敛于判别函数


势函数分类算法评价:
1.用第二类势函数,当训练样本维数和数目都较高时,需要计算和存储的指数项较多。
2. 正因为势函数由许多新项组成,因此有很强的分类能力。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧