
C# Modbus_TCP通讯 dll库 测试TRIO运动控制器
在项目的实际应用中,通讯是必不可少,最近一直在测试modbus通讯,在网上找到一个合适的免费动态链接库,已在项目上应用,非常稳定。
1、动态链接库网盘地址,里面有dll文件及测试工具,例子。
百度云盘:https://pan.baidu.com/s/1Uunp2CDB8Hz3uyOsWn_Umg 提取码:dac6
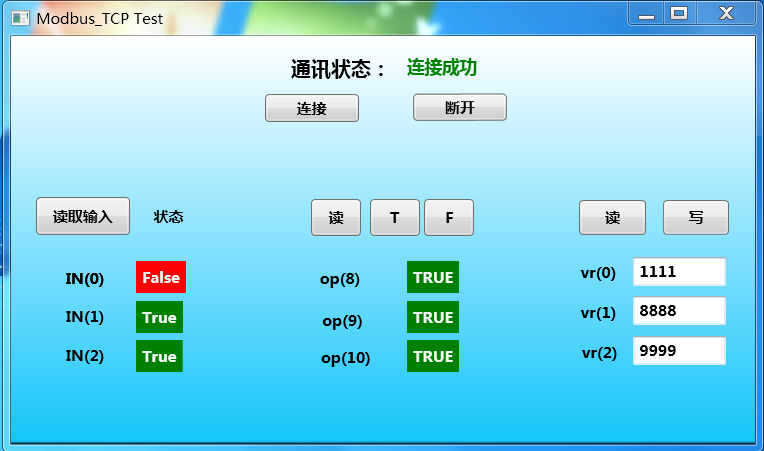
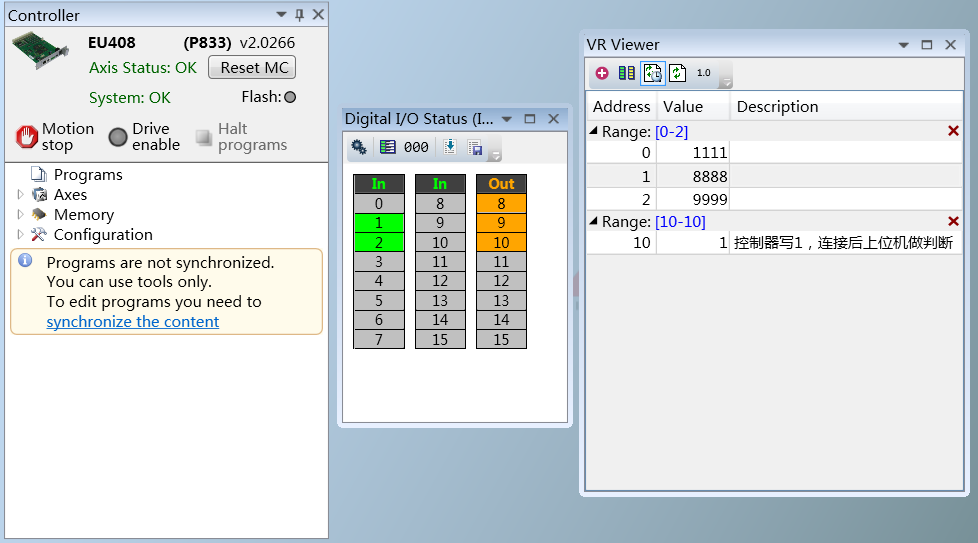
2、下面是我以TRIO为例测试 Modbus_TCP,此外可用西门子,三菱,欧姆龙测试。
测试截图: 连接 ip: 192.168.0.250 prot: 502

连接成功后即可测试
代码:


using System; using System.Collections.Generic; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows; using System.Windows.Controls; using System.Windows.Data; using System.Windows.Documents; using System.Windows.Input; using System.Windows.Media; using System.Windows.Media.Imaging; using System.Windows.Navigation; using System.Windows.Shapes; using EasyModbus; using System.Threading; using System.Text.RegularExpressions; namespace Wpf_TRIO_Modbus_tcp { /// <summary> /// MainWindow.xaml 的交互逻辑 /// </summary> public partial class MainWindow : Window { public MainWindow() { InitializeComponent(); } ModbusClient modbusClient = new ModbusClient("192.168.250",502); //点击连接 private void b_connect_Click(object sender, RoutedEventArgs e) { modbusClient.Connect(); Thread.Sleep(1000); int[] i = modbusClient.ReadInputRegisters(10, 1); foreach (int team in i) { if (team != 1) { ConnectStatus.Content = "连接失败"; } else { ConnectStatus.Content = "连接成功"; ConnectStatus.Foreground = new SolidColorBrush(Colors.Green); } } } //点击断连接 private void b_disconnect_Click(object sender, RoutedEventArgs e) { modbusClient.Disconnect(); Thread.Sleep(1000); ConnectStatus.Content = "未连接..."; ConnectStatus.Foreground = new SolidColorBrush(Colors.Red); } private void b_read_input_Click(object sender, RoutedEventArgs e) { //读取输入 input 信号 : ReadDiscreteInputs bool[] InputStatus = modbusClient.ReadDiscreteInputs(0, 3); if (InputStatus[0] == true) { label3_Copy0.Background = new SolidColorBrush(Colors.Green); label3_Copy0.Content = InputStatus[0].ToString(); } else { label3_Copy0.Background = new SolidColorBrush(Colors.Red); label3_Copy0.Content = InputStatus[0].ToString(); } if (InputStatus[1] == true) { label3_Copy1.Background = new SolidColorBrush(Colors.Green); label3_Copy1.Content = InputStatus[1].ToString(); } else { label3_Copy1.Background = new SolidColorBrush(Colors.Red); label3_Copy1.Content = InputStatus[1].ToString(); } if (InputStatus[2] == true) { label3_Copy2.Background = new SolidColorBrush(Colors.Green); label3_Copy2.Content = InputStatus[2].ToString(); } else { label3_Copy2.Background = new SolidColorBrush(Colors.Red); label3_Copy2.Content = InputStatus[2].ToString(); } } private void bReadOp_Click(object sender, RoutedEventArgs e) { //读取输出线圈信号 bool[] OutputStatus = modbusClient.ReadCoils(8, 3); // MessageBox.Show(OutputStatus[0].ToString()); /// if (OutputStatus[0] == true) { label3_Copy9.Background = new SolidColorBrush(Colors.Green); label3_Copy9.Content = OutputStatus[0].ToString(); } else { label3_Copy9.Background = new SolidColorBrush(Colors.Red); label3_Copy9.Content = OutputStatus[0].ToString(); } /// if (OutputStatus[1] == true) { label3_Copy10.Background = new SolidColorBrush(Colors.Green); label3_Copy10.Content = OutputStatus[1].ToString(); } else { label3_Copy10.Background = new SolidColorBrush(Colors.Red); label3_Copy10.Content = OutputStatus[1].ToString(); } /// if (OutputStatus[2] == true) { label3_Copy11.Background = new SolidColorBrush(Colors.Green); label3_Copy11.Content = OutputStatus[2].ToString(); } else { label3_Copy11.Background = new SolidColorBrush(Colors.Red); label3_Copy11.Content = OutputStatus[2].ToString(); } } private void bWriteOpT_Click(object sender, RoutedEventArgs e) { //批量写输出信号 bool[] WriteCoilsT = { true,true,true }; modbusClient.WriteMultipleCoils(8, WriteCoilsT); label3_Copy9.Background = new SolidColorBrush(Colors.Green); label3_Copy9.Content = "TRUE"; label3_Copy10.Background = new SolidColorBrush(Colors.Green); label3_Copy10.Content = "TRUE"; label3_Copy11.Background = new SolidColorBrush(Colors.Green); label3_Copy11.Content = "TRUE"; } private void bWriteOp_Click(object sender, RoutedEventArgs e) { //批量写输出信号 bool[] WriteCoilsT = { false, false, false }; modbusClient.WriteMultipleCoils(8, WriteCoilsT); label3_Copy9.Background = new SolidColorBrush(Colors.Red); label3_Copy9.Content = "FALSE"; label3_Copy10.Background = new SolidColorBrush(Colors.Red); label3_Copy10.Content = "FALSE"; label3_Copy11.Background = new SolidColorBrush(Colors.Red); label3_Copy11.Content = "FALSE"; } private void ReadVr_Click(object sender, RoutedEventArgs e) { //读取多个寄存器的值 int[] ReadVrVal = modbusClient.ReadHoldingRegisters(0, 3); textBoxVr0.Text = ReadVrVal[0].ToString(); textBoxVr1.Text = ReadVrVal[1].ToString(); textBoxVr2.Text = ReadVrVal[2].ToString(); } private void WriteVr_Click(object sender, RoutedEventArgs e) { if (textBoxVr0.Text != null && Regex.IsMatch(textBoxVr0.Text, @"^[+-]?\d*[.]?\d*$")) { //写多个寄存器的值 int[] WriteVrVal = { int.Parse(textBoxVr0.Text.Trim()), int.Parse(textBoxVr1.Text.Trim()), int.Parse(textBoxVr2.Text.Trim()) }; modbusClient.WriteMultipleRegisters(0, WriteVrVal); MessageBox.Show("写入成功"); } else { MessageBox.Show("非法值"); textBoxVr0.Text = "0"; textBoxVr1.Text = "0"; textBoxVr2.Text = "0"; } } } }
代码有很多不规范的地方,由于刚刚入门C#,很多类库第一次接触,本想做的完善点但实属心有余而语言不熟(正在不断的学习中...),以上仅作参考。
完整代码github地址:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号