
第一步,在命令行下面输入cameraCalibrator,启动MATLAB相机标定、相机矫正界面
cameraCalibrator

第二步:拍照。如果你是做相机标定,你应该知道,你需要一些calibration template来拍照,可以参考大多数相机标定的文章(如Tsai的文章),常用的是黑白方块,自己打印机打印或者从网上购买(高精度)。然后从不同角度拍照:

第三步:导入相机拍的图片,点击界面上的"Add Images"按钮,你可以从不同文件夹选择图片。图片选择好以后,你需要告诉程序,你的每个方块的实际大小,可以已厘米等单位。

点击Ok按钮以后,程序会自动导入图片,并且进行图像处理(提取方块的位置)。当然,有可能你的某些照片不符合要求,程序会自动过滤掉不符合条件的图片(是不是很聪明?),比如下图告诉你:你选择的13个图片里,其中8个符合要求,5个不符合要求。

第四步:开始MATLAB相机标定,点击界面上的标定按钮:

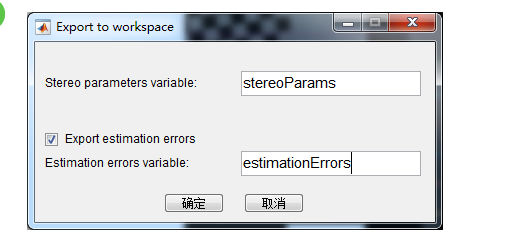
点击“Exprot Camera Parameters”按钮,
保存标定的参数数据;
如图所示:
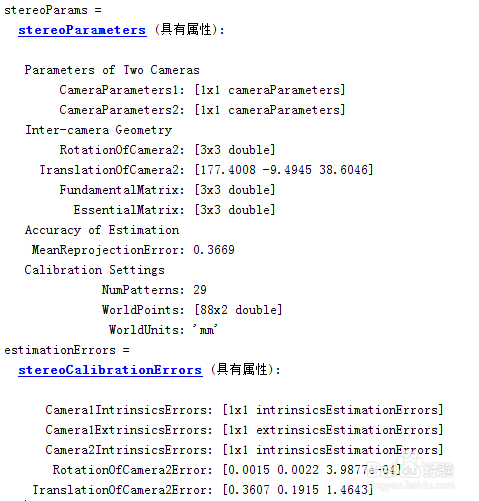
标定结果分析:
对于双目标定数据,
通常只需要得到:
相机内参:Intrinsic Matrix;
畸变:径向畸变+切向畸变;[k1,k2,k3,p1,p2]
重投影平均误差;
相机外参:旋转矩阵3*3 +平移向量3*1
根据你的需求,界面上提供了不同选项,来让你获取相机标定、相机矫正的内部和外部参数。
详细相机标定过程请参考:http://www.mathworks.com/help/vision/ug/find-camera-parameters-with-the-camera-calibrator.html#btxr8c_-2
MATLAB相机标定教学视频: http://www.mathworks.com/videos/camera-calibration-with-matlab-81233.html
详细相机标定过程请参考:http://www.mathworks.com/help/vi ... ator.html#btxr8c_-2
MATLAB相机标定教学视频: http://www.mathworks.com/videos/ ... h-matlab-81233.html
以上是参考所得。
