


1、先找到官方标定程序(OpenCV解压盘,程序路径....\opencv\sources\samples\cpp);

2.在vs中创建项目,然后添加c++源文件,再把stereo_calib.cpp文件中的内容粘贴到新建的源文件。

3、把官方自带的28张标定图片以及stereo_calib.xml(这是一个包含需要标定的图片的列表)这个文件复制到VS工程目录中 (图片路径 ...\opencv\sources\samples\data)
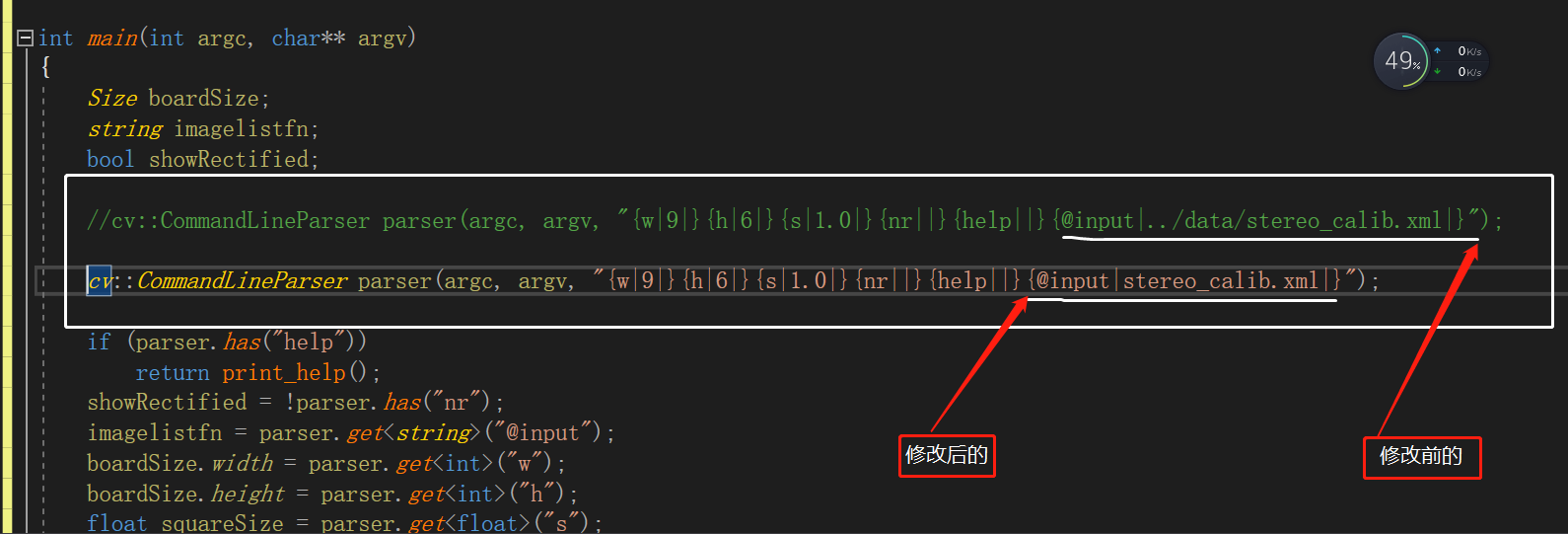
4、直接运行时不可以的,需要修改main()函数中的参数,如图所示;(修改源程序 图片名称“stereo_calib.xml”文件 路径)
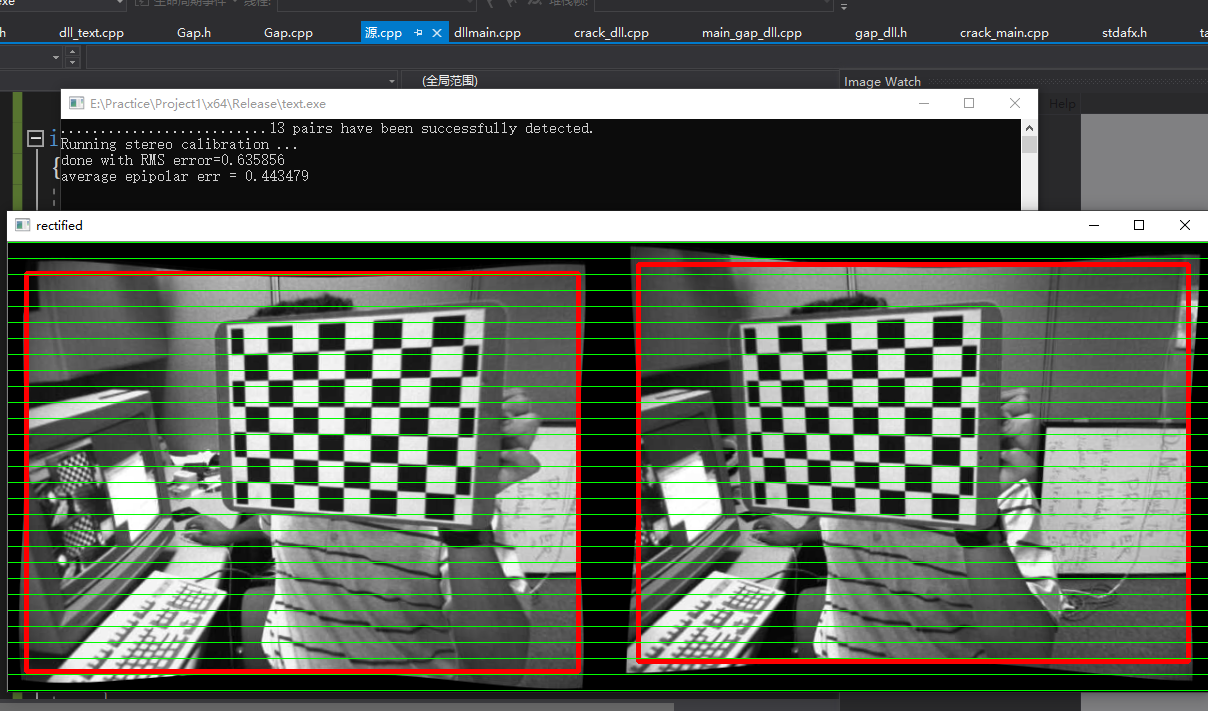
5、到此结束,标定的前期工作就做完了,可以开始运行程序了。运行后界面入下;
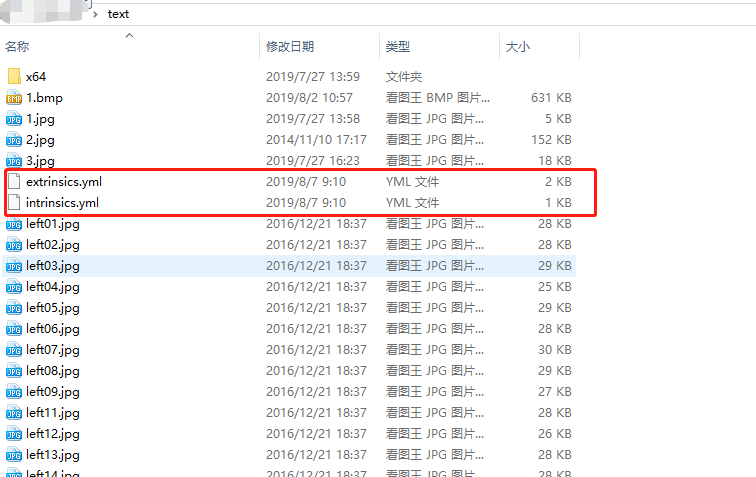
6、标定完后VS工程目录下会多了两个文件extrinsics.yml(相机外参)和intrinsics.yml相机内参),做立体匹配时需要用。
有不明白的地方,欢迎交流!

