
UR机械臂的TCP/IP控制
最近研究了一下UR5机械臂的控制,由于供应商提供的实物是用自带的示教器来编程控制,感觉很不方便。于是我研究了一下UR5机械臂的资料,决定用Qt写个控制软件,将示教器上面的控制界面移植过来,这样就可以用电脑通过无线网络远程控制机械臂了,下面介绍本人做的控制软件。
文章最后附上软件下载地址。
此图是示教器屏幕上的控制界面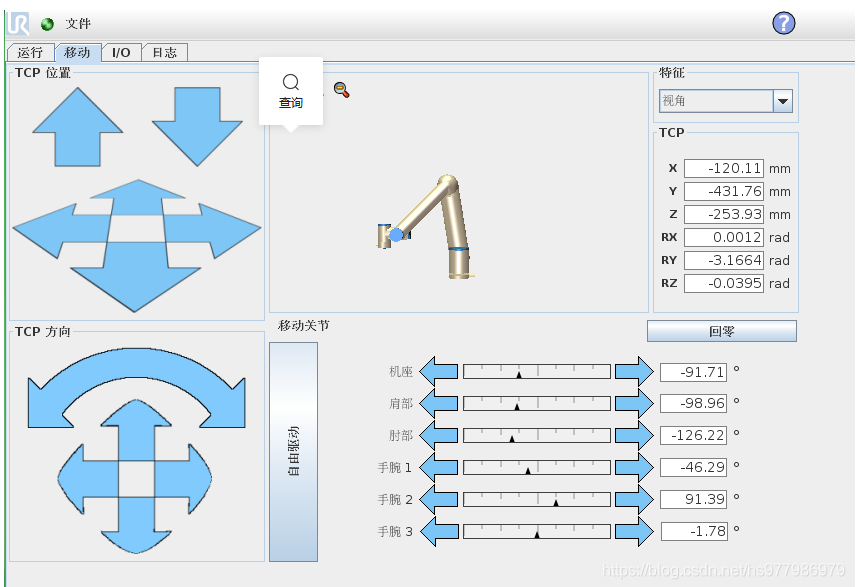
此图为本人用Qt写的UR5机械臂控制软件

演示视频:
B站完整演示视频:https://www.bilibili.com/video/BV1hv4y1N7pS?spm_id_from=333.999.0.0
从上面两图对比中可以看出,我写的控制软件进行了功能扩展,示教器上面的控制按钮此软件都包含。不仅如此该软件还具有调试功能,左边的输入输出对话框可以收发数据。输入对话框右边竖排按钮可以添加程序,通过任意组合可以编出简单的控制程序,按发送按钮就可以控制机械臂运动了。中间的控制区域额外添加了一些按钮,比如上电,断电,关机,解除制动,进入示教模式,解除保护停止等功能。右边的区域主要是机械臂的状态显示,比如
X,Y,Z,Rx,Ry,Rz,以及各关节角度信息,此区域中间位置还具有机械臂数据反馈信息,比如电压,电流,机器人模式,安全模式等,
下面是细节介绍。
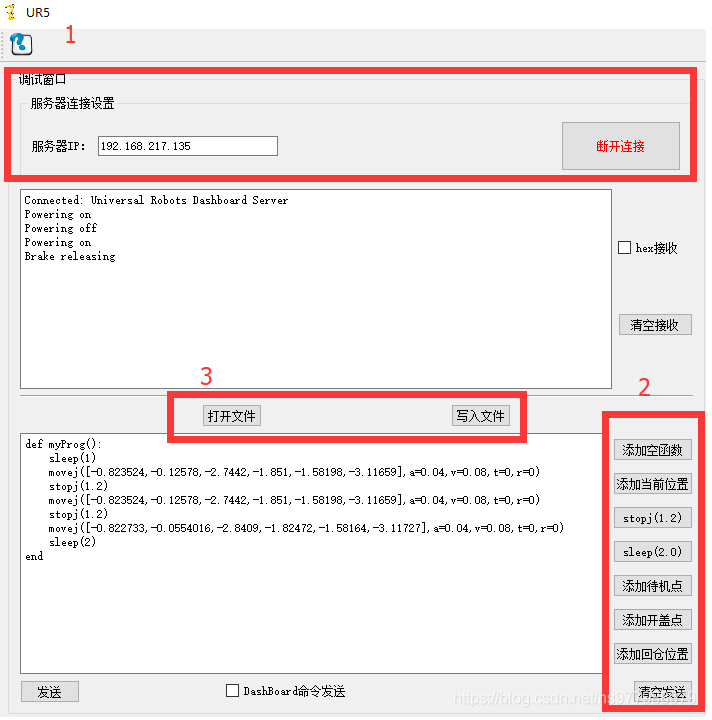
红框1:该区域是IP设置区域,输入机械臂IP联通后,“开始连接”按钮变为红色。
红框2:该区域竖排按钮可以组合使用编写简单程序,如输入对话框里面程序。
红框3:可以通过“打开文件”按钮找到需要打开的文件(.txt),并将内容显示在输入对话框。“写入文件”可以将写好的程序保存到指定的文件(.txt)。

此区域为控制按钮区域,带箭头的控制按钮和示教器的控制按钮一样,都是按压式的,只有按住不动的情况下机械臂才会运动,松开自动停止,每个按钮的控制方向完全和示教器上的一样。此外最底下还有进度条控制运动速度和加速度。点击“示教模式”可以手动推动机械臂到任意位置,点击任意其它按钮解除示教模式,如果出现机械臂保护停止状态,“解除保护停止”按钮变为红色,点击此按钮可解除报警继续控制。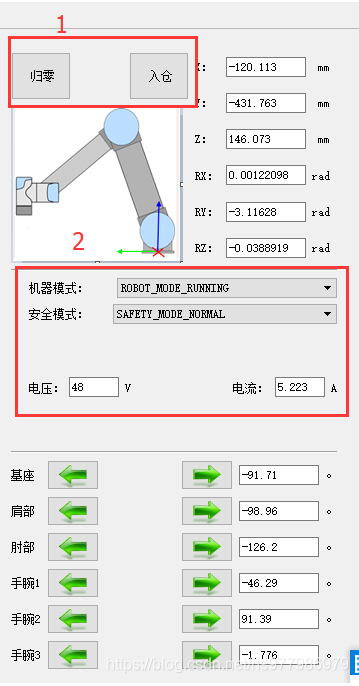
此区域为机械臂状态信息显示,下方关节状态区域可以手动点击箭头按钮,对各关节进行控制。中间红色框区域也是机械臂的实时状态信息,如果机械臂出现断电,保护性停止等情况,都会有相应的报警提示,并且可以根据提示解除相关报警。如下图所示。
机器人出现保护性停止后,安全模式显示报警信息,“解除保护停止”按钮变为红色,点击此按钮,即可解除报警。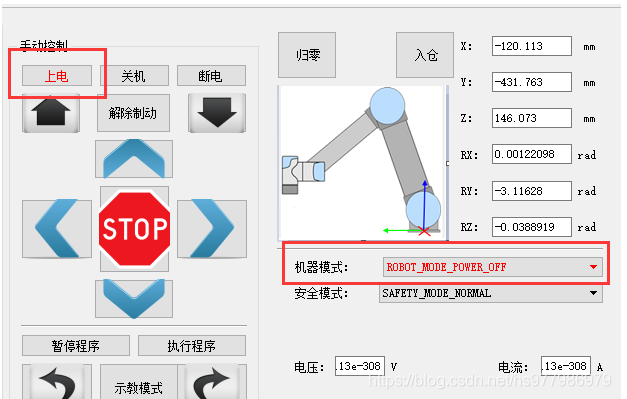
机械臂断电后机器模式显示报警,上电按钮变为红色,点击此按钮可以上电。
以上就是整个软件的介绍,此软件经过在实体UR机械臂上实测,稳定有效,也可以在URSim仿真器上测试运行。后续可以根据需要添加更多的功能。
**
**欢迎感兴趣的各位朋友一起交流学习,QQ:2284108152.
软件下载:
链接:https://pan.baidu.com/s/1TtKnHkNqmMMIPeFnAWYxmQ
提取码:1234

 浙公网安备 33010602011771号
浙公网安备 33010602011771号