DenseNet笔记
一、DenseNet的优点
- 减轻梯度消失问题
- 加强特征的传递
- 充分利用特征
- 减少了参数量
二、网络结构公式
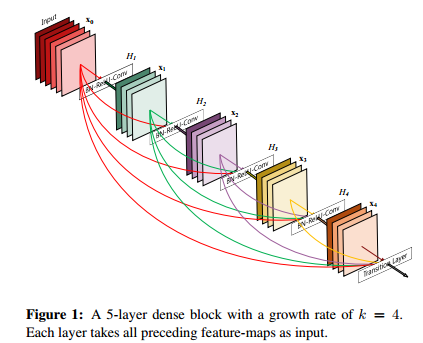
对于每一个DenseBlock中的每一个层,

[x0,x1,…,xl-1]表示将0到l-1层的输出feature map做concatenation。concatenation是做通道的合并,就像Inception那样。而前面resnet是做值的相加,通道数是不变的。Hl包括BN,ReLU和3*3的卷积。
而在ResNet中的每一个残差块,

三、Growth Rate
指的是DenseBlock中每一个非线性变换Hl(BN,ReLU和3*3的卷积)的输出,这个输出与输入Concate.一个DenseBlock的输出=输入+Hl数×growth_rate。在要给DenseBlock中,Feature Map的size保持不变。
四、Bottleneck
这个组件位于DenseBlock中,当一个DenseBlock包含的非线性变换Hl较多时(如nHl=48),此时的grow rate为k=32,那么第48层的输入变成input+47×32,这是一个很大的数,如果不用bottleneck进行降维,那么计算量很大。
因此,使用4×k个1x1卷积进行降维。使得3×3线性变换的输入通道变成4×k。同时,bottleneck起到特征融合的效果。
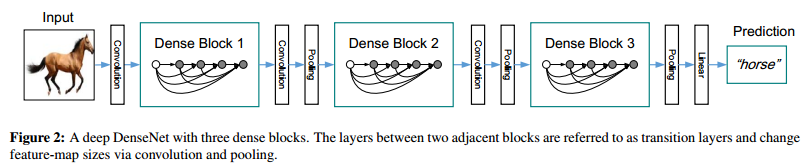
五、Transition
这个组件位于DenseBlock之间,使用1×1卷积进行降维,降维后的通道数为input_channels*reduction. 参数reduction默认为0.5,后接池化层进行下采样,减小Feature Map 分辨率。
六、网络结构
七、代码实现(Pytorch)
import torch import torch.nn as nn import torch.nn.functional as F import math class Bottleneck(nn.Module): def __init__(self,nChannels,growthRate): super(Bottleneck,self).__init__() interChannels = 4*growthRate self.bn1 = nn.BatchNorm2d(nChannels) self.conv1 = nn.Conv2d(nChannels,interChannels,kernel_size=1, stride=1,bias=False) self.bn2 = nn.BatchNorm2d(interChannels) self.conv2 = nn.Conv2d(interChannels,growthRate,kernel_size=3, stride=1,padding=1,bias=False) def forward(self, *input): #先进行BN(pytorch的BN已经包含了Scale),然后进行relu,conv1起到bottleneck的作用 out = self.conv1(F.relu(self.bn1(input))) out = self.conv2(F.relu(self.bn2(out))) out = torch.cat(input,out) return out class SingleLayer(nn.Module): def __init__(self,nChannels,growthRate): super(SingleLayer,self).__init__() self.bn1 = nn.BatchNorm2d(nChannels) self.conv1 = nn.Conv2d(nChannels,growthRate,kernel_size=3, padding=1,bias=False) def forward(self, *input): out = self.conv1(F.relu(self.bn1(input))) out = torch.cat(input,out) return out class Transition(nn.Module): def __int__(self,nChannels,nOutChannels): super(Transition,self).__init__() self.bn1 = nn.BatchNorm2d(nChannels) self.conv1 = nn.Conv2d(nChannels,nOutChannels,kernel_size=1,bias=False) def forward(self, *input): out = self.conv1(F.relu(self.bn1(input))) out = F.avg_pool2d(out,2) return out class DenseNet(nn.Module): def __init__(self,growthRate,depth,reduction,nClasses,bottleneck): super(DenseNet,self).__init__() #DenseBlock中非线性变换模块的个数 nNoneLinears = (depth-4)//3 if bottleneck: nNoneLinears //=2 nChannels = 2*growthRate self.conv1 = nn.Conv2d(3,nChannels,kernel_size=3,padding=1,bias=False) self.denseblock1 = self._make_dense(nChannels,growthRate,nNoneLinears,bottleneck) nChannels += nNoneLinears*growthRate nOutChannels = int(math.floor(nChannels*reduction)) #向下取整 self.transition1 = Transition(nChannels,nOutChannels) nChannels = nOutChannels self.denseblock2 = self._make_dense(nChannels,growthRate,nNoneLinears,bottleneck) nChannels += nNoneLinears*growthRate nOutChannels = int(math.floor(nChannels*reduction)) self.transition2 = Transition(nChannels, nOutChannels) nChannels = nOutChannels self.denseblock3 = self._make_dense(nChannels, growthRate, nNoneLinears, bottleneck) nChannels += nNoneLinears * growthRate self.bn1 = nn.BatchNorm2d(nChannels) self.fc = nn.Linear(nChannels,nClasses) #参数初始化 for m in self.modules(): if isinstance(m,nn.Conv2d): n = m.kernel_size[0]*m.kernel_size[1]*m.out_channels m.weight.data.normal_(0,math.sqrt(2./n)) elif isinstance(m,nn.BatchNorm2d): m.weight.data.fill_(1) m.bias.data.zero_() elif isinstance(m,nn.Linear): m.bias.data.zero_() def _make_dense(self,nChannels,growthRate,nDenseBlocks,bottleneck): layers = [] for i in range(int(nDenseBlocks)): if bottleneck: layers.append(Bottleneck(nChannels,growthRate)) else: layers.append(SingleLayer(nChannels,growthRate)) nChannels+=growthRate return nn.Sequential(*layers) def forward(self, *input): out = self.conv1(input) out = self.transition1(self.denseblock1(out)) out = self.transition2(self.denseblock2(out)) out = self.denseblock3(out) out = torch.squeeze(F.avg_pool2d(F.relu(self.bn1(out)),8)) out = F.log_softmax(self.fc(out)) return out
手与大脑的距离决定了理想与现实的相似度

 浙公网安备 33010602011771号
浙公网安备 33010602011771号