学习笔记5
苏格拉底挑战

第十一章 EXT2文件系统
一.知识点归纳
(一)EXT2文件系统数据结构
1.通过 mkfs 创建虚拟磁盘
在 Linux 下,命令
mke2fs [-b blksize -N ninodes] device nblocks
在设备上创建一个带有 nblocks 个块(每个块大小为 blksize 字节)和 ninodes 个索引节点的 EXT2 文件系统。设备可以是真实设备,也可以是虚拟磁盘文件。如果未指定 blksize,则默认块大小为 1KB。如果未指定 ninodes,mke2fs 将根据 nblocks 计算一个默认的 ninodes 数。
例如:
dd if=/dev/zero of=vdisk bs=1024 count=1440
mke2fs vdisk 1440
可在一个名为 vdisk 的虚拟磁盘文件上创建一个 EXT2 文件系统,有 1440 个大小为 1KB 的块。
2.超级块
- Block#1:超级块
- 超级块(Super Block)描述整个分区的文件系统信息,如inode/block的大小、总量、使用量、剩余量,以及文件系统的格式与相关信息。超级块在每个块组的开头都有一份拷贝(第一个块组必须有,后面的块组可以没有)。
- 超级块记录的信息有:
- block 与 inode 的总量(分区内所有Block Group的block和inode总量);
- 未使用与已使用的 inode / block 数量;
- block 与 inode 的大小 (block 为 1, 2, 4K,inode 为 128 bytes);
- filesystem 的挂载时间、最近一次写入数据的时间、最近一次检验磁盘 (fsck) 的时间等文件系统的相关信息;
- 一个 valid bit 数值,若此文件系统已被挂载,则 valid bit 为 0 ,若未被挂载,则 valid bit 为 1 。
struct ext2_guper_block {
u32 s_inodes_count; /* Inodes count */
u32 s_blocks_count; /* Blocks count*/
u32 s_r_blocks_count; /* Reserved blocks count */
u32 s_free_blocks_count; / * Free blocks count */
u32 s_free_inodes_count; /* Free inodes count */
u32 s_first__data_blook; /* First Data Block */
u32 s_log_block_size; /* Block size */
u32 s_log_cluster_size; /* Allocation cluster size */
u32 s_blocks_per_group; /* # Blocks per group*/
u32 s_clusters_per_group; /*# Fragments per group */
u32 s_inodes_per_group; /* # Inodes per group*/
u32 s_mtime;u32 s_wtime; /* Mount time */
u16 s_mnt_count; /* Write time */
s16 s_max_mnt_count; /_Mount_count/L
u16 8_magic; /* Magic signature */
// more non-essential fields
u16 s_inode_size; /* size of inode structure*/
}
3.块组描述符
- Block#2:块组描述符块
- 块组描述符块(GD)由很多块组描述符组成,整个分区分成多个块组就对应有多少个块组描述符。
- 每个块组描述符存储一个块组的描述信息,如在这个块组中从哪里开始是inode Table,从哪里开始是Data Blocks,空闲的inode和数据块还有多少个等等。块组描述符在每个块组的开头都有一份拷贝。
struct ext2_group_desc {
u32 bg_block_bitmap; // Bmap block number
u32 bg_inode_bitmap; // Imap block number
u32 bg_inode_table; // Inodes begin block number
u16 bg_free_blocks_count; // THESE are OBVIOUS
u16 bg_free_inodes_count;
ul6 bg_used_dirs_count;
u16 bg_pad; // ignore these
u32 bg_reserved[3];
};
4.块和索引节点位图
- Block#8:块位图
- 块位图(Block Bitmap)用来描述整个块组中哪些块已用哪些块空闲。块位图本身占一个块,其中的每个bit代表本块组的一个block,这个bit为1代表该块已用,为0表示空闲可用。假设格式化时block大小为1KB,这样大小的一个块位图就可以表示1024*8个块的占用情况,因此一个块组最多可以有10248个块。
- Block#9:索引节点位图
- inode位图(inode Bitmap)和块位图类似,本身占一个块,其中每个bit表示一个inode是否空闲可用。 Inode bitmap的作用是记录block group中Inode区域的使用情况,Ext文件系统中一个block group中可以有16384个Inode,代表着这个Ext文件系统中一个block group最多可以描述16384个文件。
5.索引节点
- Block#10:索引(开始)节点块
- inode表(inode Table)由一个块组中的所有inode组成。一个文件除了数据需要存储之外,一些描述信息也需要存储,如文件类型,权限,文件大小,创建、修改、访问时间等,这些信息存在inode中而不是数据块中。inode表占多少个块在格式化时就要写入块组描述符中。 在Ext2/Ext3文件系统中,每个文件在磁盘上的位置都由文件系统block group中的一个Inode指针进行索引,Inode将会把具体的位置指向一些真正记录文件数据的block块,需要注意的是这些block可能和Inode同属于一个block group也可能分属于不同的block group。我们把文件系统上这些真实记录文件数据的block称为Data blocks。
struct ext2_inode {
u16 i_mode; // 16 bits=|tttt |ugs|rwx|rwx|rwxl
ul6 i_uid; // owner uid
u32 i_size; // file size in bytes
u32 i_atime; // time fields in seconds
u32 1_ctime; // since 00:00:00,1-1-1970
u32 i_mtime;
u32 i_dtime;
i_gid; // group ID u16
u16 i_links_count; // hard-link count
u32 i_blocks;u32 i_flags; // number of 512-byte sectors
u32 i_reservedl; // IGNORE // IGNORE
u32 i_block[15]; // See details below
u32 i_pad[7]; // for inode size = 128 bytes
}
6.目录条目
目录包含 dir_entry 结构,即
struct ext2_dir_entry_2(){
u32 inode;
u16 rec_len;
u8 name_len;
u8 file_type;
char name[EXT2_NAME_LEN];
};
dir_entry 是一种可扩充结构。名称包含 1 到 255 个字符,不含终止 NULL。所以 dir_entry 的 rec_len 也各不相同。
(二)邮差算法
邮差算法的意思是:一个城市有 M 个街区,编号从 0 到 M-1 ,每个街区又有 N 座房子,编号从 0 到 N-1。我们可以用 BA =(街区,房子)表示每一栋房子的位置,同时我们也可以使用线性方法将房子编为 0,1,...,N 等。如何进行线性地址 LA 与街区地址 BA 的相互转换?如果都从 0 开始计数,转换就会非常简单。
Linear_address LA = N*block + house;
Block_address BA = (LA / N, LA % N);
注意,只有都从 0 开始计数,转换才有效。如果有些条目不是从 0 开始计数的,则不能直接在转换公式中使用。为方便表述,我们将这种转换方法称为邮差算法。下面给出邮差算法的几种应用。
1.C语言中的 Test-Set-Clear 位
在标准C语言程序中,最小的可寻址单元是一个字符或字节。在一系列位组成的位图中,通常需要对位进行操作。考虑字符buf[1024],它有1024个字节,用buf[i]表示,其中i=0,1,...,1023。它还有8192个位,编号为0,1,2,···,8191。
struct bits{
unsigned int bit0 : 1; // bit0 field is a single bit
unsigned int bit123 : 3; // bit123 field is a range of 3 bits
unsigned int otherbits :27; // other bits field has 27 bits
unsigned int bit31 : 1; // bit31 is the highest bit
}var;
2.将索引节点号转换为磁盘上的索引节点
在 EXT2文件系统中,每个文件都有一个唯一的索引节点结构。在文件系统磁盘上,索引节点从inode table块开始。每个磁盘块包含
INODES_PER_BLOCK = BLoCK_SIZE/sizeof(INODE)
个索引节点。每个索引节点都有一个唯一的索引节点号,ino=1,2,…,从1开始线性计数。已知一个ino,如1234,那么哪个磁盘块包含该索引节点,以及哪个索引节点在该块中呢?我们需要知道磁盘块号,因为需要通过块来读/写一个真正的磁盘。
blcok = (info - 1) * INODES_PER_BLCOK + inode_table;
inode = (info - 1) % INODES_PER_BLCOK
(三)编程示例
1.显示超级块
以下C程序显示了EXT2文件系统的超级块。基本方法如下。
(1) 打开虚拟磁盘读取:int fd =open(“vidsk”.O_RDONLY)。
(2) 将超级块(Block#1或1KB的1024偏移量位置)读入char buf[1024]中。
(3) 让 ext2_super_block *sp 结构体指向buf[]。然后,利用 sp->field 访问超级块结构体的各个字段。
2.显示位图
3.显示根索引节点
4.显示目录条目
(四)遍历 EXT2 文件系统树
1.遍历算法
(1)读取超级块。检查幻数 s_magic(0xEF53),验证它确实是 EXT2 FS。
(2)读取块组描述符块(1 + s_first_data_block),以访问组0描述符。从块组描述符的bg_inode_table条目中找到索引节点的起始块编号,并将其称为 InodesBeginBlock。
(3)读取 InodeBeginBlock,获取/的索引节点,即 INODE#2。
(4)将路径名标记为组件字符串,假设组件数量为n。例如,如果路径名 =/a/b/c,则组件字符串是"a""b""c",其中n=3。用name[0],name[1],…,name[n-1]来表示组件。
(5)从(3)中的根索引节点开始,在其数据块中搜索 name[0]。为简单起见,我们可以假设某个目录中的条目数量很少,因此一个目录索引节点只有12个直接数据块。有了这个假设,就可以在12个(非零)直接块中搜索 name[0]。目录索引节点的每个数据块都包含以下形式的 dir_entry 结构体;
[ino rec_len name_len NAME] [ino rec_len name_len NAME]....
其中 NAME 是一系列 nlen 字符,不含终止 NULL。对于每个数据块,将该块读入内存并使用 dir_entry *dp 指向加载的数据块。然后使用 name_len将 NAME 提取为字符串,并与 name[0] 进行比较。如果它们不匹配,则通过以下代码转到下一个 dir_entry:
dp =(dir_entry*)((char *)dp + dp->rec_len);
继续搜索。如果存在 name[0],则可以找到它的 dir_entry,从而找到它的索引节点号。
(6)使用索引节点号ino来定位相应的索引节点。回想前面的内容,ino 从1开始计数。使用邮差算法计算包含索引节点的磁盘块及其在该块中的偏移量。
blk =(ino - 1) / INODE8_PER_BLOCK + InodesBeginBlock;
offset = (ino - 1) % INODES_PER_BLOCK;
然后在索引节点中读取/a,从中确定它是否是一个目录(DIR)。如果/a不是目录,则不能有/a/b,因此搜索失败。如果它是目录,并且有更多需要搜索的组件,那么继续搜索下一个组件 name[1]。现在的问题是∶在索引节点中搜索/a的 name[1],与第(5)步完全相同。
(7)由于(5)~(6)步将会重复n次,所以最好编写一个搜索函数∶
u32 search (INODE *inodePtr, char *name)
{
// search for name in the data blocks of current DIR inode
// if found, return its ino; else return 0 )
}
然后我们只需调用 search()n次,如下所示。
Assume:n,name[0],....,name[n-1] are globals
INODE *ip points at INODE of /
for(i=0; i<n; i++)
{
ino = search(ip, name[4])
if(!ino){ // can't find name[i], exit;}
use ino to zead in INODE and let ip point to INODE
}
如果搜索循环成功结束,ip必须指向路径名的索引节点。遍历有多个组的大型 EXT2/3 文件系统也是类似操作。
4.将路径名转换为索引节点
5.显示索引节点磁盘块
(五)EXT2 文件系统的实现
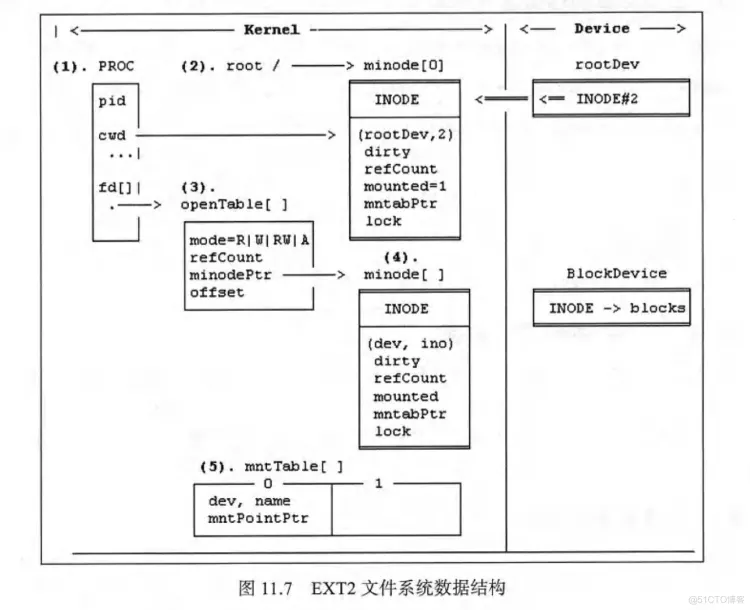
1.文件系统的结构
(1)当前运行进程的PROC结构体;
(2)文件系统的根指针;
(3)一个openTable条目;
(4)内存索引节点;
(5)已挂载的文件系统表。
2.文件系统的级别
第1级别实现了基本文件系统树,以实现指定函数,第2级别实现了文件内容的读/写函数,第3级别实现了文件系统的挂载、卸载和文件保护。
(六)基本文件系统
1.type.h 文件
这类文件包含EXT2文件系统的数据结构类型,比如超块、组描述符、索引节点和目录条目结构。此外,它还包含打开文件表、挂载表、PROC结构体和文件系统常数。
2.global.c 文件
这类文件包含文件系统的全局变量。全局变量的例子有:
MINODE minode [NMINODE]; // in memory INODEs
MTABLE mtable [NMTABLE]; // mount tables
OFT oft [NOFT]; // Opened file instance
PROC proc[NPROC]PROC ] // PROC structures
PROC *running; // current executing
3.实用程序函数
(1)get_block/put_block 函数
(2)iget(dev, ino) 函数
(3)The iput(INODE *mip) 函数
(4)getino() 函数
(5)getino()/iget()/iput()的使用
4.mount-root
- 如何执行ls
5.基本文件系统的实现
(七)文件系统的级别
文件系统的实现分为三个级别。每个级别处理文件系统的不同部分。这使得实现过程模块化,更容易理解。在文件系统的实现过程中,FS目录包含实现EXT2文件系统的文件。
1. 1级文件系统函数及其原理
- 1级文件系统函数的功能是文件和路径、创建和删除等较为直接和底层的相关的操作。
mkdir:mkdir创建一个带路径名的新目录。同时将目录的权限设置为 0755 ,即 rwxr_xr_x ,所有人可以访问和读写,其他人可以访问但是只能读取。
creat:creat创建一个空的普通文件。
rmdir:删除一个路径。
link:链接文件。
unlink:解除链接文件。
2. 2级文件系统函数及其原理
- 2级文件系统函数的功能常常是打开、读取文件、写入文件等对文件进行的操作。
open:打开文件。
lseek:将打开的文件描述符在OFT中的偏移量从文件开头或当前位置开始的字节位置。
close:关闭文件描述符。
3. 3级文件系统函数及其原理
- 3级文件系统函数进行文件系统的挂载、卸载和文件保护等。
mount:挂载。使用方法:
mount filesys mount_point
卸载:卸载已经挂载的文件系统。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号