Opencv 答题卡识别
Opencv 答题卡识别
大致步骤:
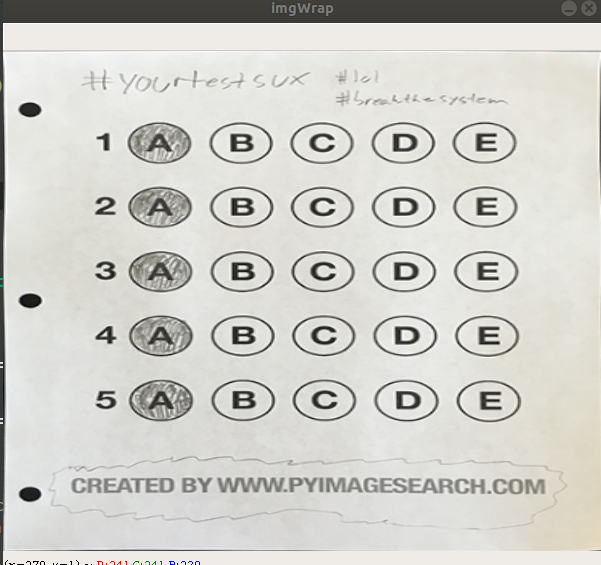
1 读取图像
2 预处理
2.1 灰度转换
2.2 高斯滤波
2.3 边缘检测
3 轮廓检测
4 透视变换
5 阈值化
6 再次轮廓检测,从结果中筛选出符合的选项
7 遍历每一组的轮廓(即每一行的)
8 遍历每一组的每一个轮廓,通过掩码计算结果,取最大的那个选项的下标(下标即代表选项A,B,C,D,E)
9 以此类推,遍历每一组
10 绘图,输出结果

图像预处理
#预处理1
def preprocess(img):
# 灰度转换
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯滤波
imgBlur = cv2.GaussianBlur(imgGray, (5, 5), 0)
cv2.imshow('imgBlur', imgBlur)
cv2.waitKey()
#边缘检测
imgEdge = cv2.Canny(imgBlur, 75, 200)
cv2.imshow('Canny', imgEdge)
cv2.waitKey()
#返回预处理的结果
return imgEdge
获取轮廓
def getCnts(img):
cnts = cv2.findContours(img.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]
docCnts = None
# 确保有轮廓
if len(cnts) > 0:
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
for c in cnts:
# 轮廓近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
if len(approx) == 4:
docCnts = approx
break
return docCnts
透视变换
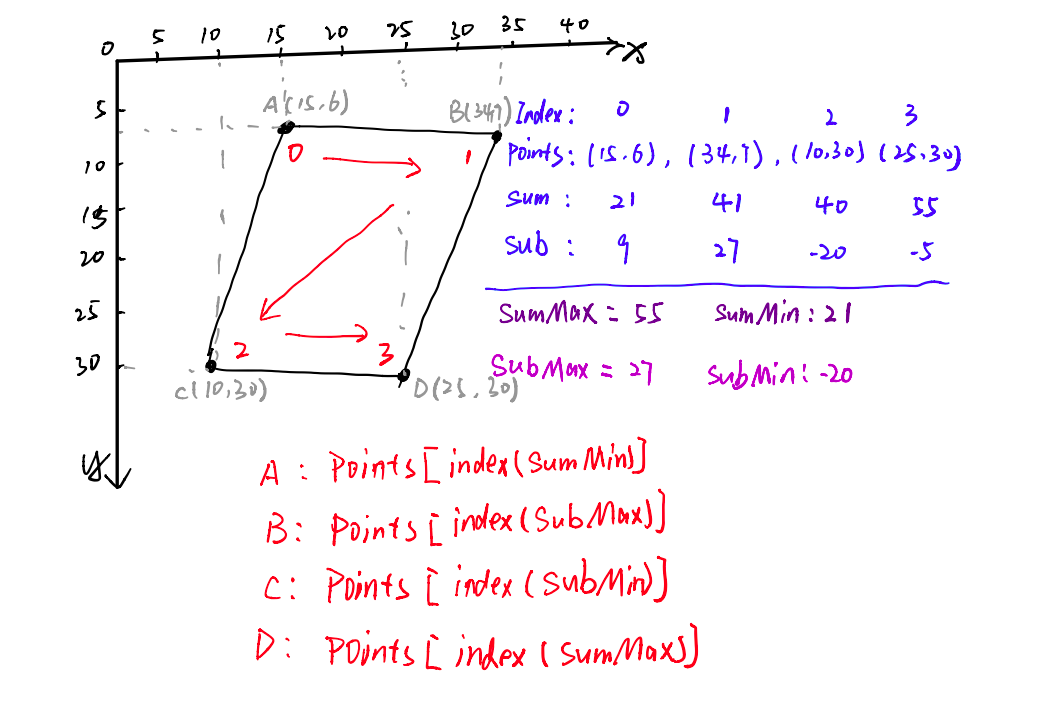
如图所示,通过这种计算方法可以得到A,B,C,D四个点的坐标。
而透视变换则需要图像的原始坐标和变换后的坐标,变换后的坐标可以设置为
[0, 0], [w - 1, 0],[0, h - 1], [w - 1, h - 1]
因此,透视变换的两个函数的代码:
一是获取原始坐标,二是进行透视变换,返回透视变换的结果
def four_point_transfrom(img, pts):
newPoints = []
sumPoints = []
subPoints = []
for x, y in pts:
sumPoints.append(x + y)
subPoints.append(x - y)
# get index
newPoints.append(pts[(np.argmin(sumPoints))])#0-A
newPoints.append(pts[(np.argmax(subPoints))])#1-B
newPoints.append(pts[(np.argmin(subPoints))])#2-C
newPoints.append(pts[(np.argmax(sumPoints))])#3-D
return newPoints
def getWrap(img, wraped, w, h):
src = np.array(wraped, dtype="float32")
dst = np.array([[0, 0],
[w - 1, 0],
[0, h - 1],
[w - 1, h - 1]], dtype="float32")
# src and dst must be type of float32
M = cv2.getPerspectiveTransform(src, dst)
imgRes = cv2.warpPerspective(img, M, (w, h))
return imgRes
阈值化,再次轮廓检测
# threshold
imgWrapGray = cv2.cvtColor(imgWrap, cv2.COLOR_BGR2GRAY)
imgThreshold = cv2.threshold(imgWrapGray, 20, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cv2.imshow("Wraped and threshold", imgThreshold)
cv2.waitKey()
# find Contours2
draw_cnts = imgWrap.copy()
thresh_cnts = cv2.findContours(imgThreshold.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(draw_cnts, thresh_cnts, -1, (0, 0, 255), 3)
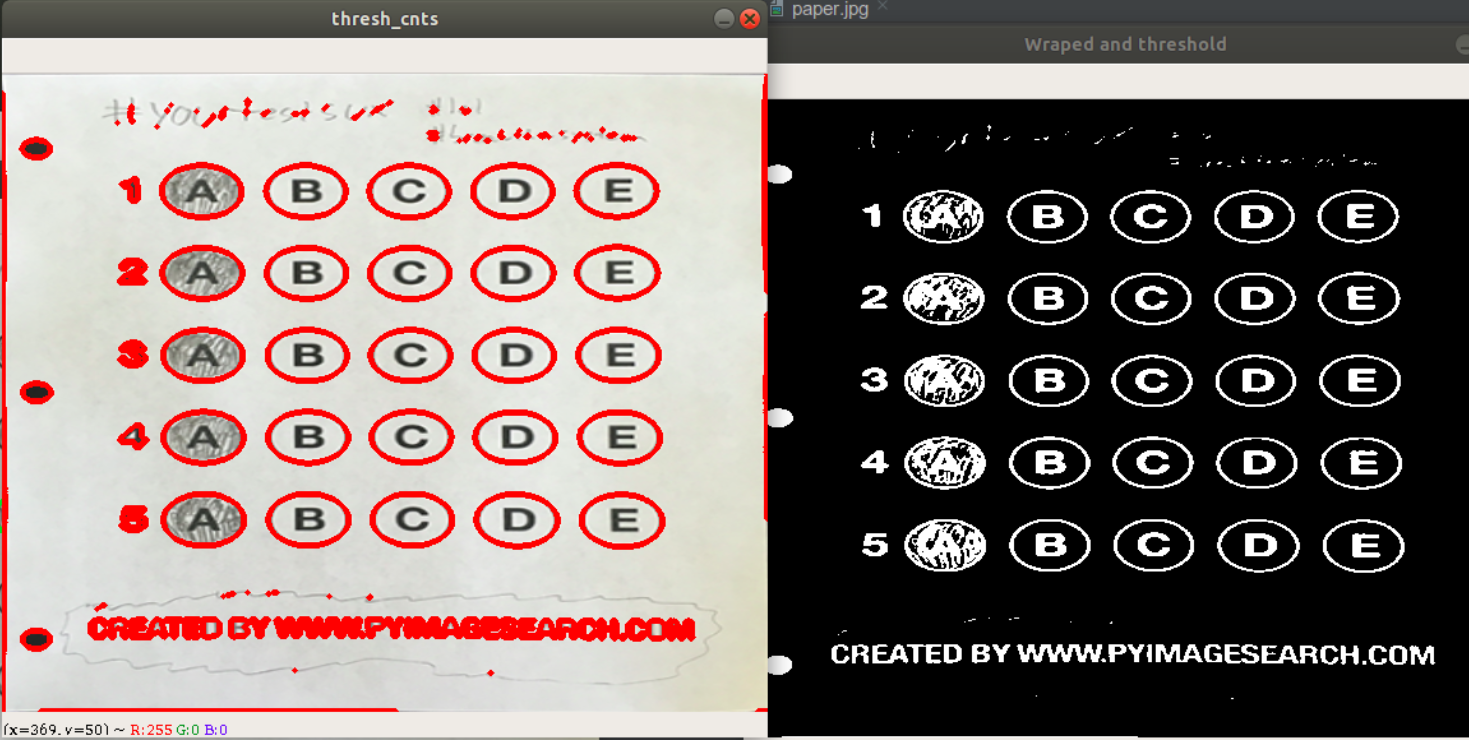
过滤圆形轮廓
# 遍历所有轮廓
for c in thresh_cnts:
# 计算比例和大小
(x, y, w, h) = cv2.boundingRect(c)
ar = w / float(h)
# 根据实际情况指定标准
if w >= 50 and h >= 40 and ar >= 0.9 and ar <= 1.6:
print('w=', w)
print('h=', h)
print('---------------')#打印出来看效果更直观
questionCnts.append(c)
对圆形轮廓继续遍历
对于同一个题目,x不同,y相同
对于不同题目的同一选项,x相同,y不同
因此,在排序时,先对每组进行排序,即,按y排序
questionCnts = sort_contours(questionCnts, method="top-to-bottom")[0]
其中
def sort_contours(cnts, method="left-to-right"):
reverse = False
i = 0
if method == "right-to-left" or method == "bottom-to-top":
reverse = True
if method == "top-to-bottom" or method == "bottom-to-top":
i = 1
boundingBoxes = [cv2.boundingRect(c) for c in cnts]
(cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),
key=lambda b: b[1][i], reverse=reverse))
return cnts, boundingBoxes
每排有5个选项,继续遍历每个选项
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# 排序-按x坐标,每次排一组,一组为5个
cnts = sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
# 遍历每一组结果
for (j, c) in enumerate(cnts):
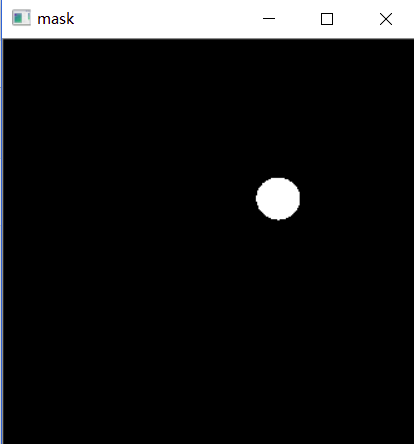
# 使用mask来判断结果
mask = np.zeros(imgThreshold.shape, dtype="uint8")
cv2.drawContours(mask, [c], -1, 255, -1) # -1表示填充,[c]表示当前选项的位置
# 通过计算非零点数量来算是否选择这个答案
mask = cv2.bitwise_and(imgThreshold, imgThreshold, mask=mask)#相当于只保留了白色的部分
total = cv2.countNonZero(mask)
print('total=',total)
#判断一下,如果他涂了两个选项,应该另外处理
if total>1000:
count += 1
if count< 2:
# 通过阈值判断,如果是第一次/当前值比上一次的大,则bubbled记录下来,直到最后bubbled就是一组中值最大的那个选项
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
else:
print('[Warning!]题目[%d]选择了多个选项'.format(j))
print('-------------------')
count=0
计算正确率,输出信息
这里答题卡是5行5列,利用计算出的5列的涂黑的值与真实答案的位置是否对应,对比正确答案,汇出图形。
# 对比正确答案
color = (0, 0, 255)
k = ANSWER_KEY[q]
# 判断正确,bubbled=(656,1),其中第二个依次表示A,B,C,D,E,
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
# 绘图
cv2.drawContours(imgWrap, [cnts[k]], -1, color, 3)
score = (correct / 5.0) * 100
#计算正确率,输出信息
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(imgWrap, "{:.2f}%".format(score), (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Original", imgOriginal)
cv2.imshow("Exam", imgWrap)
cv2.waitKey()
完整代码
import cv2
import numpy as np
# 正确答案
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}
def preprocess(img):
# RGB2GRAY
imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
imgBlur = cv2.GaussianBlur(imgGray, (5, 5), 0)
cv2.imshow('imgBlur', imgBlur)
cv2.waitKey()
imgEdge = cv2.Canny(imgBlur, 75, 200)
cv2.imshow('Canny', imgEdge)
cv2.waitKey()
return imgEdge
def getCnts(img):
cnts = cv2.findContours(img.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]
docCnts = None
# make sure detected
if len(cnts) > 0:
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
for c in cnts:
# appro
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
if len(approx) == 4:
docCnts = approx
break
return docCnts
def four_point_transfrom(img, pts):
newPoints = []
sumPoints = []
subPoints = []
for x, y in pts:
sumPoints.append(x + y)
subPoints.append(x - y)
# get index
newPoints.append(pts[(np.argmin(sumPoints))])
newPoints.append(pts[(np.argmax(subPoints))])
newPoints.append(pts[(np.argmin(subPoints))])
newPoints.append(pts[(np.argmax(sumPoints))])
return newPoints
def getWrap(img, wraped, w, h):
src = np.array(wraped, dtype="float32")
dst = np.array([[0, 0],
[w - 1, 0],
[0, h - 1],
[w - 1, h - 1]], dtype="float32")
# src and dst must be type of float32
M = cv2.getPerspectiveTransform(src, dst)
imgRes = cv2.warpPerspective(img, M, (w, h))
return imgRes
def sort_contours(cnts, method="left-to-right"):
reverse = False
i = 0
if method == "right-to-left" or method == "bottom-to-top":
reverse = True
if method == "top-to-bottom" or method == "bottom-to-top":
i = 1
boundingBoxes = [cv2.boundingRect(c) for c in cnts]
(cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),
key=lambda b: b[1][i], reverse=reverse))
return cnts, boundingBoxes
# read img
imgOriginal = cv2.imread('test_02.png')
imgOriginal = cv2.resize(imgOriginal, (500, 600))
w = imgOriginal.shape[0]
h = imgOriginal.shape[1]
cv2.imshow('imgOriginal', imgOriginal)
cv2.waitKey()
drawImg = imgOriginal.copy()
# preprocess
imgPre = preprocess(drawImg)
# contours
cur_cnts = getCnts(imgPre)
# imgPerspective
wraped = four_point_transfrom(imgPre, cur_cnts.reshape(4, 2))
imgWrap = getWrap(imgOriginal, wraped, w, h)
cv2.imshow('imgWrap', imgWrap)
cv2.waitKey()
# threshold
imgWrapGray = cv2.cvtColor(imgWrap, cv2.COLOR_BGR2GRAY)
imgThreshold = cv2.threshold(imgWrapGray, 20, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cv2.imshow("Wraped and threshold", imgThreshold)
cv2.waitKey()
# find Contours2
draw_cnts = imgWrap.copy()
thresh_cnts = cv2.findContours(imgThreshold.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(draw_cnts, thresh_cnts, -1, (0, 0, 255), 3)
cv2.imshow("thresh_cnts", draw_cnts)
cv2.waitKey()
questionCnts = []
# 过滤出圆形轮廓
# 遍历
for c in thresh_cnts:
# 计算比例和大小
(x, y, w, h) = cv2.boundingRect(c)
ar = w / float(h)
# 根据实际情况指定标准
if w >= 50 and h >= 40 and ar >= 0.9 and ar <= 1.6:
print('w=', w)# 1.(24,15)
print('h=', h)
print('---------------')
questionCnts.append(c)
# 对于同一个题,x相同,y不同
# 对于不同题,x不同,y相同
questionCnts = sort_contours(questionCnts, method="top-to-bottom")[0]
correct = 0
count = 0
# 每排有5个选项
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# 排序-按y坐标,每次排一组,一组为5个
cnts = sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
# 遍历每一组结果
for (j, c) in enumerate(cnts):
# 使用mask来判断结果
mask = np.zeros(imgThreshold.shape, dtype="uint8")
cv2.drawContours(mask, [c], -1, 255, -1) # -1表示填充,[c]表示当前选项的位置
# 通过计算非零点数量来算是否选择这个答案
mask = cv2.bitwise_and(imgThreshold, imgThreshold, mask=mask)#相当于只保留了白色的部分
total = cv2.countNonZero(mask)
print('total=',total)
#判断一下,如果他涂了两个选项,应该另外处理
if total>1000:
count += 1
if count< 2:
# 通过阈值判断,如果是第一次/当前值比上一次的大,则bubbled记录下来,直到最后bubbled就是一组中值最大的那个选项
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
else:
print('题目[%d]选项大于1'.format(j))
print('-------------------')
count=0
# 对比正确答案
color = (0, 0, 255)
k = ANSWER_KEY[q]
# 判断正确,bubbled=(656,1),其中第二个依次表示A,B,C,D,E,
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
# 绘图
cv2.drawContours(imgWrap, [cnts[k]], -1, color, 3)
score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(imgWrap, "{:.2f}%".format(score), (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Original", imgOriginal)
cv2.imshow("Exam", imgWrap)
cv2.waitKey()
踩坑记录
1是在进行透视变换时,src和dst必须为float32类型,否则会报错
2是在给src赋值的时候,不必一个个的赋值,可以直接使用np.array
src = np.array(wraped, dtype="float32")
3是获取图像的行和列不是C++中的rows和cols,而是
w = imgOriginal.shape[0]h = imgOriginal.shape[1]

