
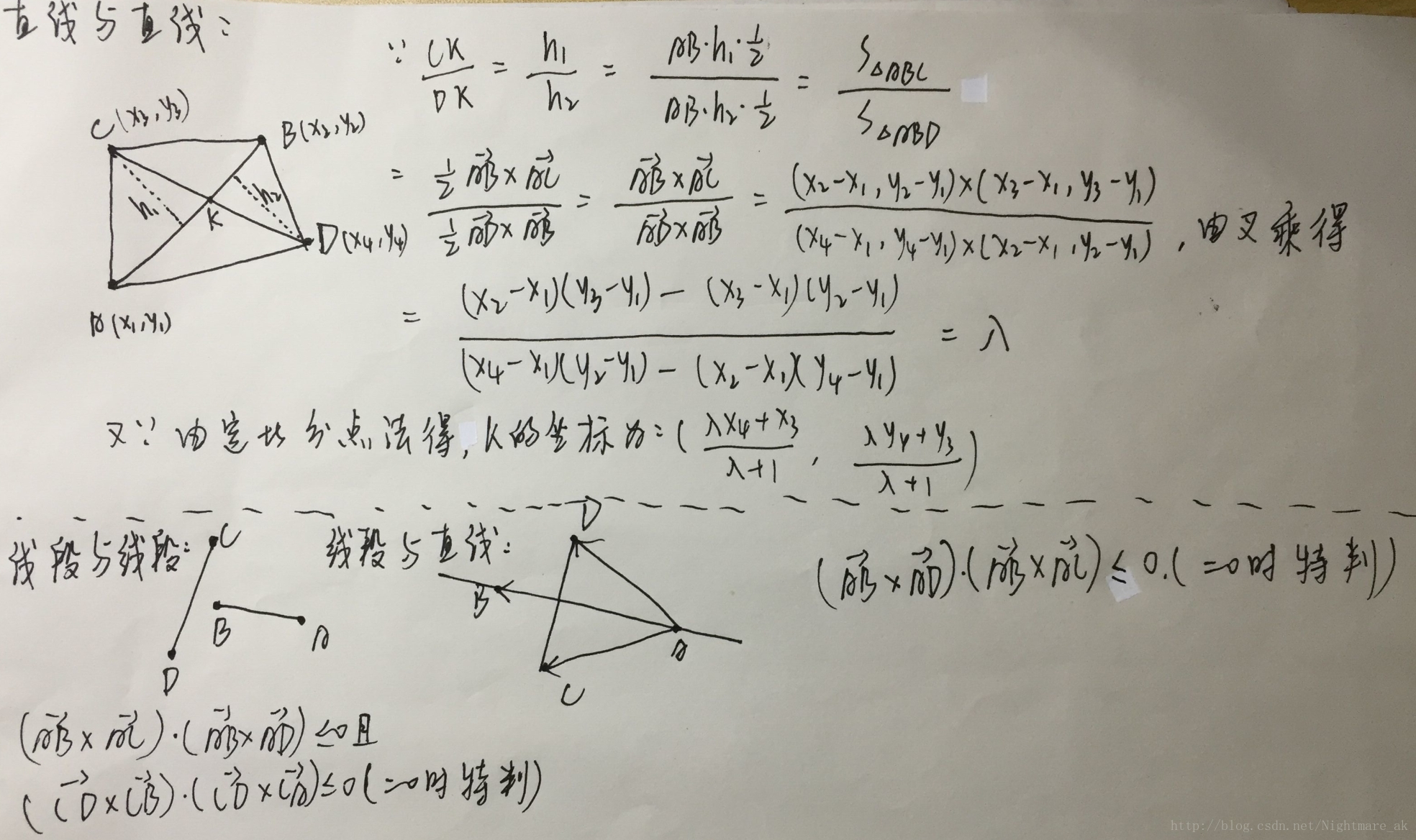
线段与线段交点的推导公式
知识储备:
叉乘:http://blog.csdn.net/nightmare_ak/article/details/77199940
定比分点法:http://blog.csdn.net/nightmare_ak/article/details/77917293
对于线段,只要先判断是否相交,就可以转化成直线求交点了
附模板:
#include<cstdio>
#include<algorithm>
#include<cmath>
using namespace std;
const int MAXN = 20 + 5;
struct Pos
{
double _x, _y;
Pos(double x=0.0,double y=0.0):_x(x),_y(y){}
}up[MAXN], down[MAXN];
double Cross(Pos p1, Pos p2, Pos p0)//叉乘
{
return (p1._x - p0._x)*(p2._y - p0._y) - (p2._x - p0._x)*(p1._y - p0._y);
}
bool isColide(Pos p1,Pos p2,Pos p3,Pos p4)//判断是否相交,直线p1p2与线段p3p4
{
double tmp = Cross(p2, p3, p1)*Cross(p2, p4, p1);
return tmp < 0.0 || fabs(tmp) < 1e-6;
}
Pos getPoint(Pos p1, Pos p2, Pos p3, Pos p4)//求出交点,直线(线段)p1p2与直线(线段)p3p4
{//t=lamta/(1+lamta)
double x1 = p1._x, y1 = p1._y;
double x2 = p2._x, y2 = p2._y;
double x3 = p3._x, y3 = p3._y;
double x4 = p4._x, y4 = p4._y;
double t = ((x2 - x1)*(y3 - y1) - (x3 - x1)*(y2 - y1)) / ((x2 - x1)*(y3 - y4) - (x3 - x4)*(y2 - y1));
return Pos(x3 + t*(x4 - x3), y3 + t*(y4 - y3));
}
int main()
{
return 0;
}
 浙公网安备 33010602011771号
浙公网安备 33010602011771号