ros nodelet 使用
ros nodelet能够加快高吞吐量程序运行速度比如点云
基本入门程序可以看
http://wiki.ros.org/nodelet/Tutorials/Porting%20nodes%20to%20nodelets
http://wiki.ros.org/nodelet
什么是nodelet,nodelet有什么用处
https://answers.ros.org/question/230972/what-is-a-nodelet/
代码框架:
class pcl_process_class {
class MyPointCloudGeneratorNodelet : public nodelet::Nodelet { // Subscriptions boost::shared_ptr<image_transport::ImageTransport> it_; image_transport::CameraSubscriber sub_depth_; int queue_size_; // Publications boost::mutex connect_mutex_; typedef sensor_msgs::PointCloud2 PointCloud; ros::Publisher pub_point_cloud_; image_geometry::PinholeCameraModel model_; virtual void onInit(); void connectCb(); void depthCb(const sensor_msgs::ImageConstPtr& depth_msg, const sensor_msgs::CameraInfoConstPtr& info_msg); }; void MyPointCloudGeneratorNodelet::onInit() { ros::NodeHandle& nh = getNodeHandle(); it_.reset(new image_transport::ImageTransport(nh)); queue_size_ = 5; // Read parameters // Monitor whether anyone is subscribed to the output ros::SubscriberStatusCallback connect_cb = boost::bind(&MyPointCloudGeneratorNodelet::connectCb, this); // Make sure we don't enter connectCb() between advertising and assigning to pub_point_cloud_ boost::lock_guard<boost::mutex> lock(connect_mutex_); pub_point_cloud_ = nh.advertise<PointCloud>("points", 1, connect_cb, connect_cb); ROS_INFO("onInit"); } // Handles (un)subscribing when clients (un)subscribe void MyPointCloudGeneratorNodelet::connectCb() { boost::lock_guard<boost::mutex> lock(connect_mutex_); if (pub_point_cloud_.getNumSubscribers() == 0) { sub_depth_.shutdown(); } else if (!sub_depth_) { image_transport::TransportHints hints("raw", ros::TransportHints(), getPrivateNodeHandle()); sub_depth_ = it_->subscribeCamera("image_rect", queue_size_, &MyPointCloudGeneratorNodelet::depthCb, this, hints); } ROS_INFO("connectCb"); } void MyPointCloudGeneratorNodelet::depthCb(const sensor_msgs::ImageConstPtr& depth_msg, const sensor_msgs::CameraInfoConstPtr& info_msg) { pcl_process_class mpcl_process_class; mpcl_process_class.pcl_process(depth_msg); PointCloud pointCloud; pcl::toROSMsg(*mpcl_p ointCloud); } } // namespace depth_image_proc // Register as nodelet #include <pluginlib/class_list_macros.h> PLUGINLIB_EXPORT_CLASS(vision_obstacles_avoidance::MyPointCloudGeneratorNodelet,nodelet::Nodelet);
nodelet.launch
<launch> <node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" output="screen"/> <node pkg="nodelet" type="nodelet" name="MyPointCloudGeneratorNodelet" args="load vision_obstacles_avoidance/MyPointCloudGeneratorNodelet standalone_nodelet" output="screen"> <remap from="image_rect" to="/camera/depth_registered/hw_registered/image_rect_raw"/> <remap from="points" to="/point_cloud"/> <remap from="/camera/depth_registered/hw_registered/camera_info" to="/camera/depth_registered/camera_info"/> </node> </launch>
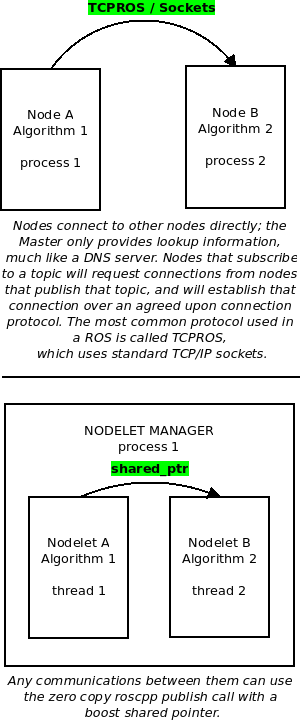
nodelet比较好用尤其是在使用pointcloud时候,由于ros node之间采用tcpros标准来传输数据,点云要经过压缩解压缩过程所以很慢,但是nodelet是直接使用原来数据,类似指针,但是只能在同一个机器下才有用。
class MyPointCloudGeneratorNodelet : public nodelet::Nodelet{ // Subscriptions boost::shared_ptr<image_transport::ImageTransport> it_; image_transport::CameraSubscriber sub_depth_; int queue_size_;
// Publications boost::mutex connect_mutex_; typedef sensor_msgs::PointCloud2 PointCloud; ros::Publisher pub_point_cloud_;
image_geometry::PinholeCameraModel model_;
virtual void onInit();
void connectCb();
void depthCb(const sensor_msgs::ImageConstPtr& depth_msg, const sensor_msgs::CameraInfoConstPtr& info_msg);};
void MyPointCloudGeneratorNodelet::onInit(){ ros::NodeHandle& nh = getNodeHandle(); it_.reset(new image_transport::ImageTransport(nh)); queue_size_ = 5; // Read parameters
// Monitor whether anyone is subscribed to the output ros::SubscriberStatusCallback connect_cb = boost::bind(&MyPointCloudGeneratorNodelet::connectCb, this); // Make sure we don't enter connectCb() between advertising and assigning to pub_point_cloud_ boost::lock_guard<boost::mutex> lock(connect_mutex_); pub_point_cloud_ = nh.advertise<PointCloud>("points", 1, connect_cb, connect_cb); ROS_INFO("onInit");
}
// Handles (un)subscribing when clients (un)subscribevoid MyPointCloudGeneratorNodelet::connectCb(){ boost::lock_guard<boost::mutex> lock(connect_mutex_); if (pub_point_cloud_.getNumSubscribers() == 0) { sub_depth_.shutdown(); } else if (!sub_depth_) { image_transport::TransportHints hints("raw", ros::TransportHints(), getPrivateNodeHandle()); sub_depth_ = it_->subscribeCamera("image_rect", queue_size_, &MyPointCloudGeneratorNodelet::depthCb, this, hints); } ROS_INFO("connectCb");
}
void MyPointCloudGeneratorNodelet::depthCb(const sensor_msgs::ImageConstPtr& depth_msg, const sensor_msgs::CameraInfoConstPtr& info_msg){
pcl_process_class mpcl_process_class; mpcl_process_class.pcl_process(depth_msg); PointCloud pointCloud; pcl::toROSMsg(*mpcl_p ointCloud);}
} // namespace depth_image_proc
// Register as nodelet#include <pluginlib/class_list_macros.h>PLUGINLIB_EXPORT_CLASS(vision_obstacles_avoidance::MyPointCloudGeneratorNodelet,nodelet::Nodelet);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号