二分图最大匹配匈牙利算法
二分图最大匹配
前言:其实老早就学了,但是之前学的时候不透彻,稀里糊涂背背模板就过去了。果然,在最近一次原题检测上找到了我,然后就“暴毙”了。
我就意识到学算法不能这么学,要摸清楚规律、掌握证明方法、思考推论过程。
俗话说“温故而知新”,的确,我也在复习的过程中有了更透彻的理解。所以我决定写一篇笔记。
本文有很多地方直接搬用了一些参考资料,所以本篇笔记原创部分主要为对关键部分进行解释。建议:草稿纸和笔永远是最好的工具。在看本文过程中,要仔细思考任何一部分,不要囫囵吞枣。
注:本篇文章是我这个小蒟蒻写的,真正的dalao请看个玩笑便好,不必争论对错(但是欢迎指出文章存在的小错误)。
二分图初步
建议:如果你已对此有些许了解,可以根据目录直接跳到二分图匹配部分
什么是二分图
参考资料是这样介绍的:
- 二分图又称作二部图,是图论中的一种特殊模型。
- 设\(G=(V, E)\)是一个无向图。如果顶点集\(V\)可分割为两个互不相交的子集\(X\)和\(Y\),并且图中每条边连接的两个顶点一个在\(X\)中,另一个在\(Y\)中,则称图\(G\)为二分图。
但其实可以简化成一张图去理解:
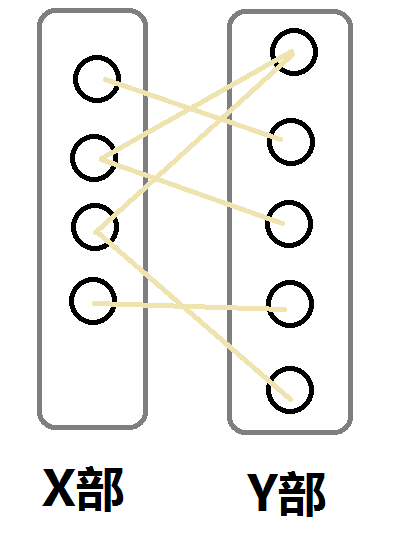
上图就是一个二分图。
二分图性质
参考资料:
- 定理:当且仅当无向图\(G\)的每一个回路的边数均是偶数时,\(G\)才是一个二分图。如果无回路,相当于任一回路的边数为\(0\),故也视为二分图。
二分图判定
参考资料这里写得太复杂了,简单的话描述一下:
- 如果是一个连通图
- 从顶点\(1\)开始宽度遍历整个图(\(BFS\))
- 对遍历到的点进行染色,只染黑、白两色
- 染色过程中做到相邻点的颜色不同
- 如果不是一个连通图
- 在每个连通块中作判定,判定方法与上面相似
如下图,可判定为一个二分图:
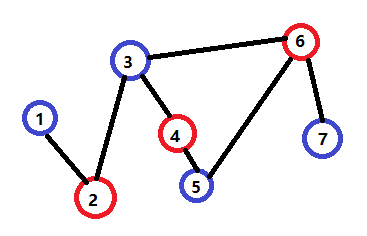
为了观察方便,这里用红、蓝两色代替了黑、白两色。
二分图匹配
什么是匹配
先看看参考资料怎么说:
给定一个二分图\(G\),在\(G\)的一个子图\(M\)中,\(M\)的边集\({E}\)中的任意两条边都不依附于同一个顶点,则称\(M\)是一个匹配。
图中加粗的边是数量为\(2\)的匹配。

这里讲得很清楚,不过多赘述(下文当资料讲得很简单明了时,也不会再过多解释)。
什么是最大匹配
选择边数最大的子图称为图的最大匹配问题。
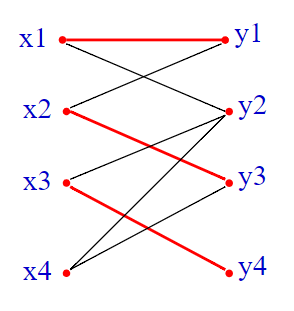
如图加粗的边是一个最大匹配:

可以简单理解为使\(X\)部的顶点和\(Y\)部的顶点匹配尽可能多。
什么是增广路径
设\(M\)为二分图\(G\)已匹配边的集合,若\(P\)是图\(G\)中一条连通两个未匹配顶点的路径(\(P\)的起点在\(X\)部,终点在\(Y\)部,反之亦可),并且属\(M\)的边和不属\(M\)的边(即已匹配和待匹配的边)在\(P\)上交替出现,则称\(P\)为相对于\(M\)的一条增广路径。
增广路径是一条“交错轨”。也就是说, 它的第一条边是目前还没有参与匹配的,第二条边参与了匹配,第三条边没有……最后一条边没有参与匹配,并且起点和终点还没有被选择过,这样交错进行,显然\(P\)有奇数条边。
为什么\(P\)会有奇数条边呢?
根据定义,\(P\)路径的起点和终点不在同一个部,所以必然是奇数条边。
下面来根据这个图找一下增广路:
易得一条路径:
因为\(y_2\)是\(Y\)部中未匹配的点,所以此路径是增广路径。
其中\(\in M\)的边有\((x_2,y_3),(x_1,y_1)\),不属于匹配的边有\((x_4,y_3),(x_2,y_1),(x_1,y_2)\)。
可见不属于匹配的边要多一条。
如果我们想让情况变成匹配边会多一条,那就思考一下“取反”操作,即将匹配边变为非匹配边,反之同理。
可得:
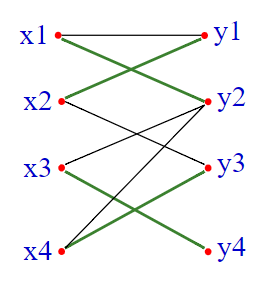
可以得到这样的匹配\(M'=((x_3,y_4),(x_4,y_3),(x_2,y_1),(x_1,y_2))\)。
仔细思考,发现匹配仍然合法。交错轨也还存在。
可以证明,当不能再找到增广路时,就已经得到了一个最大匹配。
为什么?
假设还能再找到一条增广路,那经过取反操作必定可以多增加一条匹配边。那最大匹配是最终形态,必定不会再有一条增广路。
而这,就是匈牙利算法的思路。
增广路径性质
- \(P\)的路径长度必定为奇数,第一条边和最后一条边都不属于\(M\),因为两个端点分属两个集合,且未匹配。
- \(P\)经过取反操作可以得到一个更大的匹配\(M'\)。
- \(M\)为\(G\)的最大匹配当且仅当不存在相对于\(M\)的增广路径。
以上很好理解,根据定义可推出。
匈牙利算法
为什么要用匈牙利算法
匈牙利算法就是用增广路求最大匹配问题,由匈牙利数学家Edmonds于1965年提出。
匈牙利算法长什么样
- 置\(M\)为空
- 找出一条增广路径\(P\),通过取反操作获得更大的匹配\(M'\)代替\(M\)
- 重复步骤2,直至再也找不出新增广路
怎么找增广路
第一个想法肯定是用\(dfs\):
从\(X\)部一个未匹配的顶点\(u\)开始,找一个未访问的邻接点\(v\)(\(v\)一定是\(Y\)部顶点)。
对于\(v\),分两种情况:
- 如果\(v\)未匹配,则已找到一条增广路。
- 如果\(v\)已匹配,设\(v\)的匹配顶点为\(w\)(\(w\)一定属\(X\)部)。此时边\((w,v)\)为匹配边,根据“取反”思想,要将\((w,v)\)改为未匹配,\((u,v)\)改为匹配。怎样才能实现这一点?要看从\(w\)为起点出发能不能找到一条新增广路\(P'\)。如果成功,那\(u\rightarrow v\rightarrow P'\)就是以\(u\)为起点的增广路径。
那么我们就成功地把匈牙利算法核心部分搞懂了,可以上代码了。
代码实现匈牙利算法
寻找增广路部分
code:
// cx[i]表示与X部i点匹配的Y部顶点编号,cy[i]表示与Y部i点匹配的X部顶点编号
bool dfs(ll x)
{
for (auto y : v[x])
{
if (!vis[y])
{
vis[y] = 1;
if (cy[y] == -1 || dfs(cy[y]))
{
cx[x] = y, cy[y] = x;
return 1;
}
}
}
return 0;
}
匈牙利算法主函数
code:
#define mem(a,b) memset(a,b,sizeof(a))
ll maxmatch()
{
ll ans = 0;
mem(cx, -1);
mem(cy, -1);
rp(i, 1, n)
{
if (cx[i] == -1)
{
mem(vis, 0);
ans += dfs(i);
}
}
return ans;
}
板题&后记
前几天原题检测,考了一些最大匹配的原题。复习时才发现有很多纰漏平时没注意到,所以写了这篇文章。
还是挺耗费精力的,因为这种知识和图片打交道比较多,制作图片和上传都挺麻烦的。
挂个板子吧。
[USACO4.2]完美的牛栏The Perfect Stall
这里挂两个代码,在连接\(X\)部与\(Y\)部方面有些不同,根据个人习惯取舍咯……
本人主要是按照题目意思及时变通,并没有什么常用的版本。
版本1:用一个数组存下两种关系(个人较常用)
#include <bits/stdc++.h>
using namespace std;
#define ll long long
#define rp(i, o, p) for (ll i = o; i <= p; ++i)
#define pr(i, o, p) for (ll i = o; i >= p; --i)
#define mem(a, b) memset(a, b, sizeof(a))
const ll MAXN = 1e4 + 5; // 这里要注意一下,不然会RE
ll n, m;
ll s[MAXN];
bool vis[MAXN];
ll c[MAXN];
ll sum, en[MAXN << 1], hed[MAXN], lst[MAXN << 1];
void add(ll x, ll y) {
en[++sum] = y;
lst[sum] = hed[x];
hed[x] = sum;
}
bool dfs(ll x) {
for (ll i = hed[x]; i; i = lst[i]) {
ll y = en[i];
if (!vis[y]) {
vis[y] = 1;
if (!c[y] || dfs(c[y])) {
c[y] = x;
return 1;
}
}
}
return 0;
}
ll maxmatch() {
ll ans = 0;
rp(i, 1, n) {
mem(vis, 0);
if (dfs(i))
++ans;
}
return ans;
}
int main() {
scanf("%lld%lld", &n, &m);
rp(i, 1, n) {
scanf("%lld", &s[i]);
rp(j, 1, s[i]) {
ll t;
scanf("%lld", &t);
add(i, t);
}
}
printf("%lld\n", maxmatch());
return 0;
}
版本2:不同部用不同数组(根据题目不同偶尔采用)
#include <bits/stdc++.h>
using namespace std;
#define ll long long
#define rp(i, o, p) for (ll i = o; i <= p; ++i)
#define pr(i, o, p) for (ll i = o; i >= p; --i)
#define pb push_back
#define mem(a, b) memset(a, b, sizeof(a))
const ll MAXN = 200 + 5;
ll n, m;
vector<ll> v[MAXN << 1];
ll cx[MAXN], cy[MAXN << 1];
bool vis[MAXN << 1];
bool dfs(ll x) {
for (auto y : v[x]) {
if (!vis[y]) {
vis[y] = 1;
if (cy[y] == -1 || dfs(cy[y])) {
cx[x] = y, cy[y] = x;
return 1;
}
}
}
return 0;
}
ll maxmatch() {
ll ans = 0;
mem(cx, -1);
mem(cy, -1);
rp(i, 1, n) {
if (cx[i] == -1) {
mem(vis, 0);
ans += dfs(i);
}
}
return ans;
}
int main() {
scanf("%lld%lld", &n, &m);
rp(i, 1, n) {
ll x;
scanf("%lld", &x);
rp(j, 1, x) {
ll y;
scanf("%lld", &y);
v[i].pb(y + n), v[y + n].pb(i);
}
}
printf("%lld\n", maxmatch());
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号