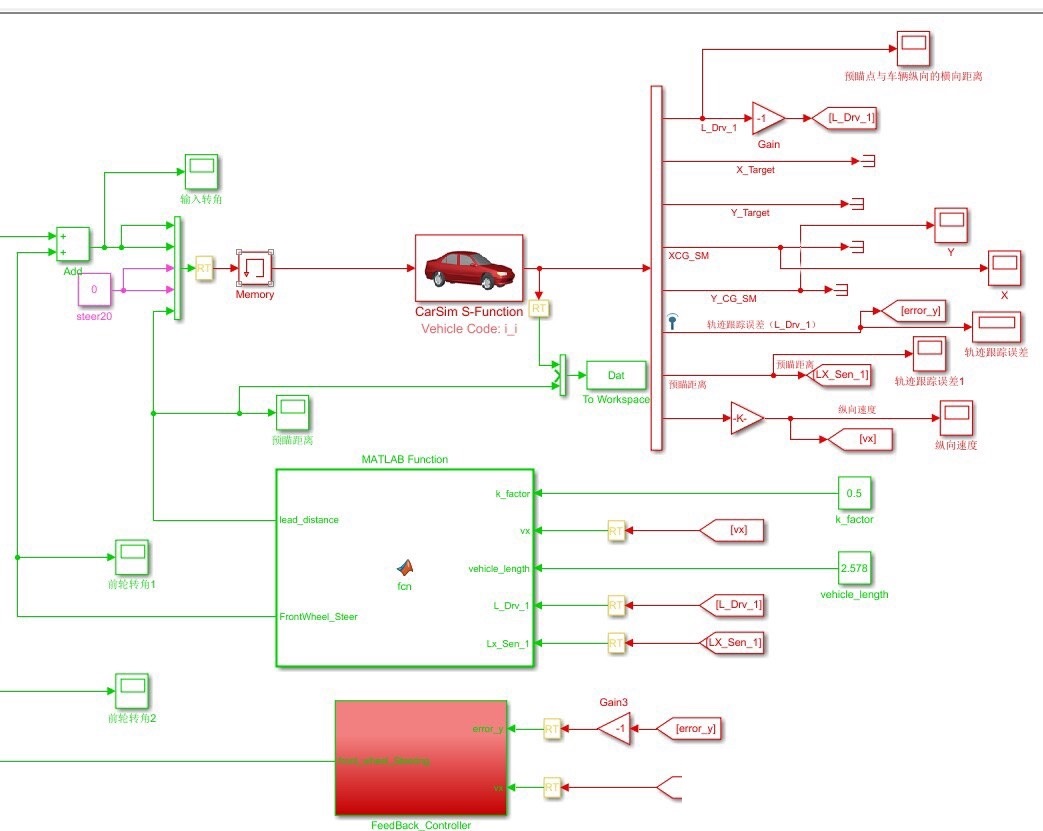
无人驾驶轨迹自适应预瞄控制和自适应p反馈联合控制,自适应预苗模型和基于模糊p控制均在simulink中搭建。
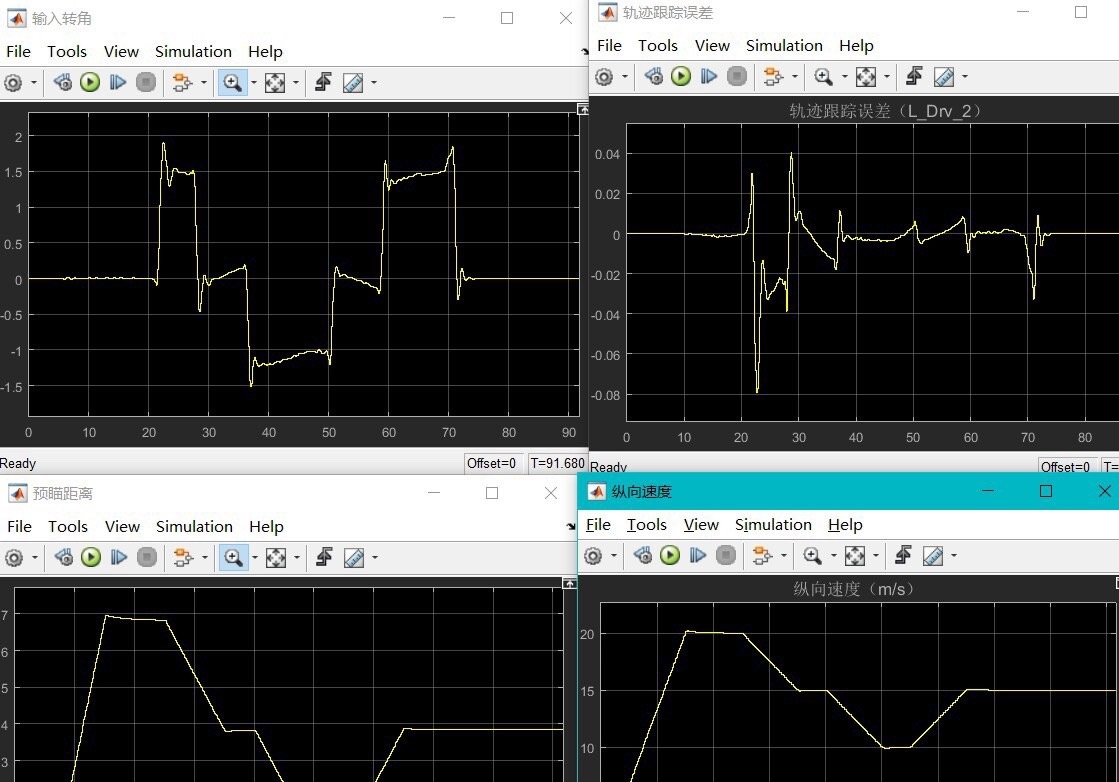
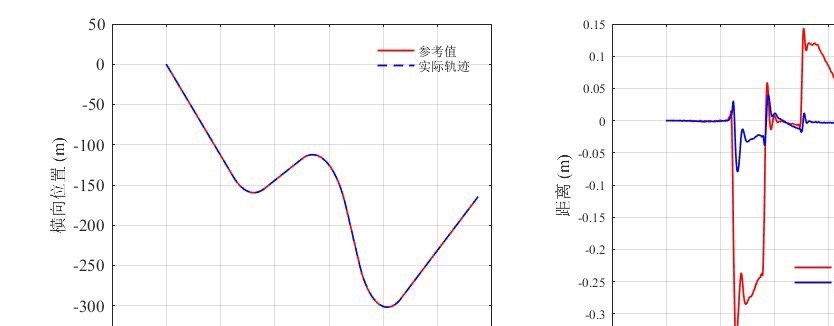
个人觉得跟踪效果相比模糊pid效果好很多,轨迹跟踪过程,转角控制平滑自然,车速在36到72km每小时下,变速下的轨迹跟踪精度误差在10cm范围内,精度很好。
另外可赠送基于模糊pid控制的路径跟踪,以及搭建预苗模型对应的资料部分
烈推荐仔细看看。
ID:72120685199685919