FreeRTOS--任务调度
示例源码基于FreeRTOS V9.0.0
任务调度
1. 概述
在FreeRtos中任务切换的本质是函数调用,CPU在指定时间内执行不同的函数,从微观上看每个任务都是顺序执行的,但是CPU运算能力很强,可以在很短时间内完成指令的执行,从宏观上看每个任务相当与同时在执行。
调度算法是决定 哪个 RTOS 任务应处于运行状态的软件程序。在任何给定时间, 每个处理器核心只能有一个任务处于运行状态。
2. 调度策略
FreeRTOS 默认使用固定优先级的抢占式调度策略,对同等优先级的任务执行时间片轮询调度:
-
“固定优先级” 是指调度器不会永久更改任务的优先级, 尽管它可能会因 优先级继承而暂时提高任务的优先级。
-
“抢占式调度” 是指调度器始终运行优先级最高且可运行的 RTOS 任务, 无论任务何时能够运行。例如, 如果中断服务程序 (ISR) 更改了优先级最高且可运行的任务, 调度器会停止当前正在运行的低优先级任务 并启动高优先级任务——即使这发生在同一个时间片内 。此时,据说高优先级任务 “抢占”了低优先级任务。
-
“轮询调度” 是指具有相同优先级的任务轮流进入运行状态。
-
“时间片” 是指调度器会在每个 tick 中断上在同等优先级任务之间进行切换, tick 中断之间的时间构成一个时间片。tick 中断是 RTOS 用来衡量时间的周期性中断。
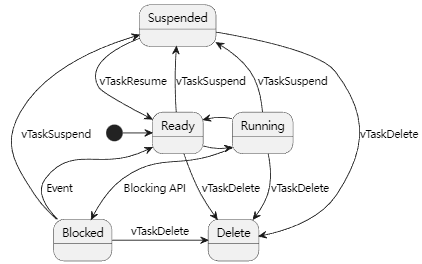
3. 任务的几种状态
定义在task.h
/* Task states returned by eTaskGetState. */
typedef enum
{
eRunning = 0, /* A task is querying the state of itself, so must be running. */
eReady, /* The task being queried is in a read or pending ready list. */
eBlocked, /* The task being queried is in the Blocked state. */
eSuspended, /* The task being queried is in the Suspended state, or is in the Blocked state with an infinite time out. */
eDeleted, /* The task being queried has been deleted, but its TCB has not yet been freed. */
eInvalid /* Used as an 'invalid state' value. */
} eTaskState;
4. 任务调度的源码分析
4.1 任务控制块
/*
* Task control block. A task control block (TCB) is allocated for each task,
* and stores task state information, including a pointer to the task's context
* (the task's run time environment, including register values)
*/
typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; /*< Points to the location of the last item placed on the tasks stack. THIS MUST BE THE FIRST MEMBER OF THE TCB STRUCT. */
#if ( portUSING_MPU_WRAPPERS == 1 )
xMPU_SETTINGS xMPUSettings; /*< The MPU settings are defined as part of the port layer. THIS MUST BE THE SECOND MEMBER OF THE TCB STRUCT. */
#endif
ListItem_t xStateListItem; /*< The list that the state list item of a task is reference from denotes the state of that task (Ready, Blocked, Suspended ). */
ListItem_t xEventListItem; /*< Used to reference a task from an event list. */
UBaseType_t uxPriority; /*< The priority of the task. 0 is the lowest priority. */
StackType_t *pxStack; /*< Points to the start of the stack. */
char pcTaskName[ configMAX_TASK_NAME_LEN ];/*< Descriptive name given to the task when created. Facilitates debugging only. */ /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
#if ( portSTACK_GROWTH > 0 )
StackType_t *pxEndOfStack; /*< Points to the end of the stack on architectures where the stack grows up from low memory. */
#endif
#if ( portCRITICAL_NESTING_IN_TCB == 1 )
UBaseType_t uxCriticalNesting; /*< Holds the critical section nesting depth for ports that do not maintain their own count in the port layer. */
#endif
#if ( configUSE_TRACE_FACILITY == 1 )
UBaseType_t uxTCBNumber; /*< Stores a number that increments each time a TCB is created. It allows debuggers to determine when a task has been deleted and then recreated. */
UBaseType_t uxTaskNumber; /*< Stores a number specifically for use by third party trace code. */
#endif
#if ( configUSE_MUTEXES == 1 )
UBaseType_t uxBasePriority; /*< The priority last assigned to the task - used by the priority inheritance mechanism. */
UBaseType_t uxMutexesHeld;
#endif
#if ( configUSE_APPLICATION_TASK_TAG == 1 )
TaskHookFunction_t pxTaskTag;
#endif
#if( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 )
void *pvThreadLocalStoragePointers[ configNUM_THREAD_LOCAL_STORAGE_POINTERS ];
#endif
#if( configGENERATE_RUN_TIME_STATS == 1 )
uint32_t ulRunTimeCounter; /*< Stores the amount of time the task has spent in the Running state. */
#endif
#if ( configUSE_NEWLIB_REENTRANT == 1 )
/* Allocate a Newlib reent structure that is specific to this task.
Note Newlib support has been included by popular demand, but is not
used by the FreeRTOS maintainers themselves. FreeRTOS is not
responsible for resulting newlib operation. User must be familiar with
newlib and must provide system-wide implementations of the necessary
stubs. Be warned that (at the time of writing) the current newlib design
implements a system-wide malloc() that must be provided with locks. */
struct _reent xNewLib_reent;
#endif
#if( configUSE_TASK_NOTIFICATIONS == 1 )
volatile uint32_t ulNotifiedValue;
volatile uint8_t ucNotifyState;
#endif
/* See the comments above the definition of
tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE. */
#if( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 )
uint8_t ucStaticallyAllocated; /*< Set to pdTRUE if the task is a statically allocated to ensure no attempt is made to free the memory. */
#endif
#if( INCLUDE_xTaskAbortDelay == 1 )
uint8_t ucDelayAborted;
#endif
} tskTCB;
/* The old tskTCB name is maintained above then typedefed to the new TCB_t name
below to enable the use of older kernel aware debuggers. */
typedef tskTCB TCB_t;
几个关键字段说明:
- pxTopOfStack:指向栈顶;
- xStateListItem:状态列表节点,该节点可能存在于(Ready, Blocked, Suspended)列表中;
- xEventListItem:事件列表节点;
- uxPriority:任务的优先级,0是最低优先级;
- pxStack:指向任务的栈起始地址;
- pcTaskName:任务名称;
- pxEndOfStack:栈生长方向为向上时才有用(从低地址到高地址),指向栈末端地址;
- uxBasePriority:任务的优先级,仅在启用互斥量时使用,主要用于优先级继承机制;
- uxMutexesHeld:标识当前任务是否持有互斥量;
4.2 几个全局变量说明
4.2.1 pxCurrentTCB
PRIVILEGED_DATA TCB_t * volatile pxCurrentTCB = NULL;
pxCurrentTCB指向当前正在运行的任务的控制块;
4.2.2 任务调度用到的几个链表
/* Lists for ready and blocked tasks. --------------------*/
PRIVILEGED_DATA static List_t pxReadyTasksLists[ configMAX_PRIORITIES ];/*< Prioritised ready tasks. */
PRIVILEGED_DATA static List_t xDelayedTaskList1; /*< Delayed tasks. */
PRIVILEGED_DATA static List_t xDelayedTaskList2; /*< Delayed tasks (two lists are used - one for delays that have overflowed the current tick count. */
PRIVILEGED_DATA static List_t * volatile pxDelayedTaskList; /*< Points to the delayed task list currently being used. */
PRIVILEGED_DATA static List_t * volatile pxOverflowDelayedTaskList; /*< Points to the delayed task list currently being used to hold tasks that have overflowed the current tick count. */
PRIVILEGED_DATA static List_t xPendingReadyList; /*< Tasks that have been readied while the scheduler was suspended. They will be moved to the ready list when the scheduler is resumed. */
#if( INCLUDE_vTaskDelete == 1 )
PRIVILEGED_DATA static List_t xTasksWaitingTermination; /*< Tasks that have been deleted - but their memory not yet freed. */
PRIVILEGED_DATA static volatile UBaseType_t uxDeletedTasksWaitingCleanUp = ( UBaseType_t ) 0U;
#endif
#if ( INCLUDE_vTaskSuspend == 1 )
PRIVILEGED_DATA static List_t xSuspendedTaskList; /*< Tasks that are currently suspended. */
#endif
- pxReadyTasksLists:就绪链表数组,按优先级存储,相同优先级的就绪态任务存于同一链表中;
- xDelayedTaskList1:阻塞链表,存储阻塞态的任务;
- xDelayedTaskList2:阻塞链表,当唤醒的tick时刻溢出时(唤醒时刻的tick < 当前系统tick),将阻塞任务存于此链表中,否则存于xDelayedTaskList1;
- pxDelayedTaskList:指向阻塞链表,当前系统tick未溢出时,指向xDelayedTaskList1,溢出时,指向xDelayedTaskList2;
- pxOverflowDelayedTaskList:指向阻塞链表,当前系统tick未溢出时,指向xDelayedTaskList2,溢出时,指向xDelayedTaskList1;
- xPendingReadyList:待就绪链表,当调度器挂起时,就绪的任务不再加入pxReadyTasksLists,而是加入xPendingReadyList,等调度器恢复时,再将xPendingReadyList内的任务移至pxReadyTasksLists;
- xTasksWaitingTermination:待删除的任务链表;
- xSuspendedTaskList:存放暂停(挂起)的任务;
4.2.3 其他
/* Other file private variables. --------------------------------*/
PRIVILEGED_DATA static volatile UBaseType_t uxCurrentNumberOfTasks = ( UBaseType_t ) 0U;
PRIVILEGED_DATA static volatile TickType_t xTickCount = ( TickType_t ) 0U;
PRIVILEGED_DATA static volatile UBaseType_t uxTopReadyPriority = tskIDLE_PRIORITY;
PRIVILEGED_DATA static volatile BaseType_t xSchedulerRunning = pdFALSE;
PRIVILEGED_DATA static volatile UBaseType_t uxPendedTicks = ( UBaseType_t ) 0U;
PRIVILEGED_DATA static volatile BaseType_t xYieldPending = pdFALSE;
PRIVILEGED_DATA static volatile BaseType_t xNumOfOverflows = ( BaseType_t ) 0;
PRIVILEGED_DATA static UBaseType_t uxTaskNumber = ( UBaseType_t ) 0U;
PRIVILEGED_DATA static volatile TickType_t xNextTaskUnblockTime = ( TickType_t ) 0U; /* Initialised to portMAX_DELAY before the scheduler starts. */
PRIVILEGED_DATA static TaskHandle_t xIdleTaskHandle = NULL; /*< Holds the handle of the idle task. The idle task is created automatically when the scheduler is started. */
/* Context switches are held pending while the scheduler is suspended. Also,
interrupts must not manipulate the xStateListItem of a TCB, or any of the
lists the xStateListItem can be referenced from, if the scheduler is suspended.
If an interrupt needs to unblock a task while the scheduler is suspended then it
moves the task's event list item into the xPendingReadyList, ready for the
kernel to move the task from the pending ready list into the real ready list
when the scheduler is unsuspended. The pending ready list itself can only be
accessed from a critical section. */
PRIVILEGED_DATA static volatile UBaseType_t uxSchedulerSuspended = ( UBaseType_t ) pdFALSE;
- uxCurrentNumberOfTasks:当前创建的任务个数;
- xTickCount:当前tick计数,启动任务调度时(vTaskStartScheduler)初始化为0,随系统systick中断更新计数(xTaskIncrementTick);
- uxTopReadyPriority:就绪任务的优先级bit表,可用于计算就绪任务的最高优先级;
- xSchedulerRunning:调度器是否在运行,启动任务调度时(vTaskStartScheduler)置为pdTRUE,结束任务调度时(vTaskEndScheduler)置为pdFALSE;
- uxPendedTicks:挂起调度器时,随系统systick中断更新计数(xTaskIncrementTick),在恢复调度器时(xTaskResumeAll)会根据此计数来恢复(时钟滴答的处理、任务恢复就绪状态、实行调度);
- xYieldPending:用于标识是否需要进行任务切换;
- xNumOfOverflows:tick溢出次数;
- uxTaskNumber:仅用于跟踪调试TCB的创建和销毁;
- xNextTaskUnblockTime:标识下一次唤醒进程的tick时刻;
- xIdleTaskHandle:空闲任务句柄;
4.3 任务调度的实现原理
4.3.1 任务的创建与销毁
4.3.1.1 创建
#if( configSUPPORT_DYNAMIC_ALLOCATION == 1 )
BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,
const char * const pcName,
const uint16_t usStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask ) /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
{
TCB_t *pxNewTCB;
BaseType_t xReturn;
/* If the stack grows down then allocate the stack then the TCB so the stack
does not grow into the TCB. Likewise if the stack grows up then allocate
the TCB then the stack. */
#if( portSTACK_GROWTH > 0 )
{
/* Allocate space for the TCB. Where the memory comes from depends on
the implementation of the port malloc function and whether or not static
allocation is being used. */
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) );
if( pxNewTCB != NULL )
{
/* Allocate space for the stack used by the task being created.
The base of the stack memory stored in the TCB so the task can
be deleted later if required. */
pxNewTCB->pxStack = ( StackType_t * ) pvPortMalloc( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
if( pxNewTCB->pxStack == NULL )
{
/* Could not allocate the stack. Delete the allocated TCB. */
vPortFree( pxNewTCB );
pxNewTCB = NULL;
}
}
}
#else /* portSTACK_GROWTH */
{
StackType_t *pxStack;
/* Allocate space for the stack used by the task being created. */
pxStack = ( StackType_t * ) pvPortMalloc( ( ( ( size_t ) usStackDepth ) * sizeof( StackType_t ) ) ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
if( pxStack != NULL )
{
/* Allocate space for the TCB. */
pxNewTCB = ( TCB_t * ) pvPortMalloc( sizeof( TCB_t ) ); /*lint !e961 MISRA exception as the casts are only redundant for some paths. */
if( pxNewTCB != NULL )
{
/* Store the stack location in the TCB. */
pxNewTCB->pxStack = pxStack;
}
else
{
/* The stack cannot be used as the TCB was not created. Free
it again. */
vPortFree( pxStack );
}
}
else
{
pxNewTCB = NULL;
}
}
#endif /* portSTACK_GROWTH */
if( pxNewTCB != NULL )
{
#if( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 )
{
/* Tasks can be created statically or dynamically, so note this
task was created dynamically in case it is later deleted. */
pxNewTCB->ucStaticallyAllocated = tskDYNAMICALLY_ALLOCATED_STACK_AND_TCB;
}
#endif /* configSUPPORT_STATIC_ALLOCATION */
prvInitialiseNewTask( pxTaskCode, pcName, ( uint32_t ) usStackDepth, pvParameters, uxPriority, pxCreatedTask, pxNewTCB, NULL );
prvAddNewTaskToReadyList( pxNewTCB );
xReturn = pdPASS;
}
else
{
xReturn = errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY;
}
return xReturn;
}
#endif /* configSUPPORT_DYNAMIC_ALLOCATION */
动态创建任务可分为3个步骤:
- 根据栈的生长方向,决定创建TCB和任务栈空间的先后顺序;
- 调用prvInitialiseNewTask初始化任务;
- 调用prvAddNewTaskToReadyList将创建的任务加入就绪链表;
宏portSTACK_GROWTH标识栈的生长方向,小于等于0表示向下生长(高地址 -> 低地址),大于0表示向上生长(低地址 -> 高地址)。FreeRTOS根据栈的生长方向决定排列栈空间和TCB的布局:
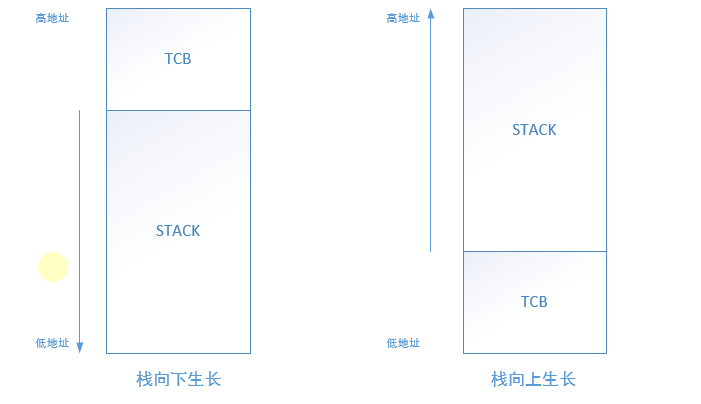
栈的生长方向避开了TCB,以防止栈溢出导致破坏TCB,从而造成异常;
prvInitialiseNewTask实现:
static void prvInitialiseNewTask( TaskFunction_t pxTaskCode,
const char * const pcName,
const uint32_t ulStackDepth,
void * const pvParameters,
UBaseType_t uxPriority,
TaskHandle_t * const pxCreatedTask,
TCB_t *pxNewTCB,
const MemoryRegion_t * const xRegions ) /*lint !e971 Unqualified char types are allowed for strings and single characters only. */
{
StackType_t *pxTopOfStack;
UBaseType_t x;
#if( portUSING_MPU_WRAPPERS == 1 )
/* Should the task be created in privileged mode? */
BaseType_t xRunPrivileged;
if( ( uxPriority & portPRIVILEGE_BIT ) != 0U )
{
xRunPrivileged = pdTRUE;
}
else
{
xRunPrivileged = pdFALSE;
}
uxPriority &= ~portPRIVILEGE_BIT;
#endif /* portUSING_MPU_WRAPPERS == 1 */
/* Avoid dependency on memset() if it is not required. */
#if( ( configCHECK_FOR_STACK_OVERFLOW > 1 ) || ( configUSE_TRACE_FACILITY == 1 ) || ( INCLUDE_uxTaskGetStackHighWaterMark == 1 ) )
{
/* Fill the stack with a known value to assist debugging. */
( void ) memset( pxNewTCB->pxStack, ( int ) tskSTACK_FILL_BYTE, ( size_t ) ulStackDepth * sizeof( StackType_t ) );
}
#endif /* ( ( configCHECK_FOR_STACK_OVERFLOW > 1 ) || ( ( configUSE_TRACE_FACILITY == 1 ) || ( INCLUDE_uxTaskGetStackHighWaterMark == 1 ) ) ) */
/* Calculate the top of stack address. This depends on whether the stack
grows from high memory to low (as per the 80x86) or vice versa.
portSTACK_GROWTH is used to make the result positive or negative as required
by the port. */
#if( portSTACK_GROWTH < 0 )
{
pxTopOfStack = pxNewTCB->pxStack + ( ulStackDepth - ( uint32_t ) 1 );
pxTopOfStack = ( StackType_t * ) ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack ) & ( ~( ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) ) ); /*lint !e923 MISRA exception. Avoiding casts between pointers and integers is not practical. Size differences accounted for using portPOINTER_SIZE_TYPE type. */
/* Check the alignment of the calculated top of stack is correct. */
configASSERT( ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack & ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) == 0UL ) );
}
#else /* portSTACK_GROWTH */
{
pxTopOfStack = pxNewTCB->pxStack;
/* Check the alignment of the stack buffer is correct. */
configASSERT( ( ( ( portPOINTER_SIZE_TYPE ) pxNewTCB->pxStack & ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) == 0UL ) );
/* The other extreme of the stack space is required if stack checking is
performed. */
pxNewTCB->pxEndOfStack = pxNewTCB->pxStack + ( ulStackDepth - ( uint32_t ) 1 );
}
#endif /* portSTACK_GROWTH */
/* Store the task name in the TCB. */
for( x = ( UBaseType_t ) 0; x < ( UBaseType_t ) configMAX_TASK_NAME_LEN; x++ )
{
pxNewTCB->pcTaskName[ x ] = pcName[ x ];
/* Don't copy all configMAX_TASK_NAME_LEN if the string is shorter than
configMAX_TASK_NAME_LEN characters just in case the memory after the
string is not accessible (extremely unlikely). */
if( pcName[ x ] == 0x00 )
{
break;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
/* Ensure the name string is terminated in the case that the string length
was greater or equal to configMAX_TASK_NAME_LEN. */
pxNewTCB->pcTaskName[ configMAX_TASK_NAME_LEN - 1 ] = '\0';
/* This is used as an array index so must ensure it's not too large. First
remove the privilege bit if one is present. */
if( uxPriority >= ( UBaseType_t ) configMAX_PRIORITIES )
{
uxPriority = ( UBaseType_t ) configMAX_PRIORITIES - ( UBaseType_t ) 1U;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
pxNewTCB->uxPriority = uxPriority;
#if ( configUSE_MUTEXES == 1 )
{
pxNewTCB->uxBasePriority = uxPriority;
pxNewTCB->uxMutexesHeld = 0;
}
#endif /* configUSE_MUTEXES */
vListInitialiseItem( &( pxNewTCB->xStateListItem ) );
vListInitialiseItem( &( pxNewTCB->xEventListItem ) );
/* Set the pxNewTCB as a link back from the ListItem_t. This is so we can get
back to the containing TCB from a generic item in a list. */
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xStateListItem ), pxNewTCB );
/* Event lists are always in priority order. */
listSET_LIST_ITEM_VALUE( &( pxNewTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) uxPriority ); /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xEventListItem ), pxNewTCB );
#if ( portCRITICAL_NESTING_IN_TCB == 1 )
{
pxNewTCB->uxCriticalNesting = ( UBaseType_t ) 0U;
}
#endif /* portCRITICAL_NESTING_IN_TCB */
#if ( configUSE_APPLICATION_TASK_TAG == 1 )
{
pxNewTCB->pxTaskTag = NULL;
}
#endif /* configUSE_APPLICATION_TASK_TAG */
#if ( configGENERATE_RUN_TIME_STATS == 1 )
{
pxNewTCB->ulRunTimeCounter = 0UL;
}
#endif /* configGENERATE_RUN_TIME_STATS */
#if ( portUSING_MPU_WRAPPERS == 1 )
{
vPortStoreTaskMPUSettings( &( pxNewTCB->xMPUSettings ), xRegions, pxNewTCB->pxStack, ulStackDepth );
}
#else
{
/* Avoid compiler warning about unreferenced parameter. */
( void ) xRegions;
}
#endif
#if( configNUM_THREAD_LOCAL_STORAGE_POINTERS != 0 )
{
for( x = 0; x < ( UBaseType_t ) configNUM_THREAD_LOCAL_STORAGE_POINTERS; x++ )
{
pxNewTCB->pvThreadLocalStoragePointers[ x ] = NULL;
}
}
#endif
#if ( configUSE_TASK_NOTIFICATIONS == 1 )
{
pxNewTCB->ulNotifiedValue = 0;
pxNewTCB->ucNotifyState = taskNOT_WAITING_NOTIFICATION;
}
#endif
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
/* Initialise this task's Newlib reent structure. */
_REENT_INIT_PTR( ( &( pxNewTCB->xNewLib_reent ) ) );
}
#endif
#if( INCLUDE_xTaskAbortDelay == 1 )
{
pxNewTCB->ucDelayAborted = pdFALSE;
}
#endif
/* Initialize the TCB stack to look as if the task was already running,
but had been interrupted by the scheduler. The return address is set
to the start of the task function. Once the stack has been initialised
the top of stack variable is updated. */
#if( portUSING_MPU_WRAPPERS == 1 )
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters, xRunPrivileged );
}
#else /* portUSING_MPU_WRAPPERS */
{
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters );
}
#endif /* portUSING_MPU_WRAPPERS */
if( ( void * ) pxCreatedTask != NULL )
{
/* Pass the handle out in an anonymous way. The handle can be used to
change the created task's priority, delete the created task, etc.*/
*pxCreatedTask = ( TaskHandle_t ) pxNewTCB;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
prvInitialiseNewTask函数主要做如下初始化:
- 将栈空间初始化为0xa5(tskSTACK_FILL_BYTE);
- 根据栈生长方向计算pxTopOfStack临时变量,如果是向上生长,还需计算pxNewTCB->pxEndOfStack;
- 初始化任务名;
- 初始化任务优先级,优先级最大为configMAX_PRIORITIES - 1;
- 初始化链表节点xStateListItem和xEventListItem,将两个节点的owner指向当前任务TCB,将xEventListItem节点的value设置为优先级(configMAX_PRIORITIES - uxPriority);
- 调用pxPortInitialiseStack初始化任务栈空间(函数和体系架构相关),并将返回值赋予pxNewTCB->pxTopOfStack,指向栈顶;
- 出参pxCreatedTask指向当前任务块;
prvAddNewTaskToReadyList实现:
static void prvAddNewTaskToReadyList( TCB_t *pxNewTCB )
{
/* Ensure interrupts don't access the task lists while the lists are being
updated. */
taskENTER_CRITICAL();
{
uxCurrentNumberOfTasks++;
if( pxCurrentTCB == NULL )
{
/* There are no other tasks, or all the other tasks are in
the suspended state - make this the current task. */
pxCurrentTCB = pxNewTCB;
if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 )
{
/* This is the first task to be created so do the preliminary
initialisation required. We will not recover if this call
fails, but we will report the failure. */
prvInitialiseTaskLists();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
/* If the scheduler is not already running, make this task the
current task if it is the highest priority task to be created
so far. */
if( xSchedulerRunning == pdFALSE )
{
if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority )
{
pxCurrentTCB = pxNewTCB;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
uxTaskNumber++;
#if ( configUSE_TRACE_FACILITY == 1 )
{
/* Add a counter into the TCB for tracing only. */
pxNewTCB->uxTCBNumber = uxTaskNumber;
}
#endif /* configUSE_TRACE_FACILITY */
traceTASK_CREATE( pxNewTCB );
prvAddTaskToReadyList( pxNewTCB );
portSETUP_TCB( pxNewTCB );
}
taskEXIT_CRITICAL();
if( xSchedulerRunning != pdFALSE )
{
/* If the created task is of a higher priority than the current task
then it should run now. */
if( pxCurrentTCB->uxPriority < pxNewTCB->uxPriority )
{
taskYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
static void prvInitialiseTaskLists( void )
{
UBaseType_t uxPriority;
for( uxPriority = ( UBaseType_t ) 0U; uxPriority < ( UBaseType_t ) configMAX_PRIORITIES; uxPriority++ )
{
vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) );
}
vListInitialise( &xDelayedTaskList1 );
vListInitialise( &xDelayedTaskList2 );
vListInitialise( &xPendingReadyList );
#if ( INCLUDE_vTaskDelete == 1 )
{
vListInitialise( &xTasksWaitingTermination );
}
#endif /* INCLUDE_vTaskDelete */
#if ( INCLUDE_vTaskSuspend == 1 )
{
vListInitialise( &xSuspendedTaskList );
}
#endif /* INCLUDE_vTaskSuspend */
/* Start with pxDelayedTaskList using list1 and the pxOverflowDelayedTaskList
using list2. */
pxDelayedTaskList = &xDelayedTaskList1;
pxOverflowDelayedTaskList = &xDelayedTaskList2;
}
prvAddNewTaskToReadyList主要流程如下:
- 进临界区,关中断;
- 累加uxCurrentNumberOfTasks计数;
- pxCurrentTCB == NULL?
- 是,将pxCurrentTCB 指向新任务TCB,如果是创建首个任务,调用prvInitialiseTaskLists(调用vListInitialise初始化几个链表);
- 否,如果调度器未启动,且新任务优先级高于当前,将pxCurrentTCB 指向新任务TCB;
- uxTaskNumber++,更新TCB的uxTaskNumber;
- prvAddTaskToReadyList(将新任务加入就绪链表);
- 出临界区,开中断;
- 如果调度器已启动,且新任务优先级高于当前,则让步进行任务切换(taskYIELD_IF_USING_PREEMPTION);
调度器是否已经启动的判断,是根据xSchedulerRunning标志,和调度器是否挂起是两码事,vTaskStartScheduler调用后即启动,vTaskStartScheduler未调用或vTaskEndScheduler调用后即未启动;
prvAddTaskToReadyList将任务加入就绪链表,等待调度执行。
/*
* Place the task represented by pxTCB into the appropriate ready list for
* the task. It is inserted at the end of the list.
*/
#define prvAddTaskToReadyList( pxTCB ) \
traceMOVED_TASK_TO_READY_STATE( pxTCB ); \
taskRECORD_READY_PRIORITY( ( pxTCB )->uxPriority ); \
vListInsertEnd( &( pxReadyTasksLists[ ( pxTCB )->uxPriority ] ), &( ( pxTCB )->xStateListItem ) ); \
tracePOST_MOVED_TASK_TO_READY_STATE( pxTCB )
/* A port optimised version is provided. Call the port defined macros. */
#define taskRECORD_READY_PRIORITY( uxPriority ) portRECORD_READY_PRIORITY( uxPriority, uxTopReadyPriority )
插入就绪链表调用的是vListInsertEnd,它是在当前节点前插入,详见FreeRTOS--链表
taskRECORD_READY_PRIORITY用于记录就绪链表内任务的优先级,它调用portRECORD_READY_PRIORITY,具体实现和体系结构相关,在RVDS/ARM_CM3中是将优先级记录在uxReadyPriorities,按位记录,实现如下:
#define portRECORD_READY_PRIORITY( uxPriority, uxReadyPriorities ) ( uxReadyPriorities ) |= ( 1UL << ( uxPriority ) )
以上为动态创建任务的整个过程,FreeRTOS还支持静态创建方式(xTaskCreateStatic),大致实现一致,只是静态创建需要在外部自行分配好TCB和栈空间;
4.3.1.2 销毁
#if ( INCLUDE_vTaskDelete == 1 )
void vTaskDelete( TaskHandle_t xTaskToDelete )
{
TCB_t *pxTCB;
taskENTER_CRITICAL();
{
/* If null is passed in here then it is the calling task that is
being deleted. */
pxTCB = prvGetTCBFromHandle( xTaskToDelete );
/* Remove task from the ready list. */
if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
taskRESET_READY_PRIORITY( pxTCB->uxPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Is the task waiting on an event also? */
if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL )
{
( void ) uxListRemove( &( pxTCB->xEventListItem ) );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Increment the uxTaskNumber also so kernel aware debuggers can
detect that the task lists need re-generating. This is done before
portPRE_TASK_DELETE_HOOK() as in the Windows port that macro will
not return. */
uxTaskNumber++;
if( pxTCB == pxCurrentTCB )
{
/* A task is deleting itself. This cannot complete within the
task itself, as a context switch to another task is required.
Place the task in the termination list. The idle task will
check the termination list and free up any memory allocated by
the scheduler for the TCB and stack of the deleted task. */
vListInsertEnd( &xTasksWaitingTermination, &( pxTCB->xStateListItem ) );
/* Increment the ucTasksDeleted variable so the idle task knows
there is a task that has been deleted and that it should therefore
check the xTasksWaitingTermination list. */
++uxDeletedTasksWaitingCleanUp;
/* The pre-delete hook is primarily for the Windows simulator,
in which Windows specific clean up operations are performed,
after which it is not possible to yield away from this task -
hence xYieldPending is used to latch that a context switch is
required. */
portPRE_TASK_DELETE_HOOK( pxTCB, &xYieldPending );
}
else
{
--uxCurrentNumberOfTasks;
prvDeleteTCB( pxTCB );
/* Reset the next expected unblock time in case it referred to
the task that has just been deleted. */
prvResetNextTaskUnblockTime();
}
traceTASK_DELETE( pxTCB );
}
taskEXIT_CRITICAL();
/* Force a reschedule if it is the currently running task that has just
been deleted. */
if( xSchedulerRunning != pdFALSE )
{
if( pxTCB == pxCurrentTCB )
{
configASSERT( uxSchedulerSuspended == 0 );
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
#endif /* INCLUDE_vTaskDelete */
删除任务流程如下:
- 进临界区,关中断;
- 调用prvGetTCBFromHandle,获取任务TCB,如果参数xTaskToDelete为NULL则返回当前任务TCB,即自己,否则返回指定任务TCB;
- 将任务TCB从状态列表移除(移除xStateListItem),状态列表可能为ready、suspended、delay,对应删除的任务可能位于就绪态或运行态、暂停态、阻塞态。如果位于就绪链表,且删除后就绪链表为空,则重置优先级bit表(taskRESET_READY_PRIORITY);
- 如果任务在等待某事件(xEventListItem位于某个事件列表中),将xEventListItem从事件列表移除;
- 累加uxTaskNumber,用于调试;
- 删除的任务是自身还是其他?
- 自杀,将自身移入状态列表TasksWaitingTermination,交由idle任务删除(主要是回收内存);
- 他杀,递减uxCurrentNumberOfTasks计数,调用prvDeleteTCB回收TCB和栈内存资源。调用prvResetNextTaskUnblockTime,重置最近待唤醒任务的唤醒时刻(因为删除的任务可能就是刚好最近要唤醒的)。
- 出临界区,开中断;
- 调度器是否已启动,是的话,而且是自杀,则主动让步切换任务(portYIELD_WITHIN_API);
vTaskDelete可以删除自己,也可以删除其他任务,当入参为NULL时,删除自己。
相关的宏源码:
#define prvGetTCBFromHandle( pxHandle ) ( ( ( pxHandle ) == NULL ) ? ( TCB_t * ) pxCurrentTCB : ( TCB_t * ) ( pxHandle ) )
#define taskRESET_READY_PRIORITY( uxPriority ) \
{ \
if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ ( uxPriority ) ] ) ) == ( UBaseType_t ) 0 ) \
{ \
portRESET_READY_PRIORITY( ( uxPriority ), ( uxTopReadyPriority ) ); \
} \
}
4.3.2 任务的挂起与恢复
4.3.2.1 挂起
#if ( INCLUDE_vTaskSuspend == 1 )
void vTaskSuspend( TaskHandle_t xTaskToSuspend )
{
TCB_t *pxTCB;
taskENTER_CRITICAL();
{
/* If null is passed in here then it is the running task that is
being suspended. */
pxTCB = prvGetTCBFromHandle( xTaskToSuspend );
traceTASK_SUSPEND( pxTCB );
/* Remove task from the ready/delayed list and place in the
suspended list. */
if( uxListRemove( &( pxTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
taskRESET_READY_PRIORITY( pxTCB->uxPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Is the task waiting on an event also? */
if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL )
{
( void ) uxListRemove( &( pxTCB->xEventListItem ) );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
vListInsertEnd( &xSuspendedTaskList, &( pxTCB->xStateListItem ) );
}
taskEXIT_CRITICAL();
if( xSchedulerRunning != pdFALSE )
{
/* Reset the next expected unblock time in case it referred to the
task that is now in the Suspended state. */
taskENTER_CRITICAL();
{
prvResetNextTaskUnblockTime();
}
taskEXIT_CRITICAL();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
if( pxTCB == pxCurrentTCB )
{
if( xSchedulerRunning != pdFALSE )
{
/* The current task has just been suspended. */
configASSERT( uxSchedulerSuspended == 0 );
portYIELD_WITHIN_API();
}
else
{
/* The scheduler is not running, but the task that was pointed
to by pxCurrentTCB has just been suspended and pxCurrentTCB
must be adjusted to point to a different task. */
if( listCURRENT_LIST_LENGTH( &xSuspendedTaskList ) == uxCurrentNumberOfTasks )
{
/* No other tasks are ready, so set pxCurrentTCB back to
NULL so when the next task is created pxCurrentTCB will
be set to point to it no matter what its relative priority
is. */
pxCurrentTCB = NULL;
}
else
{
vTaskSwitchContext();
}
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* INCLUDE_vTaskSuspend */
挂起任务的流程如下:
- 进临界区,关中断;
- 调用prvGetTCBFromHandle,获取任务TCB,如果参数xTaskToDelete为NULL则返回当前任务TCB,即自己,否则返回指定任务TCB;
- 将任务TCB从状态列表移除(移除xStateListItem),状态列表可能为ready、delay,对应删除的任务可能位于就绪态或运行态、阻塞态。如果位于就绪链表,且删除后就绪链表为空,则重置优先级bit表(taskRESET_READY_PRIORITY);
- 如果任务在等待某事件(xEventListItem位于某个事件列表中),将xEventListItem从事件列表移除;(到此为止操作同任务删除)
- 将任务加入状态列表xSuspendedTaskList,列表内的任务均为暂停态;
- 出临界区,开中断;
- 调度器是否已启动,是的话,在临界区内调用prvResetNextTaskUnblockTime,重置最近待唤醒任务的唤醒时刻(因为要挂起的任务可能就是刚好最近要唤醒的)。
- 如果是挂起自身,调度器是否启动?
- 已启动,主动让步切换任务(portYIELD_WITHIN_API);
- 未启动,如果所有任务都挂起了,没有任务运行,将pxCurrentTCB置NULL,否则调用vTaskSwitchContext进行任务上下文切换;
vTaskSuspend可以挂起自己,也可以挂起其他任务,当入参为NULL时,挂起自己。
vTaskSuspend挂起的任务可以是就绪态,也可以是阻塞态、运行态。
vTaskSwitchContext实现:
void vTaskSwitchContext( void )
{
if( uxSchedulerSuspended != ( UBaseType_t ) pdFALSE )
{
/* The scheduler is currently suspended - do not allow a context
switch. */
xYieldPending = pdTRUE;
}
else
{
xYieldPending = pdFALSE;
traceTASK_SWITCHED_OUT();
#if ( configGENERATE_RUN_TIME_STATS == 1 )
{
#ifdef portALT_GET_RUN_TIME_COUNTER_VALUE
portALT_GET_RUN_TIME_COUNTER_VALUE( ulTotalRunTime );
#else
ulTotalRunTime = portGET_RUN_TIME_COUNTER_VALUE();
#endif
/* Add the amount of time the task has been running to the
accumulated time so far. The time the task started running was
stored in ulTaskSwitchedInTime. Note that there is no overflow
protection here so count values are only valid until the timer
overflows. The guard against negative values is to protect
against suspect run time stat counter implementations - which
are provided by the application, not the kernel. */
if( ulTotalRunTime > ulTaskSwitchedInTime )
{
pxCurrentTCB->ulRunTimeCounter += ( ulTotalRunTime - ulTaskSwitchedInTime );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
ulTaskSwitchedInTime = ulTotalRunTime;
}
#endif /* configGENERATE_RUN_TIME_STATS */
/* Check for stack overflow, if configured. */
taskCHECK_FOR_STACK_OVERFLOW();
/* Select a new task to run using either the generic C or port
optimised asm code. */
taskSELECT_HIGHEST_PRIORITY_TASK();
traceTASK_SWITCHED_IN();
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
/* Switch Newlib's _impure_ptr variable to point to the _reent
structure specific to this task. */
_impure_ptr = &( pxCurrentTCB->xNewLib_reent );
}
#endif /* configUSE_NEWLIB_REENTRANT */
}
}
可见,当调度器挂起(uxSchedulerSuspended == pdTRUE)的时候,不会进行任务切换,而是仅将全局变量xYieldPending置为pdTRUE,标识“待让步”就退出;
如果调度器非挂起,调用taskSELECT_HIGHEST_PRIORITY_TASK来切换任务;
#define taskSELECT_HIGHEST_PRIORITY_TASK() \
{ \
UBaseType_t uxTopPriority; \
\
/* Find the highest priority list that contains ready tasks. */ \
portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority ); \
configASSERT( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ uxTopPriority ] ) ) > 0 ); \
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); \
} /* taskSELECT_HIGHEST_PRIORITY_TASK() */
taskSELECT_HIGHEST_PRIORITY_TASK主要做:
- 查找就绪任务的最高优先级;
- 根据优先级找到对应的就绪链表,找下一个待运行的任务,将pxCurrentTCB指向该任务的TCB;
对于同优先级的任务,是轮流被调度的。前面可见,将任务加入就绪链表,prvAddTaskToReadyList调用的是vListInsertEnd接口,它是在当前节点pxIndex前插入,而链表遍历的顺序是从pxIndex往后遍历(listGET_OWNER_OF_NEXT_ENTRY),这相当于,最后就绪的任务在最后才会被调度切换运行。
TODO:vTaskSwitchContext只是切换任务的上下文(TCB),如何切换的任务运行?
4.3.2.2 恢复
#if ( INCLUDE_vTaskSuspend == 1 )
void vTaskResume( TaskHandle_t xTaskToResume )
{
TCB_t * const pxTCB = ( TCB_t * ) xTaskToResume;
/* It does not make sense to resume the calling task. */
configASSERT( xTaskToResume );
/* The parameter cannot be NULL as it is impossible to resume the
currently executing task. */
if( ( pxTCB != NULL ) && ( pxTCB != pxCurrentTCB ) )
{
taskENTER_CRITICAL();
{
if( prvTaskIsTaskSuspended( pxTCB ) != pdFALSE )
{
traceTASK_RESUME( pxTCB );
/* As we are in a critical section we can access the ready
lists even if the scheduler is suspended. */
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
prvAddTaskToReadyList( pxTCB );
/* We may have just resumed a higher priority task. */
if( pxTCB->uxPriority >= pxCurrentTCB->uxPriority )
{
/* This yield may not cause the task just resumed to run,
but will leave the lists in the correct state for the
next yield. */
taskYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* INCLUDE_vTaskSuspend */
vTaskResume用来恢复任务,只可能恢复其他任务,不可能恢复自身(因为自身都已经是运行态了)。
恢复的流程:
- 参数检查,需满足( pxTCB != NULL ) && ( pxTCB != pxCurrentTCB );
- 进临界区,关中断;
- 检查任务是否挂起(prvTaskIsTaskSuspended),不是的话退出临界区,退出函数;
- 将任务从状态链表(xSuspendedTaskList)移除,并重新移入就绪链表;
- 如果恢复的任务优先级大于等于当前任务优先级,主动让步切换任务(taskYIELD_IF_USING_PREEMPTION);
- 出临界区,开中断;
prvTaskIsTaskSuspended实现:
#if ( INCLUDE_vTaskSuspend == 1 )
static BaseType_t prvTaskIsTaskSuspended( const TaskHandle_t xTask )
{
BaseType_t xReturn = pdFALSE;
const TCB_t * const pxTCB = ( TCB_t * ) xTask;
/* Accesses xPendingReadyList so must be called from a critical
section. */
/* It does not make sense to check if the calling task is suspended. */
configASSERT( xTask );
/* Is the task being resumed actually in the suspended list? */
if( listIS_CONTAINED_WITHIN( &xSuspendedTaskList, &( pxTCB->xStateListItem ) ) != pdFALSE )
{
/* Has the task already been resumed from within an ISR? */
if( listIS_CONTAINED_WITHIN( &xPendingReadyList, &( pxTCB->xEventListItem ) ) == pdFALSE )
{
/* Is it in the suspended list because it is in the Suspended
state, or because is is blocked with no timeout? */
if( listIS_CONTAINED_WITHIN( NULL, &( pxTCB->xEventListItem ) ) != pdFALSE )
{
xReturn = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
return xReturn;
} /*lint !e818 xTask cannot be a pointer to const because it is a typedef. */
#endif /* INCLUDE_vTaskSuspend */
prvTaskIsTaskSuspended判断任务是否可以恢复(可以就绪或切换运行),它有三个检测条件,必须同时满足:
- 任务是暂停态,位于xSuspendedTaskList状态列表中;
- 不是处于待就绪状态(等待的事件已发生,但由于调度器挂起而暂存在xPendingReadyList列表中,而且此时归属的还是暂停态,xStateListItem并没有从xSuspendedTaskList列表移除);
- 没有在等待某事件(xEventListItem不在任何事件列表中);
所以,vTaskResume能恢复的任务只有:处于暂停态且没有等待事件的任务。对于处于暂停态且等待事件已发生待就绪的任务,在恢复调度器的时候恢复就绪;
4.3.3 调度器的挂起和恢复
4.3.3.1 调度器挂起
void vTaskSuspendAll( void )
{
/* A critical section is not required as the variable is of type
BaseType_t. Please read Richard Barry's reply in the following link to a
post in the FreeRTOS support forum before reporting this as a bug! -
http://goo.gl/wu4acr */
++uxSchedulerSuspended;
}
vTaskSuspendAll接口用来挂起调度器,是否挂起时通过标记字段uxSchedulerSuspended > 0来判断的, 所以挂起时的操作只是累加uxSchedulerSuspended;
4.3.3.2 调度器恢复
BaseType_t xTaskResumeAll( void )
{
TCB_t *pxTCB = NULL;
BaseType_t xAlreadyYielded = pdFALSE;
/* If uxSchedulerSuspended is zero then this function does not match a
previous call to vTaskSuspendAll(). */
configASSERT( uxSchedulerSuspended );
/* It is possible that an ISR caused a task to be removed from an event
list while the scheduler was suspended. If this was the case then the
removed task will have been added to the xPendingReadyList. Once the
scheduler has been resumed it is safe to move all the pending ready
tasks from this list into their appropriate ready list. */
taskENTER_CRITICAL();
{
--uxSchedulerSuspended;
if( uxSchedulerSuspended == ( UBaseType_t ) pdFALSE )
{
if( uxCurrentNumberOfTasks > ( UBaseType_t ) 0U )
{
/* Move any readied tasks from the pending list into the
appropriate ready list. */
while( listLIST_IS_EMPTY( &xPendingReadyList ) == pdFALSE )
{
pxTCB = ( TCB_t * ) listGET_OWNER_OF_HEAD_ENTRY( ( &xPendingReadyList ) );
( void ) uxListRemove( &( pxTCB->xEventListItem ) );
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
prvAddTaskToReadyList( pxTCB );
/* If the moved task has a priority higher than the current
task then a yield must be performed. */
if( pxTCB->uxPriority >= pxCurrentTCB->uxPriority )
{
xYieldPending = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
if( pxTCB != NULL )
{
/* A task was unblocked while the scheduler was suspended,
which may have prevented the next unblock time from being
re-calculated, in which case re-calculate it now. Mainly
important for low power tickless implementations, where
this can prevent an unnecessary exit from low power
state. */
prvResetNextTaskUnblockTime();
}
/* If any ticks occurred while the scheduler was suspended then
they should be processed now. This ensures the tick count does
not slip, and that any delayed tasks are resumed at the correct
time. */
{
UBaseType_t uxPendedCounts = uxPendedTicks; /* Non-volatile copy. */
if( uxPendedCounts > ( UBaseType_t ) 0U )
{
do
{
if( xTaskIncrementTick() != pdFALSE )
{
xYieldPending = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
--uxPendedCounts;
} while( uxPendedCounts > ( UBaseType_t ) 0U );
uxPendedTicks = 0;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
if( xYieldPending != pdFALSE )
{
#if( configUSE_PREEMPTION != 0 )
{
xAlreadyYielded = pdTRUE;
}
#endif
taskYIELD_IF_USING_PREEMPTION();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
taskEXIT_CRITICAL();
return xAlreadyYielded;
}
xTaskResumeAll接口用来恢复调度器,恢复调度器的流程:
- 进临界区关中断;
- 递减uxSchedulerSuspended字段,只当uxSchedulerSuspended == 0(pdFALSE)时才做恢复,即挂起多少次就要恢复多少次;
- 如果uxSchedulerSuspended == 0,且当前任务数大于0,将所有待就绪的任务(处于xPendingReadyList中)移至就绪链表,具体操作如下:
- 将任务从事件列表中移除;
- 将任务从状态列表中移除;
- 将任务移除就绪状态列表中;
- 优先级判断,恢复的任务是否大于等于当前任务优先级,是的话,xYieldPending置pdTRUE表示需要让步切换;
- 如果有任务恢复,还要重置下一唤醒任务的等待tick(调用prvResetNextTaskUnblockTime);
- 检查uxPendedTicks,如果大于0,需要消除调度器挂起期间造成的影响,恢复时钟滴答的处理,因为在挂起期间,时钟滴答只累加了uxPendedTicks标识,而不做具体的处理,这一部分需要在调度器恢复时做补偿(具体看后续的xTaskIncrementTick分析);
- 如果xYieldPending为pdTRUE,则进行任务让步切换(taskYIELD_IF_USING_PREEMPTION);
- 出临界区开中断,函数返回xAlreadyYielded表示是否已经做了让步切换;
4.3.4 启动任务调度
void vTaskStartScheduler( void )
{
BaseType_t xReturn;
/* Add the idle task at the lowest priority. */
#if( configSUPPORT_STATIC_ALLOCATION == 1 )
{
StaticTask_t *pxIdleTaskTCBBuffer = NULL;
StackType_t *pxIdleTaskStackBuffer = NULL;
uint32_t ulIdleTaskStackSize;
/* The Idle task is created using user provided RAM - obtain the
address of the RAM then create the idle task. */
vApplicationGetIdleTaskMemory( &pxIdleTaskTCBBuffer, &pxIdleTaskStackBuffer, &ulIdleTaskStackSize );
xIdleTaskHandle = xTaskCreateStatic( prvIdleTask,
"IDLE",
ulIdleTaskStackSize,
( void * ) NULL,
( tskIDLE_PRIORITY | portPRIVILEGE_BIT ),
pxIdleTaskStackBuffer,
pxIdleTaskTCBBuffer ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */
if( xIdleTaskHandle != NULL )
{
xReturn = pdPASS;
}
else
{
xReturn = pdFAIL;
}
}
#else
{
/* The Idle task is being created using dynamically allocated RAM. */
xReturn = xTaskCreate( prvIdleTask,
"IDLE", configMINIMAL_STACK_SIZE,
( void * ) NULL,
( tskIDLE_PRIORITY | portPRIVILEGE_BIT ),
&xIdleTaskHandle ); /*lint !e961 MISRA exception, justified as it is not a redundant explicit cast to all supported compilers. */
}
#endif /* configSUPPORT_STATIC_ALLOCATION */
#if ( configUSE_TIMERS == 1 )
{
if( xReturn == pdPASS )
{
xReturn = xTimerCreateTimerTask();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_TIMERS */
if( xReturn == pdPASS )
{
/* Interrupts are turned off here, to ensure a tick does not occur
before or during the call to xPortStartScheduler(). The stacks of
the created tasks contain a status word with interrupts switched on
so interrupts will automatically get re-enabled when the first task
starts to run. */
portDISABLE_INTERRUPTS();
#if ( configUSE_NEWLIB_REENTRANT == 1 )
{
/* Switch Newlib's _impure_ptr variable to point to the _reent
structure specific to the task that will run first. */
_impure_ptr = &( pxCurrentTCB->xNewLib_reent );
}
#endif /* configUSE_NEWLIB_REENTRANT */
xNextTaskUnblockTime = portMAX_DELAY;
xSchedulerRunning = pdTRUE;
xTickCount = ( TickType_t ) 0U;
/* If configGENERATE_RUN_TIME_STATS is defined then the following
macro must be defined to configure the timer/counter used to generate
the run time counter time base. */
portCONFIGURE_TIMER_FOR_RUN_TIME_STATS();
/* Setting up the timer tick is hardware specific and thus in the
portable interface. */
if( xPortStartScheduler() != pdFALSE )
{
/* Should not reach here as if the scheduler is running the
function will not return. */
}
else
{
/* Should only reach here if a task calls xTaskEndScheduler(). */
}
}
else
{
/* This line will only be reached if the kernel could not be started,
because there was not enough FreeRTOS heap to create the idle task
or the timer task. */
configASSERT( xReturn != errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY );
}
/* Prevent compiler warnings if INCLUDE_xTaskGetIdleTaskHandle is set to 0,
meaning xIdleTaskHandle is not used anywhere else. */
( void ) xIdleTaskHandle;
}
启动任务调度,即启动调度器,流程如下:
- 创建空闲任务,空闲任务优先级最低,空闲任务的执行函数为prvIdleTask;
- 如果开启了configUSE_TIMERS,则创建定时器任务;
- 如果创建任务成功,则:
- 关中断;
- 初始化xNextTaskUnblockTime、xSchedulerRunning和xTickCount;
- 调用xPortStartScheduler启动调度器,具体实现和体系结构相关;
- 返回空闲任务句柄;
函数中只关了中断,没有再次开启,因为当第一个任务开始启动的时候,中断会重新开启。
基于RVDS/ARM_CM3,看下xPortStartScheduler是如何启动调度器的
BaseType_t xPortStartScheduler( void )
{
#if( configASSERT_DEFINED == 1 )
{
volatile uint32_t ulOriginalPriority;
volatile uint8_t * const pucFirstUserPriorityRegister = ( uint8_t * ) ( portNVIC_IP_REGISTERS_OFFSET_16 + portFIRST_USER_INTERRUPT_NUMBER );
volatile uint8_t ucMaxPriorityValue;
/* Determine the maximum priority from which ISR safe FreeRTOS API
functions can be called. ISR safe functions are those that end in
"FromISR". FreeRTOS maintains separate thread and ISR API functions to
ensure interrupt entry is as fast and simple as possible.
Save the interrupt priority value that is about to be clobbered. */
ulOriginalPriority = *pucFirstUserPriorityRegister;
/* Determine the number of priority bits available. First write to all
possible bits. */
*pucFirstUserPriorityRegister = portMAX_8_BIT_VALUE;
/* Read the value back to see how many bits stuck. */
ucMaxPriorityValue = *pucFirstUserPriorityRegister;
/* Use the same mask on the maximum system call priority. */
ucMaxSysCallPriority = configMAX_SYSCALL_INTERRUPT_PRIORITY & ucMaxPriorityValue;
/* Calculate the maximum acceptable priority group value for the number
of bits read back. */
ulMaxPRIGROUPValue = portMAX_PRIGROUP_BITS;
while( ( ucMaxPriorityValue & portTOP_BIT_OF_BYTE ) == portTOP_BIT_OF_BYTE )
{
ulMaxPRIGROUPValue--;
ucMaxPriorityValue <<= ( uint8_t ) 0x01;
}
/* Shift the priority group value back to its position within the AIRCR
register. */
ulMaxPRIGROUPValue <<= portPRIGROUP_SHIFT;
ulMaxPRIGROUPValue &= portPRIORITY_GROUP_MASK;
/* Restore the clobbered interrupt priority register to its original
value. */
*pucFirstUserPriorityRegister = ulOriginalPriority;
}
#endif /* conifgASSERT_DEFINED */
/* Make PendSV and SysTick the lowest priority interrupts. */
portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;
/* Start the timer that generates the tick ISR. Interrupts are disabled
here already. */
vPortSetupTimerInterrupt();
/* Initialise the critical nesting count ready for the first task. */
uxCriticalNesting = 0;
/* Start the first task. */
prvStartFirstTask();
/* Should not get here! */
return 0;
}
xPortStartScheduler主要是将PendSV和SysTick中断设置为低优先级,
/* Make PendSV and SysTick the lowest priority interrupts. */
portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;
然后调用vPortSetupTimerInterrupt函数设置SysTick中断产生的间隔,
/*
* Setup the SysTick timer to generate the tick interrupts at the required
* frequency.
*/
#if configOVERRIDE_DEFAULT_TICK_CONFIGURATION == 0
void vPortSetupTimerInterrupt( void )
{
/* Calculate the constants required to configure the tick interrupt. */
#if configUSE_TICKLESS_IDLE == 1
{
ulTimerCountsForOneTick = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ );
xMaximumPossibleSuppressedTicks = portMAX_24_BIT_NUMBER / ulTimerCountsForOneTick;
ulStoppedTimerCompensation = portMISSED_COUNTS_FACTOR / ( configCPU_CLOCK_HZ / configSYSTICK_CLOCK_HZ );
}
#endif /* configUSE_TICKLESS_IDLE */
/* Configure SysTick to interrupt at the requested rate. */
portNVIC_SYSTICK_LOAD_REG = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ) - 1UL;
portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT | portNVIC_SYSTICK_ENABLE_BIT );
}
#endif /* configOVERRIDE_DEFAULT_TICK_CONFIGURATION */
然后又调用prvStartFirstTask函数将SP指向中断向量表,然后进入SVC执行第一个任务函数。
__asm void prvStartFirstTask( void )
{
PRESERVE8
/* Use the NVIC offset register to locate the stack. */
ldr r0, =0xE000ED08
ldr r0, [r0]
ldr r0, [r0]
/* Set the msp back to the start of the stack. */
msr msp, r0
/* Globally enable interrupts. */
cpsie i
cpsie f
dsb
isb
/* Call SVC to start the first task. */
svc 0
nop
nop
}
PRESERVE8:当前堆栈以8字节对齐
LDR:用于加载32位的立即数或一个地址值到指定寄存器(LDR register,=expr/label_expr)
MSR:写特殊功能寄存器指令,存储(写)通用寄存器的值到特殊功能寄存器
CPSIE:开中断(I:IRQ中断,F:FIQ中断)
CPSID:关中断(I:IRQ中断,F:FIQ中断)
DSB:内存屏障,数据同步屏障,仅当所有在它前面的内存访问指令都执行完毕后,才会执行在它后面的指令,即任何指令都要等待DSB指令前面的内存访问指令完成。
ISB:内存屏障,指令同步屏障,确保所有在ISB指令之后的指令都从指令高速缓存或内存中重新预取。它刷新流水线(flush pipeline)和预取缓冲区后才会从指令高速缓存或者内存中预取ISB指令之后的指令。ISB指令通常用来保证上下文切换(如ASID更改、TLB维护操作等)的效果。
SVC:软中断指令,用于产生软中断,从而实现在用户模式变换到特权模式。SVC 通常用于在操作系统上请求特权操作或访问系统资源。
NOP:空操作伪指令,一般用于延时
LDMIA:加载多个字,并且在加载后自增基址寄存器,如:LDMIA R1!,{R2-R7,R12},将R1单元中的数据读出到R2-R7,R12,R1自动+1(!)
MOV:数据传输指令,只能在寄存器之间移动数据,或者把立即数移动到寄存器中,不能读写内存!
ORR:逻辑或,如:ORR R1, R2, R3 ; R1 = R2|R3
BX:跳转指令
MSP:是主堆栈指针
SVC(系统服务调用,亦简称系统调用)多用于在操作系统之上的软件开发中。SVC 用于产生系统函数的调用请求。例如,操作系统不让用户程序直接访问硬件,而是通过提供一些系统服务函数,用户程序使用 SVC 发出对系统服务函数的呼叫请求,以这种方法调用它们来间接访问硬件。因此,当用户程序想要控制特定的硬件时,它就会产生一个 SVC 异常,然后操作系统提供的 SVC 异常服务例程得到执行,它再调用相关的操作系统函数,后者完成用户程序请求的服务。
__asm void vPortSVCHandler( void )
{
PRESERVE8
ldr r3, =pxCurrentTCB /* Restore the context. */
ldr r1, [r3] /* Use pxCurrentTCBConst to get the pxCurrentTCB address. */
ldr r0, [r1] /* The first item in pxCurrentTCB is the task top of stack. */
ldmia r0!, {r4-r11} /* Pop the registers that are not automatically saved on exception entry and the critical nesting count. */
msr psp, r0 /* Restore the task stack pointer. */
isb
mov r0, #0
msr basepri, r0
orr r14, #0xd
bx r14
}
此段汇编代码的解释可参考关于FreeRTOS任务栈的那点事儿
4.3.5 空闲任务的职责
/*
* -----------------------------------------------------------
* The Idle task.
* ----------------------------------------------------------
*
* The portTASK_FUNCTION() macro is used to allow port/compiler specific
* language extensions. The equivalent prototype for this function is:
*
* void prvIdleTask( void *pvParameters );
*
*/
static portTASK_FUNCTION( prvIdleTask, pvParameters )
{
/* Stop warnings. */
( void ) pvParameters;
/** THIS IS THE RTOS IDLE TASK - WHICH IS CREATED AUTOMATICALLY WHEN THE
SCHEDULER IS STARTED. **/
for( ;; )
{
/* See if any tasks have deleted themselves - if so then the idle task
is responsible for freeing the deleted task's TCB and stack. */
prvCheckTasksWaitingTermination();
#if ( configUSE_PREEMPTION == 0 )
{
/* If we are not using preemption we keep forcing a task switch to
see if any other task has become available. If we are using
preemption we don't need to do this as any task becoming available
will automatically get the processor anyway. */
taskYIELD();
}
#endif /* configUSE_PREEMPTION */
#if ( ( configUSE_PREEMPTION == 1 ) && ( configIDLE_SHOULD_YIELD == 1 ) )
{
/* When using preemption tasks of equal priority will be
timesliced. If a task that is sharing the idle priority is ready
to run then the idle task should yield before the end of the
timeslice.
A critical region is not required here as we are just reading from
the list, and an occasional incorrect value will not matter. If
the ready list at the idle priority contains more than one task
then a task other than the idle task is ready to execute. */
if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ tskIDLE_PRIORITY ] ) ) > ( UBaseType_t ) 1 )
{
taskYIELD();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* ( ( configUSE_PREEMPTION == 1 ) && ( configIDLE_SHOULD_YIELD == 1 ) ) */
#if ( configUSE_IDLE_HOOK == 1 )
{
extern void vApplicationIdleHook( void );
/* Call the user defined function from within the idle task. This
allows the application designer to add background functionality
without the overhead of a separate task.
NOTE: vApplicationIdleHook() MUST NOT, UNDER ANY CIRCUMSTANCES,
CALL A FUNCTION THAT MIGHT BLOCK. */
vApplicationIdleHook();
}
#endif /* configUSE_IDLE_HOOK */
/* This conditional compilation should use inequality to 0, not equality
to 1. This is to ensure portSUPPRESS_TICKS_AND_SLEEP() is called when
user defined low power mode implementations require
configUSE_TICKLESS_IDLE to be set to a value other than 1. */
#if ( configUSE_TICKLESS_IDLE != 0 )
{
TickType_t xExpectedIdleTime;
/* It is not desirable to suspend then resume the scheduler on
each iteration of the idle task. Therefore, a preliminary
test of the expected idle time is performed without the
scheduler suspended. The result here is not necessarily
valid. */
xExpectedIdleTime = prvGetExpectedIdleTime();
if( xExpectedIdleTime >= configEXPECTED_IDLE_TIME_BEFORE_SLEEP )
{
vTaskSuspendAll();
{
/* Now the scheduler is suspended, the expected idle
time can be sampled again, and this time its value can
be used. */
configASSERT( xNextTaskUnblockTime >= xTickCount );
xExpectedIdleTime = prvGetExpectedIdleTime();
if( xExpectedIdleTime >= configEXPECTED_IDLE_TIME_BEFORE_SLEEP )
{
traceLOW_POWER_IDLE_BEGIN();
portSUPPRESS_TICKS_AND_SLEEP( xExpectedIdleTime );
traceLOW_POWER_IDLE_END();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
( void ) xTaskResumeAll();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_TICKLESS_IDLE */
}
}
idle任务主要做:
- 调用prvCheckTasksWaitingTermination对删除的任务进行内存资源回收;
- 如果禁用抢占(configUSE_PREEMPTION == 0),则调用taskYIELD()主动让步;
- 如果启用抢占,并且要求idle任务让步(( configUSE_PREEMPTION == 1 ) && ( configIDLE_SHOULD_YIELD == 1 )),当有任务于idle任务优先级相同时,让步给其他任务执行;
static void prvCheckTasksWaitingTermination( void )
{
/** THIS FUNCTION IS CALLED FROM THE RTOS IDLE TASK **/
#if ( INCLUDE_vTaskDelete == 1 )
{
BaseType_t xListIsEmpty;
/* ucTasksDeleted is used to prevent vTaskSuspendAll() being called
too often in the idle task. */
while( uxDeletedTasksWaitingCleanUp > ( UBaseType_t ) 0U )
{
vTaskSuspendAll();
{
xListIsEmpty = listLIST_IS_EMPTY( &xTasksWaitingTermination );
}
( void ) xTaskResumeAll();
if( xListIsEmpty == pdFALSE )
{
TCB_t *pxTCB;
taskENTER_CRITICAL();
{
pxTCB = ( TCB_t * ) listGET_OWNER_OF_HEAD_ENTRY( ( &xTasksWaitingTermination ) );
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
--uxCurrentNumberOfTasks;
--uxDeletedTasksWaitingCleanUp;
}
taskEXIT_CRITICAL();
prvDeleteTCB( pxTCB );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
#endif /* INCLUDE_vTaskDelete */
}
对于自杀的任务,其TCB和栈资源的回收,是交由idle任务执行的。任务自杀时,是将自身移入xTasksWaitingTermination列表,并累加uxDeletedTasksWaitingCleanUp。在idle任务中,检查
xTasksWaitingTermination列表并对其内的任务进行资源回收;
4.3.6 任务间的切换
基于RVDS/ARM_CM3分析
由系统滴答中断处理,调用xTaskIncrementTick判断是否需要进行任务切换(函数返回pdTRUE代表需要切换),并同时产生PendSV中断进行任务切换。
函数定义在port.c
void xPortSysTickHandler( void )
{
/* The SysTick runs at the lowest interrupt priority, so when this interrupt
executes all interrupts must be unmasked. There is therefore no need to
save and then restore the interrupt mask value as its value is already
known - therefore the slightly faster vPortRaiseBASEPRI() function is used
in place of portSET_INTERRUPT_MASK_FROM_ISR(). */
vPortRaiseBASEPRI();
{
/* Increment the RTOS tick. */
if( xTaskIncrementTick() != pdFALSE )
{
/* A context switch is required. Context switching is performed in
the PendSV interrupt. Pend the PendSV interrupt. */
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;
}
}
vPortClearBASEPRIFromISR();
}
xTaskIncrementTick函数定义在task.c
BaseType_t xTaskIncrementTick( void )
{
TCB_t * pxTCB;
TickType_t xItemValue;
BaseType_t xSwitchRequired = pdFALSE;
/* Called by the portable layer each time a tick interrupt occurs.
Increments the tick then checks to see if the new tick value will cause any
tasks to be unblocked. */
traceTASK_INCREMENT_TICK( xTickCount );
if( uxSchedulerSuspended == ( UBaseType_t ) pdFALSE )
{
/* Minor optimisation. The tick count cannot change in this
block. */
const TickType_t xConstTickCount = xTickCount + 1;
/* Increment the RTOS tick, switching the delayed and overflowed
delayed lists if it wraps to 0. */
xTickCount = xConstTickCount;
if( xConstTickCount == ( TickType_t ) 0U )
{
taskSWITCH_DELAYED_LISTS();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* See if this tick has made a timeout expire. Tasks are stored in
the queue in the order of their wake time - meaning once one task
has been found whose block time has not expired there is no need to
look any further down the list. */
if( xConstTickCount >= xNextTaskUnblockTime )
{
for( ;; )
{
if( listLIST_IS_EMPTY( pxDelayedTaskList ) != pdFALSE )
{
/* The delayed list is empty. Set xNextTaskUnblockTime
to the maximum possible value so it is extremely
unlikely that the
if( xTickCount >= xNextTaskUnblockTime ) test will pass
next time through. */
xNextTaskUnblockTime = portMAX_DELAY; /*lint !e961 MISRA exception as the casts are only redundant for some ports. */
break;
}
else
{
/* The delayed list is not empty, get the value of the
item at the head of the delayed list. This is the time
at which the task at the head of the delayed list must
be removed from the Blocked state. */
pxTCB = ( TCB_t * ) listGET_OWNER_OF_HEAD_ENTRY( pxDelayedTaskList );
xItemValue = listGET_LIST_ITEM_VALUE( &( pxTCB->xStateListItem ) );
if( xConstTickCount < xItemValue )
{
/* It is not time to unblock this item yet, but the
item value is the time at which the task at the head
of the blocked list must be removed from the Blocked
state - so record the item value in
xNextTaskUnblockTime. */
xNextTaskUnblockTime = xItemValue;
break;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* It is time to remove the item from the Blocked state. */
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
/* Is the task waiting on an event also? If so remove
it from the event list. */
if( listLIST_ITEM_CONTAINER( &( pxTCB->xEventListItem ) ) != NULL )
{
( void ) uxListRemove( &( pxTCB->xEventListItem ) );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Place the unblocked task into the appropriate ready
list. */
prvAddTaskToReadyList( pxTCB );
/* A task being unblocked cannot cause an immediate
context switch if preemption is turned off. */
#if ( configUSE_PREEMPTION == 1 )
{
/* Preemption is on, but a context switch should
only be performed if the unblocked task has a
priority that is equal to or higher than the
currently executing task. */
if( pxTCB->uxPriority >= pxCurrentTCB->uxPriority )
{
xSwitchRequired = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_PREEMPTION */
}
}
}
/* Tasks of equal priority to the currently running task will share
processing time (time slice) if preemption is on, and the application
writer has not explicitly turned time slicing off. */
#if ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) )
{
if( listCURRENT_LIST_LENGTH( &( pxReadyTasksLists[ pxCurrentTCB->uxPriority ] ) ) > ( UBaseType_t ) 1 )
{
xSwitchRequired = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* ( ( configUSE_PREEMPTION == 1 ) && ( configUSE_TIME_SLICING == 1 ) ) */
#if ( configUSE_TICK_HOOK == 1 )
{
/* Guard against the tick hook being called when the pended tick
count is being unwound (when the scheduler is being unlocked). */
if( uxPendedTicks == ( UBaseType_t ) 0U )
{
vApplicationTickHook();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_TICK_HOOK */
}
else
{
++uxPendedTicks;
/* The tick hook gets called at regular intervals, even if the
scheduler is locked. */
#if ( configUSE_TICK_HOOK == 1 )
{
vApplicationTickHook();
}
#endif
}
#if ( configUSE_PREEMPTION == 1 )
{
if( xYieldPending != pdFALSE )
{
xSwitchRequired = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* configUSE_PREEMPTION */
return xSwitchRequired;
}
首先,xTaskIncrementTick在调度器挂起时仅累加uxPendedTicks,返回pdFALSE。在恢复调度器xTaskResumeAll时会根据uxPendedTicks重新调用xTaskIncrementTick进行补偿;
调度器没挂起的时候:
- 累加滴答计数xTickCount;如果计数值溢出,调用taskSWITCH_DELAYED_LISTS宏切换阻塞列表,并更新溢出次数;
- 如果有任务要唤醒了(xConstTickCount >= xNextTaskUnblockTime ),检查阻塞列表首个节点(代表最近的要唤醒的任务),检查其值,如果满足唤醒条件就唤醒(移除状态节点、事件节点,重新移入就绪链表,并根据优先级决定是否让步切换),返回pdTRUE,否则将xNextTaskUnblockTime更新为其value值;
真正的任务切换是有PendSV中断处理xPortPendSVHandler内执行,定义在port.c
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
mrs r0, psp
isb
ldr r3, =pxCurrentTCB /* Get the location of the current TCB. */
ldr r2, [r3]
stmdb r0!, {r4-r11} /* Save the remaining registers. */
str r0, [r2] /* Save the new top of stack into the first member of the TCB. */
stmdb sp!, {r3, r14}
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb
isb
bl vTaskSwitchContext
mov r0, #0
msr basepri, r0
ldmia sp!, {r3, r14}
ldr r1, [r3]
ldr r0, [r1] /* The first item in pxCurrentTCB is the task top of stack. */
ldmia r0!, {r4-r11} /* Pop the registers and the critical nesting count. */
msr psp, r0
isb
bx r14
nop
}
TODO,待研究实现,另,systic和pendsv的handle function是在哪里注册的?
4.4 任务等待事件
任务可以阻塞等待某些事件的发生。任务的TCB控制块中包含了xEventListItem节点,所有等待同一事件的任务都将加入同一事件链表,通过节点xEventListItem串联。
事件链表是按任务优先级排序的,最高优先级的任务在前。
在FreeRTOS--队列一节的源码分析中,经常用到如下两个接口,用来阻塞等待事件以及事件触发后唤醒等待的任务。比如发送时等待队列未满,接收时等待队列非空。
void vTaskPlaceOnEventList( List_t * const pxEventList, const TickType_t xTicksToWait );
BaseType_t xTaskRemoveFromEventList( const List_t * const pxEventList );
4.4.1 阻塞等待事件发生
vTaskPlaceOnEventList用来将任务阻塞并等待某一事件发生,源码如下:
void vTaskPlaceOnEventList( List_t * const pxEventList, const TickType_t xTicksToWait )
{
configASSERT( pxEventList );
/* THIS FUNCTION MUST BE CALLED WITH EITHER INTERRUPTS DISABLED OR THE
SCHEDULER SUSPENDED AND THE QUEUE BEING ACCESSED LOCKED. */
/* Place the event list item of the TCB in the appropriate event list.
This is placed in the list in priority order so the highest priority task
is the first to be woken by the event. The queue that contains the event
list is locked, preventing simultaneous access from interrupts. */
vListInsert( pxEventList, &( pxCurrentTCB->xEventListItem ) );
prvAddCurrentTaskToDelayedList( xTicksToWait, pdTRUE );
}
接口主要有两步操作:
- 将任务加入事件链表;
- 调用prvAddCurrentTaskToDelayedList将任务加入delay或suspended链表,任务阻塞;
static void prvAddCurrentTaskToDelayedList( TickType_t xTicksToWait, const BaseType_t xCanBlockIndefinitely )
{
TickType_t xTimeToWake;
const TickType_t xConstTickCount = xTickCount;
#if( INCLUDE_xTaskAbortDelay == 1 )
{
/* About to enter a delayed list, so ensure the ucDelayAborted flag is
reset to pdFALSE so it can be detected as having been set to pdTRUE
when the task leaves the Blocked state. */
pxCurrentTCB->ucDelayAborted = pdFALSE;
}
#endif
/* Remove the task from the ready list before adding it to the blocked list
as the same list item is used for both lists. */
if( uxListRemove( &( pxCurrentTCB->xStateListItem ) ) == ( UBaseType_t ) 0 )
{
/* The current task must be in a ready list, so there is no need to
check, and the port reset macro can be called directly. */
portRESET_READY_PRIORITY( pxCurrentTCB->uxPriority, uxTopReadyPriority );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
#if ( INCLUDE_vTaskSuspend == 1 )
{
if( ( xTicksToWait == portMAX_DELAY ) && ( xCanBlockIndefinitely != pdFALSE ) )
{
/* Add the task to the suspended task list instead of a delayed task
list to ensure it is not woken by a timing event. It will block
indefinitely. */
vListInsertEnd( &xSuspendedTaskList, &( pxCurrentTCB->xStateListItem ) );
}
else
{
/* Calculate the time at which the task should be woken if the event
does not occur. This may overflow but this doesn't matter, the
kernel will manage it correctly. */
xTimeToWake = xConstTickCount + xTicksToWait;
/* The list item will be inserted in wake time order. */
listSET_LIST_ITEM_VALUE( &( pxCurrentTCB->xStateListItem ), xTimeToWake );
if( xTimeToWake < xConstTickCount )
{
/* Wake time has overflowed. Place this item in the overflow
list. */
vListInsert( pxOverflowDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
}
else
{
/* The wake time has not overflowed, so the current block list
is used. */
vListInsert( pxDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
/* If the task entering the blocked state was placed at the
head of the list of blocked tasks then xNextTaskUnblockTime
needs to be updated too. */
if( xTimeToWake < xNextTaskUnblockTime )
{
xNextTaskUnblockTime = xTimeToWake;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
}
}
#else /* INCLUDE_vTaskSuspend */
{
/* Calculate the time at which the task should be woken if the event
does not occur. This may overflow but this doesn't matter, the kernel
will manage it correctly. */
xTimeToWake = xConstTickCount + xTicksToWait;
/* The list item will be inserted in wake time order. */
listSET_LIST_ITEM_VALUE( &( pxCurrentTCB->xStateListItem ), xTimeToWake );
if( xTimeToWake < xConstTickCount )
{
/* Wake time has overflowed. Place this item in the overflow list. */
vListInsert( pxOverflowDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
}
else
{
/* The wake time has not overflowed, so the current block list is used. */
vListInsert( pxDelayedTaskList, &( pxCurrentTCB->xStateListItem ) );
/* If the task entering the blocked state was placed at the head of the
list of blocked tasks then xNextTaskUnblockTime needs to be updated
too. */
if( xTimeToWake < xNextTaskUnblockTime )
{
xNextTaskUnblockTime = xTimeToWake;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
/* Avoid compiler warning when INCLUDE_vTaskSuspend is not 1. */
( void ) xCanBlockIndefinitely;
}
#endif /* INCLUDE_vTaskSuspend */
}
- 首先,将任务从就绪链表移除,并且,如果该优先级的就绪链表空了,调用portRESET_READY_PRIORITY清除此优先级在bit map中的对应bit位(uxTopReadyPriority为bit map,每一位记录是否有该优先级的任务就绪);
- 检查xTicksToWait和xCanBlockIndefinitely参数,如果是无限期阻塞,将任务加入suspended链表;
- 否则,计算唤醒时间,加入delay链表(需要考虑tick是否溢出,如果溢出,加入OverflowDelayed链表);
4.4.2 事件发生唤醒任务
xTaskRemoveFromEventList用于事件发生时将任务唤醒。
BaseType_t xTaskRemoveFromEventList( const List_t * const pxEventList )
{
TCB_t *pxUnblockedTCB;
BaseType_t xReturn;
/* THIS FUNCTION MUST BE CALLED FROM A CRITICAL SECTION. It can also be
called from a critical section within an ISR. */
/* The event list is sorted in priority order, so the first in the list can
be removed as it is known to be the highest priority. Remove the TCB from
the delayed list, and add it to the ready list.
If an event is for a queue that is locked then this function will never
get called - the lock count on the queue will get modified instead. This
means exclusive access to the event list is guaranteed here.
This function assumes that a check has already been made to ensure that
pxEventList is not empty. */
pxUnblockedTCB = ( TCB_t * ) listGET_OWNER_OF_HEAD_ENTRY( pxEventList );
configASSERT( pxUnblockedTCB );
( void ) uxListRemove( &( pxUnblockedTCB->xEventListItem ) );
if( uxSchedulerSuspended == ( UBaseType_t ) pdFALSE )
{
( void ) uxListRemove( &( pxUnblockedTCB->xStateListItem ) );
prvAddTaskToReadyList( pxUnblockedTCB );
}
else
{
/* The delayed and ready lists cannot be accessed, so hold this task
pending until the scheduler is resumed. */
vListInsertEnd( &( xPendingReadyList ), &( pxUnblockedTCB->xEventListItem ) );
}
if( pxUnblockedTCB->uxPriority > pxCurrentTCB->uxPriority )
{
/* Return true if the task removed from the event list has a higher
priority than the calling task. This allows the calling task to know if
it should force a context switch now. */
xReturn = pdTRUE;
/* Mark that a yield is pending in case the user is not using the
"xHigherPriorityTaskWoken" parameter to an ISR safe FreeRTOS function. */
xYieldPending = pdTRUE;
}
else
{
xReturn = pdFALSE;
}
#if( configUSE_TICKLESS_IDLE != 0 )
{
/* If a task is blocked on a kernel object then xNextTaskUnblockTime
might be set to the blocked task's time out time. If the task is
unblocked for a reason other than a timeout xNextTaskUnblockTime is
normally left unchanged, because it is automatically reset to a new
value when the tick count equals xNextTaskUnblockTime. However if
tickless idling is used it might be more important to enter sleep mode
at the earliest possible time - so reset xNextTaskUnblockTime here to
ensure it is updated at the earliest possible time. */
prvResetNextTaskUnblockTime();
}
#endif
return xReturn;
}
- 取事件链表头节点(最高优先级任务),将其从事件链表移除;
- 如果调度器没有挂起,将任务从当前的状态链表移除并加入就绪链表;
- 如果调度器挂起,将任务移入pending ready链表;
- 判断唤醒的任务优先级是否高于当前任务,是的话返回pdTRUE,并将xYieldPending置为pdTRUE,表示需要进行任务切换;
4.5 任务主动休眠
void vTaskDelay( const TickType_t xTicksToDelay ) PRIVILEGED_FUNCTION;
void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement ) PRIVILEGED_FUNCTION;
vTaskDelay用于任务主动休眠,参数xTicksToDelay代表休眠持续多少个tick;
#if ( INCLUDE_vTaskDelay == 1 )
void vTaskDelay( const TickType_t xTicksToDelay )
{
BaseType_t xAlreadyYielded = pdFALSE;
/* A delay time of zero just forces a reschedule. */
if( xTicksToDelay > ( TickType_t ) 0U )
{
configASSERT( uxSchedulerSuspended == 0 );
vTaskSuspendAll();
{
traceTASK_DELAY();
/* A task that is removed from the event list while the
scheduler is suspended will not get placed in the ready
list or removed from the blocked list until the scheduler
is resumed.
This task cannot be in an event list as it is the currently
executing task. */
prvAddCurrentTaskToDelayedList( xTicksToDelay, pdFALSE );
}
xAlreadyYielded = xTaskResumeAll();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
/* Force a reschedule if xTaskResumeAll has not already done so, we may
have put ourselves to sleep. */
if( xAlreadyYielded == pdFALSE )
{
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* INCLUDE_vTaskDelay */
流程如下:
- 挂起调度器;
- 调用prvAddCurrentTaskToDelayedList将任务加入delay链表;
- 恢复调度器;
- 判断是否需要任务切换(xTaskResumeAll返回pdTRUE代表需要有新的就绪任务比当前任务优先级高,需要让步)
vTaskDelayUntil用于任务主动休眠,参数pxPreviousWakeTime 表示上次的唤醒时刻,xTimeIncrement表示基于pxPreviousWakeTime,等待多少个tick后唤醒
#if ( INCLUDE_vTaskDelayUntil == 1 )
void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement )
{
TickType_t xTimeToWake;
BaseType_t xAlreadyYielded, xShouldDelay = pdFALSE;
configASSERT( pxPreviousWakeTime );
configASSERT( ( xTimeIncrement > 0U ) );
configASSERT( uxSchedulerSuspended == 0 );
vTaskSuspendAll();
{
/* Minor optimisation. The tick count cannot change in this
block. */
const TickType_t xConstTickCount = xTickCount;
/* Generate the tick time at which the task wants to wake. */
xTimeToWake = *pxPreviousWakeTime + xTimeIncrement;
if( xConstTickCount < *pxPreviousWakeTime )
{
/* The tick count has overflowed since this function was
lasted called. In this case the only time we should ever
actually delay is if the wake time has also overflowed,
and the wake time is greater than the tick time. When this
is the case it is as if neither time had overflowed. */
if( ( xTimeToWake < *pxPreviousWakeTime ) && ( xTimeToWake > xConstTickCount ) )
{
xShouldDelay = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
else
{
/* The tick time has not overflowed. In this case we will
delay if either the wake time has overflowed, and/or the
tick time is less than the wake time. */
if( ( xTimeToWake < *pxPreviousWakeTime ) || ( xTimeToWake > xConstTickCount ) )
{
xShouldDelay = pdTRUE;
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
/* Update the wake time ready for the next call. */
*pxPreviousWakeTime = xTimeToWake;
if( xShouldDelay != pdFALSE )
{
traceTASK_DELAY_UNTIL( xTimeToWake );
/* prvAddCurrentTaskToDelayedList() needs the block time, not
the time to wake, so subtract the current tick count. */
prvAddCurrentTaskToDelayedList( xTimeToWake - xConstTickCount, pdFALSE );
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
xAlreadyYielded = xTaskResumeAll();
/* Force a reschedule if xTaskResumeAll has not already done so, we may
have put ourselves to sleep. */
if( xAlreadyYielded == pdFALSE )
{
portYIELD_WITHIN_API();
}
else
{
mtCOVERAGE_TEST_MARKER();
}
}
#endif /* INCLUDE_vTaskDelayUntil */
流程如下:
- 挂起调度器;
- 计算下次唤醒的时刻xTimeToWake;
- 如果当前系统tick已经溢出,并且计算的xTimeToWake也溢出但比当前tick大,则设置标志xShouldDelay为pdTRUE;
- 如果当前系统tick没有溢出,并且计算的xTimeToWake在当前tick之后(不管xTimeToWake有没有溢出,溢出则xTimeToWake < *pxPreviousWakeTime,不溢出则xTimeToWake > xConstTickCount),设置标志xShouldDelay为pdTRUE;
- 更新pxPreviousWakeTime为xTimeToWake;
- 检查标志xShouldDelay,如果为pdTRUE,调用prvAddCurrentTaskToDelayedList将任务加入delay链表,阻塞任务;
- 调用xTaskResumeAll恢复调度器,根据返回值判断是否需要让步切换;
vTaskDelayUntil使用示例如下:
// Perform an action every 10 ticks.
void vTaskFunction( void * pvParameters )
{
TickType_t xLastWakeTime;
const TickType_t xFrequency = 10;
// Initialise the xLastWakeTime variable with the current time.
xLastWakeTime = xTaskGetTickCount ();
for( ;; )
{
// Wait for the next cycle.
vTaskDelayUntil( &xLastWakeTime, xFrequency );
// Perform action here.
}
}
参考链接
官网
freeRtos源码分析之调度原理
知乎 FreeRTOS 学习笔记 (三) 调度
ARM64中的内存屏障指令(DMB,DSB,ISB)
[ARM-Cortex-M3/4] 汇编基础与常用指令集
cortex M3 系统svc 系统调用
ARM异常处理(4):SVC和PendSV的作用详解
关于FreeRTOS任务栈的那点事儿
本文来自博客园,作者:流翎,转载请注明原文链接:https://www.cnblogs.com/hjx168/p/17909348.html


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本
· C#/.NET/.NET Core优秀项目和框架2025年2月简报
· Manus爆火,是硬核还是营销?
· 一文读懂知识蒸馏
· 终于写完轮子一部分:tcp代理 了,记录一下