FreeRTOS--邮箱
示例源码基于FreeRTOS V9.0.0
邮箱
1. 概述
一种特殊的队列,队列深度只有1,写数据的时候是覆盖写,读数据的时候,读完不会把数据从队列删除;
写数据的时候永远是成功的,读数据的时候仅第一次队列无数据时会阻塞或失败,当队列有数据后,读都会是成功的;
2. 接口API
// 写队列
#define xQueueOverwrite( xQueue, pvItemToQueue ) xQueueGenericSend( ( xQueue ), ( pvItemToQueue ), 0, queueOVERWRITE )
#define xQueueOverwriteFromISR( xQueue, pvItemToQueue, pxHigherPriorityTaskWoken ) xQueueGenericSendFromISR( ( xQueue ), ( pvItemToQueue ), ( pxHigherPriorityTaskWoken ), queueOVERWRITE )
// 读队列
#define xQueuePeek( xQueue, pvBuffer, xTicksToWait ) xQueueGenericReceive( ( xQueue ), ( pvBuffer ), ( xTicksToWait ), pdTRUE )
BaseType_t xQueuePeekFromISR( QueueHandle_t xQueue, void * const pvBuffer );
-
写队列时通过宏xQueueOverwrite和xQueueOverwriteFromISR调用,其中FromISR是中断服务程序接口,仅在中断服务内使用。写队列的实际接口同普通队列操作,区别在函数参数,xTicksToWait=0,因为写永远成功,不需要阻塞;xCopyPosition=queueOVERWRITE,覆盖写方式;
-
读队列时通过宏xQueuePeek调用,实际接口同普通队列读接口,区别在函数参数,xJustPeek=pdTRUE,表示仅读,读后不删除。中断服务程序使用的接口是xQueuePeekFromISR;
-
创建队列同普通队列,需要注意队列深度只有1;
普通队列的相关接口API见 队列
2.1 xQueuePeekFromISR源码
BaseType_t xQueuePeekFromISR( QueueHandle_t xQueue, void * const pvBuffer )
{
BaseType_t xReturn;
UBaseType_t uxSavedInterruptStatus;
int8_t *pcOriginalReadPosition;
Queue_t * const pxQueue = ( Queue_t * ) xQueue;
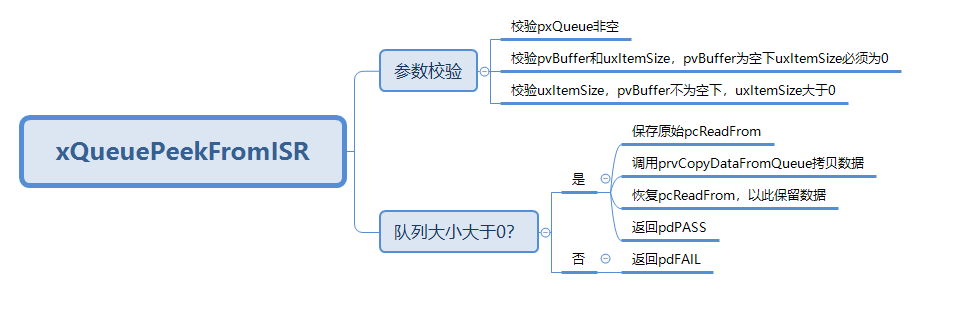
configASSERT( pxQueue );
configASSERT( !( ( pvBuffer == NULL ) && ( pxQueue->uxItemSize != ( UBaseType_t ) 0U ) ) );
configASSERT( pxQueue->uxItemSize != 0 ); /* Can't peek a semaphore. */
/* RTOS ports that support interrupt nesting have the concept of a maximum
system call (or maximum API call) interrupt priority. Interrupts that are
above the maximum system call priority are kept permanently enabled, even
when the RTOS kernel is in a critical section, but cannot make any calls to
FreeRTOS API functions. If configASSERT() is defined in FreeRTOSConfig.h
then portASSERT_IF_INTERRUPT_PRIORITY_INVALID() will result in an assertion
failure if a FreeRTOS API function is called from an interrupt that has been
assigned a priority above the configured maximum system call priority.
Only FreeRTOS functions that end in FromISR can be called from interrupts
that have been assigned a priority at or (logically) below the maximum
system call interrupt priority. FreeRTOS maintains a separate interrupt
safe API to ensure interrupt entry is as fast and as simple as possible.
More information (albeit Cortex-M specific) is provided on the following
link: http://www.freertos.org/RTOS-Cortex-M3-M4.html */
portASSERT_IF_INTERRUPT_PRIORITY_INVALID();
uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
{
/* Cannot block in an ISR, so check there is data available. */
if( pxQueue->uxMessagesWaiting > ( UBaseType_t ) 0 )
{
traceQUEUE_PEEK_FROM_ISR( pxQueue );
/* Remember the read position so it can be reset as nothing is
actually being removed from the queue. */
pcOriginalReadPosition = pxQueue->u.pcReadFrom;
prvCopyDataFromQueue( pxQueue, pvBuffer );
pxQueue->u.pcReadFrom = pcOriginalReadPosition;
xReturn = pdPASS;
}
else
{
xReturn = pdFAIL;
traceQUEUE_PEEK_FROM_ISR_FAILED( pxQueue );
}
}
portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
return xReturn;
}
2.2 xQueuePeekFromISR分析
本文来自博客园,作者:流翎,转载请注明原文链接:https://www.cnblogs.com/hjx168/p/17872013.html

